一种低成本微型无人机姿态估计的数据融合系统外文翻译资料
2022-09-07 14:49:48

英语原文共 15 页,剩余内容已隐藏,支付完成后下载完整资料
一种低成本微型无人机姿态估计的数据融合系统
托比亚斯·龙·弗洛姆
摘要
微型无人飞行器(UAV)由于其广泛的应用和良好的发展趋势已经引起了人们广泛的关注,而要使微型无人机平台在民用领域普及应用,关键问题是整体成本。但是较低的成本一般意味着航空电子设备无人机的梯度会很低。从而导致其导航精度过低,飞行控制性能不足等问题,本文介绍了一种通过几个廉价的传感器来提高低成本小型固定翼的姿态估计的数据融合系统无人机平台。其中对每个传感器的特性和姿态角的计算进行了仔细研究。对融合系统的算法和实施的进行了详细描述和解释。与三传感器融合地面试验的结果进行了比较和分析后,再与飞行试验传感器融合的结果比较,优化其结构。
关键词:数据融合,多传感器融合,无人机导航系统,惯性测量技术估计
1引言
在过去的几年中,微型无人机的发展取得了巨大的进步,航空电子设备,机身及负载方法大大改进,特别是尺寸、材料和能耗方面也做了巨大改进。微型无人机因其在民用、农业和军事领域的广泛应用而引起关注。由于非军用无人机的发展更强调的是低成本的特点,所以寻求低成本传感器导航系统成为一个较为合适的解决方案。
低成本传感器可以提供的测量精度与昂贵的或商业传感系统相比较低。这通常是因为他们的硬件重复精度较低以及相关复杂软件较少。由于低成本传感器精度的限制,我们不能完全依赖其能在飞机姿态估计中发挥重要的作用。但是,如果有几个低成本的传感器,每一个具有不同的特性,把他们组合起来,以达到提高精度,这是可能的。通过使用设计融合其算法,在这种情况下,每一个低成本的传感器都可以用来测量一部分姿态。
如果每个传感器可以估计独立的姿态,那它们基本就可以实现上述目的。但时间久了,有些传感器的精度会降低,响应也会变慢,这会影响一些传感器测量的数据,虽然一些传感器可能会受到环境因素的影响,从而提供不一致的测量,因为传感器的错误积累时间,一些传感器的测量可能开始变得不准确,。所有这些行为都会导致系统性能不稳定,甚至导致系统故障。因此,此数据融合系统采用了传感器的读数来补偿每个传感器的缺陷,可以使近姿态测量优化组合。根据其发展趋势,提高非军事的低成本应用微型无人机的飞行性能是非常必要的。本文报道了我们在这方面的协同努力。
姿态估计是无人机实现自主导航的关键。特别是使用无人机携带遥感载荷地理以作参考用途,精确的姿态估计变得更为重要。对于小型无人机而言,受到其重量和尺寸的限制,其容易受到外部干扰,如风的影响。因此,精确发现原始数据将扮演更为重要的角色,控制稳定整个系统,使自主飞行更安全、顺利。为了保持整个系统的成本尽可能低,同时追求稳定和准确的飞行任务,结合所有可用的低成本传感器通过使用智能数据融合系统是一个首选的解决方案。
本文提出了一种低成本的数据融合系统,基于红外(IR)传感器、惯性传感器和视觉传感器。通过将所有三个传感器的数据集成到加权滤波器的融合系统,从而分析和避免各传感器的不足之处,在一个接近最优姿态估计的基础上的对所有数据进行比较。本文的主要目的是提供一个实用的低成本的解决方案,使用不同的廉价传感器达到微型无人机的精确姿态估计。
本文的组织如下:第2节介绍了基本的无人机姿态角,并比较三种低成本姿态估计森的SORS。第三节解释了这些传感器的姿态估计以及我们的IM实现算法。在第4节中,介绍了以加权滤波器为基础的传感器融合系统。第5节显示了整个系统的实现和前期试验结果。6节总结了这一点,并指出未来的计划。
2.无人机姿态估计的基本要素
