高精度平面环形定位轨道系统的设计外文翻译资料
2022-09-08 12:48:02
英语原文共 49 页,剩余内容已隐藏,支付完成后下载完整资料
5.3笛卡尔坐标控制器
在本章节,我们将呈现关于笛卡尔坐标控制器的稳定性分析的主要结果。现在我们已经可以用公式表达一个笛卡尔坐标控制器问题。以我们计划中的在关节坐标使用能量成型的控制器为代表,现在我们在空间直角坐标系中运用这种方法。
5.3.1空间直角坐标系中的能量成型
能量成型是一种可以用动力学和一种在平衡点和阻尼点通过稳定性梯度塑形使这种平衡有引力的人工势能设计控制算法的技术。计划中的控制算法由人工势能加上一个速度反馈的梯度编写。我们使用如下的笛卡尔坐标控制方法:
(169)
应人工势能表述如下所示:
(170)
另外,项是微分作用。我们使用如下所示的李雅普诺夫法:
(171)
是一个确定函数。能量成型法包括找到一个函数来满足之后的李雅普诺夫条件:
(172)
对这个李雅普诺夫等式求导,可以得到:
(173)
满足条件:
(174)
用拉萨尔定理验证渐近稳定性:
(175)
总的来说,当我们将空间直角坐标中的动态模型,即等式(124),和(169)式中的控制法同时考虑,那么这个闭环系统在这里是稳定的,定位目标如下所示:
(176)
已经实现。
证明:这个闭环系统是由空间直角坐标系中的机器人动态模型等式(124)和控制方法(169)式这个闭环系统相结合而获得的,而且控制方法(169)式可以写为:
(177)
这是一个自治微分方程等式,其状态矢量空间的原点是它唯一的平衡点,我们需要考虑到惯性矩阵的逆矩阵表达形式仅存在于当雅克比行列式满足假设1时。考虑到自治系统:
(178)
f:在这里是中的希兹映射。令作为的一个平衡点。令V:连续可微分,正定函数例如。令,并且假设在中除了平凡解外,没有可以使其保持相等的解,则在这里原点稳定。在我们实例中,由闭环系统等式(178)给出,其中。状态矢量空间的原点是(178)式的唯一平衡点。令连续可微分,正定函数例如。使这个区域:
, (179)
因为,是一个关于t的递减函数。在紧集中是连续的,所以它在中收敛。
例如,它满足。因此在时有极限。所以而且唯一的不变量是和。因为受限于,这个平凡解是闭环系统的唯一解(178),因此结论是状态矢量空间的原点在这种方法中是渐近稳定的。
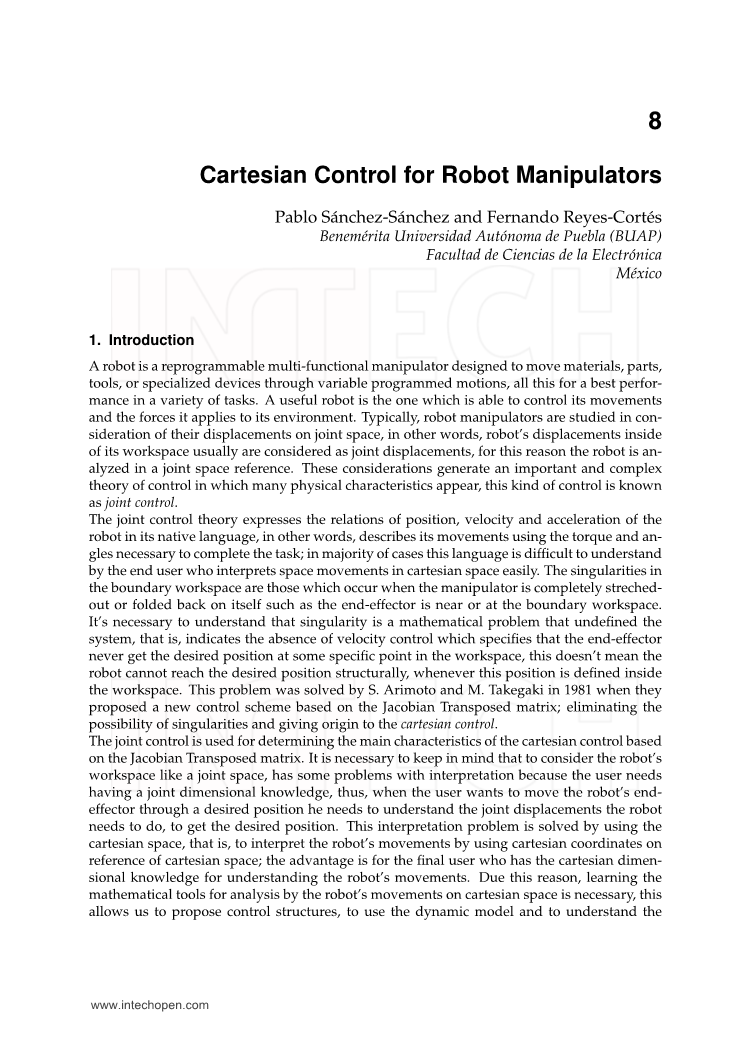
如下图所示的图标描述了空间直角坐标系机器人操纵器的动态模型及其控制器结构的关系,详细说明了一个位置控制器。
图6.空间直角坐标系中的动态模型和控制方案图
5.3.1.1PD笛卡尔坐标控制器
在本章节中,我们回忆对作为例子的PD笛卡尔坐标控制器的稳定性证明如下所示:
(180)
其中表示在笛卡尔坐标中的位置误差,是理想位置,和分别是命题和微分增益。
这个控制问题可以通过选取设计矩阵和来表述,因而也就是说位置误差在这种方法中为零。
(181)
通过结合笛卡尔坐标机器人模型,即等式(124)和控制方案,即等式(180),可以得到闭环系统等式,该等式可以写为:
(182)
这是一个自治微分等式,而且状态矢量空间的原点是它的唯一平衡点。为了完成等式(182)的稳定性证明,我们计划如下空间直角坐标系中调整的基于能量成型法的候选李雅普诺夫方程式:
(183)