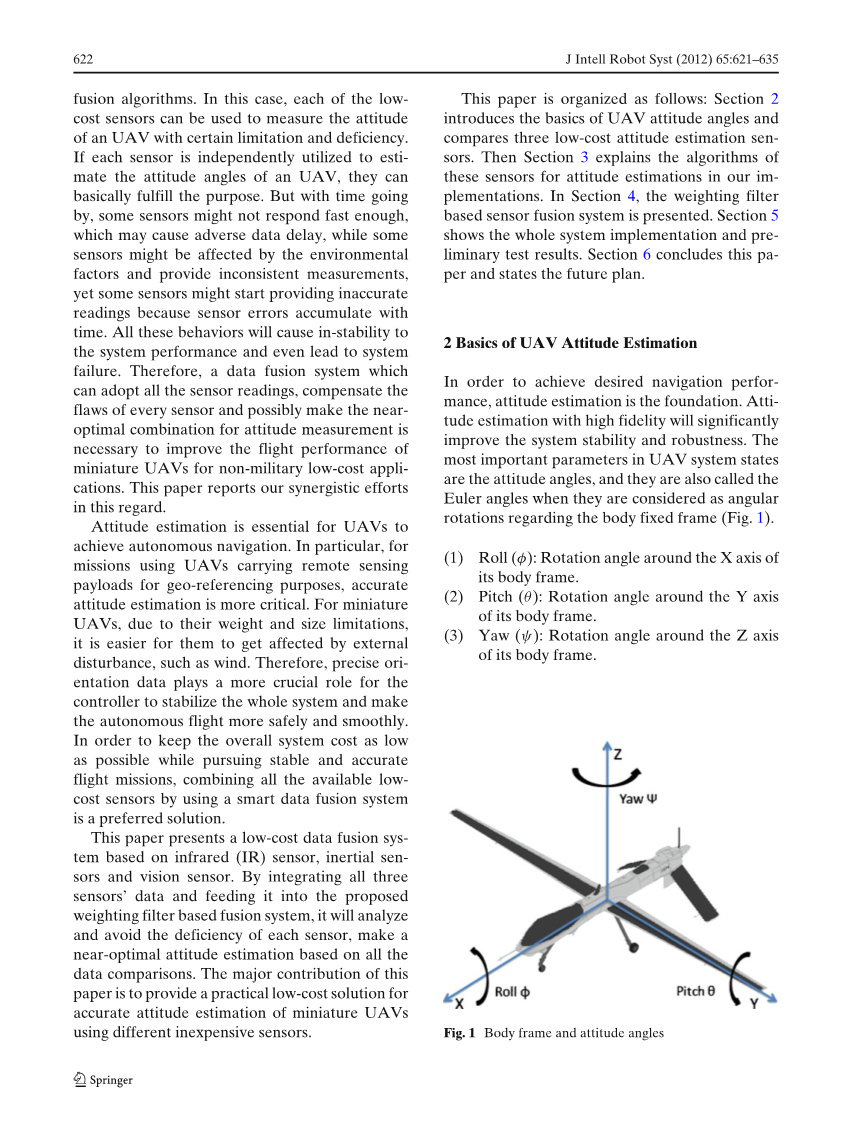
姿态估计是实现导航性能的基础。姿态估计与高保真度将大大提高系统的稳定性和鲁棒性。在无人机系统中,最重要的参数是姿态角,有时它们也被称为欧拉角,它们被认为是角旋转的身体固定框架(图1)。
(1)翻转(phi;):左右旋转角度的本体框架的X轴
(2)倾斜(theta;):左右旋转角度的车身骨架Y轴
(3)偏航(psi;):左右旋转角度的Z轴的主体框架
图1
框架固定于无人机机身上随着欧拉角旋转,在这个坐标系中的某些坐标中,无人机的姿态可以测量。在本文中,重新设计了的机身结构。但是无人机系统不具有传统的控制面比如副翼,方向舵和电梯。它只有两个升降副翼,因为有副翼和电梯的组合,所以没有专用控制偏航角。因此,只有翻转和俯仰角将被考虑。关于机身的细节如下。
在已经使用于无人机导航中的多种类型的传感器,如惯性传感器、热传感器和视觉传感器。他们有各自不同的工作原理,有自己的优点和缺点,他们可以提供所有的姿态测量以辅助自主导航的无人机。热传感器,它已被研究在[ 3 ],具有简单的配置和小的成本。最常见的热传感器,红外传感器,可以测量不同温度下物体发射的红外辐射,并比较其传感表面的差异。基于其内部的光敏性物质变化,传感器的电路也得到改变的电流和电压,然后通过一套算法,计算这些测量,可以对无人机的姿态角进行估计。
传感器数据可以依靠红外传感器产生模拟信号快速采样,以实现快速估计更新。然而,由于红外传感器严重依赖于温度因子,它可以改变在一个室外的区域,如果有时天气变化明显则精度很难把握。因此,它通常涉及某种类型的校准校正传感器,假使传感器可进行校准,则其性能仍然是值得信赖的。
惯性传感器包括陀螺仪和加速器,他们一般连接到一起成为一种惯性测量单元(IMU)。基于其特殊的结构和复杂的滤波算法,惯性测量单元可以提供相当准确的姿态估计,然而大多数的惯性测量单元在市场上是十分昂贵的,他们在军事无人机,航天飞机上更受欢迎,,并不真正适用于民用低成本定向的项目。现列出红外传感器和摄像机各参数对比。见表1。
|
IMU |
红外传感器 |
摄像机 |
|
成本 |
低成本 |
低成本 |
|
速度 |
快 |
慢 |
|
更新 |
可更新 |
可更新 |
|
精度 |
低 |
中 |
|
传感器位移 |
可靠 |
需计算 |
|
温度 |
激励 |
表 1
近年来随着廉价惯性传感器的发展,使用一些不太复杂的算法只需要较小的计算能力,一些低成本含三轴陀螺仪IMU的加速度计和磁力计,甚至已成为[ 4 ]。这些惯性测量单元工作类似于商业性质,但限制其价格低于一二百美元[ 5 ]。
虽然他们的精度比不上工业和商业测量单元,但它们适用于业余爱好者和低成本的无人机项目导航任务。
对于IMU,尤其是低成本的,由于其硬件较为廉价,随时间将会出现大的陀螺漂移量,从而姿态估计将变得不准确,如果积累的误差达到一定程度,而且并没有其他方式来纠正传感器数据。在此情况下,一旦IMU功能失败,无人机系统将受到损害,甚至会崩溃。
另一方面无人机导航已经成为最近的热门话题。而摄像机是一种最常见的视觉传感器,尽管它有其他专门的光学传感器,如中心视觉传感器[ 6 ]。视频摄像机一直在不断地被证明可以在质量和成本上平衡(高分辨率低于100美元)。基于先进的算法,视频摄像机可以提供相当准确的姿态估计。因此,它可以用于无人机自主导航或从其他传感器验证。
基于视觉导航系统的另一个优点是,它不需要GPS [ 7 ],它使系统能运行在室内或有问题的GPS信号接收区。而视觉传感器的姿态估计最大的缺点是:它需要强大的计算能力[ 8 ],而且对低成本无人机工程而言,这意味着另一项费用要投资于微型计算机或其他硬件。为了保持尽可能低的整体成本,计算能力必须被牺牲
掉,这意味着传感器的更新率不能超过一定的限制。然而,由于摄像机能够提供可靠的姿态估计,它可以结合红外传感器和IMU整顿他们的可读性和提高整体系统的导航性能。
在低成本传感器的简要介绍中,可以看出,红外传感器和IMU都能够进行合理的姿态估计,与GPS一样,他们可以单独作为导航装置指挥无人机自主飞行。视频摄像机还能够提供中等保真度的姿态测量。然而,受成本约束的限制,其传感器的更新率不能支持无人机导航。现列出相关测量单元的价格和举例。见表2.
|
IMU 种类 |
价格 |
举例 |
|
导航级别 |
gt;50 k |
霍尼韦尔 HG9848 |
|
战术级 |
10–20 k |
霍尼韦尔HG1900 |
|
工业级 |
0.5–3 k |
应变GX2 |
|
用户级 |
lt;500 |
分析研究和发展单位 |
表2 IMU类别
3:传感器姿态估计算法
3.1红外传感器
使用红外传感器的无人机姿态估计已经实现了[ 9 ],红外传感器和全球定位系统是自主导航和红外传感器的特点,它可以对方位角进行详细分析。通常红外传感器需要一对一工作,所以表现为覆盖Z轴和另一个作为掩护的X轴和Y轴的水平通道的垂直通道。图2显示了一个在固定翼无人机上安装2个红外传感器的例子。
大多数红外传感器有两到四个检测端口,正如上图所示,垂直传感器只使用两种传感端口而水平传感器使用所有四个传感端口。每一个传感口都会接收红外辐射,并互相比较,然后得出姿态角。但在本文中,我们将重点放在倾斜角和俯仰角的计算和机身设计的原因上。
倾斜环的原始数据(研发),沥青环(磷)
和顶部(吨)被定义为以下方程
|
r = kla times; (s1 s2) , |
|
p = kln times; (s2 minus; s1) , |
|
t = kv times; s3, |
其中S1是从通道1的计算值 图 2
阅读,S2是2频道的计算值
阅读,
一旦倾斜环,沥青环和顶部的原始数据
得到,倾斜角和俯仰角可以
计算使用公式[ 10 ]:
因为这些装置可能有一些错误,导致最终侧倾和俯仰计算有差异,有时是有必要来补偿这些添加中性变量。然而,在这种情况下,它是假定红外传感器是正确的安装,所以所有的中立的值被认为是零。
3.2惯性测量单元
一项最具代表性的详细研究估计算法是在[ 5 ],这几种传感器融合算法的研究惯性测量单元,包括一般的扩展卡尔曼滤波器—三、四元数为基础的扩展卡尔曼滤波,基于欧拉角的扩展卡尔曼滤波,GPS辅助的扩展卡尔曼滤波互补滤波器。由于这些算法,特别是各种卡尔曼滤波器,用于高精度惯性传感器的研制,他们可能需要强大的计算能力。
对于低成本的惯性传感器,通过精度和功耗之间的平衡,互补的过滤器已被证明是一个合适的解决方案[ 11 ]。大多数惯性测量单元至少包括加速度计和陀螺,更多的GPS和压力传感器可以进行准确的估计。加速度计被用来直接测量一个物体的姿态是因为其可以测量重力,陀螺仪是用来测量在无人机机身框架的一定轴的角速度及对角度的估计整合。磁强计的测量可以提供无人机的角度,它也能够补偿陀螺偏置。GPS可以提供信息包括绝对位置、高度,一个物体的速度和航向角。
系统可以利用集成三轴加速度计,三轴陀螺仪,一个外部的全球定位系统的端口接收机。为了计算姿态角
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[146608],资料为PDF文档或Word文档,PDF文档可免费转换为Word