中的第一项是一个关于的正定函数,因为在本次研究的案例中是一个正定矩阵。第二个候选李雅普诺夫方程式(183)是一个关于位置误差的正定函数,因为是一个正定矩阵。因此是一个整体的正定径向无界函数。候选李雅普诺夫方程式(183)的时间导数沿着闭环(182)的轨迹线,
(184)
然后经过一些代数运算以及利用在5.2.1.2中描述的柯氏力和向心力项的性质。它可以被写为:
(185)
这是一个半负定函数,因此我们用平衡点的稳定性来进行推断。
为了用这里的方法证明渐近稳定性,我们应用拉萨尔不变集原理来开发闭环(182)的自治性:
(186)
在如下的范围中
(187)
唯一的不变量是。
5.3.1.2PD型笛卡尔坐标控制器的多项式族
这个控制结构是一个[Reyes amp;Rosado]和[Saacute;nchez-Saacute;nchez amp; Reyes-Corteacute;s]所设想的关节空间一般化的控制方案。关于计划中的有PD型结构及其总体渐近稳定性分析的控制器的多项式族。我们想要将简单PD控制器的结果推广到一大类用于操纵空间直角坐标系机器人的多项式PD型控制器。考虑到之后的有重力补偿的控制方案由下式所得:
(188)
其中表示笛卡尔坐标中的位置误差,是理想位置,和分别是命题和微分增益,而是多项式特征根。通过结合笛卡尔坐标中的机器人操纵器的动态模型,即(124)式,和控制方案,即(188)式,可以得到闭环系统等式,该等式可写为:
(189)
其中,它是一个自治微分方程而且其状态矢量空间的原点是它唯一的平衡点。为了分析平衡点的存在,我们用下述方法求和的值:因为和。
为了证明等式(189)的稳定性,我们拟采用如下的基于空间直角坐标系中的能量成型法的候选李雅普诺夫方程式:
(190)
其中的第一项是一个关于的正定函数,因为在本次研究课题中是一个正定矩阵。第二个候选李雅普诺夫方程式(190)的是一个关于位置误差的正定函数,因为是一个正定矩阵。因此在这里正定。简单笛卡尔坐标PD控制器是当j=1时PD型笛卡尔坐标控制器的多项式族中的一个典型案例。候选李雅普诺夫方程式(190)沿着闭环(189)的轨迹线的时间导数:
(191)
经过一些代数运算以及利用在5.2.1.2中描述的柯氏力和向心力项的性质,它可以被写作:
(192)
这是一个半负定函数,因此我们用平衡点的稳定性来进行推断。为了用这里的方法证明渐近稳定性,我们应用拉萨尔不变集原理来开发闭环(189)的自治性:
(193)
在如下的范围内
(194)
唯一的不变量是。因为(192)式在这里是一个半负定函数,而李雅普诺夫方程式(190)是一个正定径向无界函数,因此它应满足:
(195)
位置误差的界限由如下公式给出:
(196)
其中和分别表示对角矩阵的最大特征值和最小特征值,因为微分增益的限制:
(197)
其中和分别表示对角矩阵的最大特征值和最小特征值,严格地来说是一个正常数,总的来说,惯性矩阵的无限性需要所有关节必须是外旋副:
(198)
其中是的元素。
5.3.1.3帕斯卡笛卡尔坐标控制器
现在,我们展示一个基于帕斯卡三角的控制结构,
(199)
其中表示空间直角坐标系中的位置误差,,分别是命题和微分增益,,。闭环系统等式通过结合空间直角坐标系机器人控制器的动态模型,即等式(124),和控制结构,即如下等式,得到
(200)
这是一个自治微分方程,而且其状态矢量空间的原点是它唯一的平衡点。基于帕斯卡三角和后面的三角双曲函数,
(201)
我们在根中解各项,给出如下所示的三角:
(202)
代入根,可得:
(203)
画出代入根的各项的图像,我们得到:
当乘tanh方程的根,我们通过下述方法调整方程的性态:
为了实现(200)中的稳定性分析,我们拟采用如下空间直角坐标系中调整的基于能量成型法的候选李雅普诺夫方程:
图7.代入根的各项
图8完整性态
(204)
中的第一项是一个关于的正定函数,因为在本次研究的课题中是一个正定矩阵。第二个候选李雅普诺夫方程式(204)的是一个关于位置误差的正定函数,因为是一个正定矩阵。因此在这里正定。候选李雅普诺夫方程式(204)沿着闭环(200)的轨迹线的时间导数:
(205)
经过一些代数运算以及利用在5.2.1.2中描述的柯氏力和向心力项的性质,它可以被写作:
(206)
这是一个半负定函数,因此我们用平衡点的稳定性来进行推断。为了用这里的方法证明渐近稳定性,我们应用拉萨尔不变集原理来开发闭环(200)的自治性:
(207)
在如下的范围中
(208)
唯一的不变量是。
5.4实验装置
我们设计并建立了一套试验系统,用来研究笛卡尔坐标机器人控制算法,而且当前它是一个用于开发和验证如图5所示的笛卡尔坐标控制的在三维空间三自由度运动的机器人操控器算法的总控键系统。
图9实验母模“钻孔机器人”
该结构的主体材料是不锈钢,由Reliance Electronics伺服电动机直接激励传动轴。这种方式驱动传动轴的优点是转矩高。这个伺服电动机有一个Hewlett Packard的增量编码器。
实验系统中使用的电动机型号是E450 型 [450 oz-in.]。伺服机构以转矩模式运转,所以如果转矩发出一个来自电动机里的增量编码器的关于位置的信号信息,电动机以1024000p/rev的分辨率按参考运动。
5.4.1实验结果
为了支撑我们的理论发展,本章节展示一个在空间直角坐标系中使用三自由度的实验系统的三点控制器之间的对比实验。为了研究各控制器的性能,将它们区分为:表示简单PD控制器,表示PD型笛卡尔坐标控制器的多项式族,代表帕斯卡笛卡尔坐标控制器。所有控制结构都是在空间直角坐标系中的。为了分析各控制器,特性对于比较各自的性能来说是必要的。因为我们使用了范数,这个范数是标量值。一个越小代表位置误差越小,因此该控制器的性能也就越好。为了比较笛卡尔坐标机器人的控制器的性能,我们设计了一个位置控制实验。这个实验的内容是从控制器的初始位置移动操纵器的末端器到一个固定的理想目标。根据应用现状,我们选择理想位置为:
(209)
其中,和的单位是米并且代表原型中的x,y和z轴。初始位置和速度均设置为零(例如一个静止位置)。摩擦力不因补偿的目的而建模。也就是说,所有的控制器都不体现任何形式的摩擦力。我们需要记住摩擦力的现象没有一个可供建模的数学结构。用C语言编写待评估的控制器。执行2.5ms的抽样率。将如下表所示的增益用于目标控制器。
|
参数 |
数值 |
|
359.196 |
|
|
35.5960 |
|
|
4.85400 |
|
|
lt;
剩余内容已隐藏,支付完成后下载完整资料 资料编号:[146325],资料为PDF文档或Word文档,PDF文档可免费转换为Word |



