大空间3D打印机Z轴机械手末端配重绳索牵引机构设计开题报告
2020-02-10 23:10:57
1. 研究目的与意义(文献综述)
1 目的及意义(含国内外研究现状的分析)
1.1 研究意义
与传统的机加工方式如车、铣、刨、磨等减材制造相比,3d 打印(增材制造)具有生产工序简单、制造周期短、加工对象范围宽、工艺结构灵活等优点。随着软件技术和互联网的发展,3d 打印技术在智能制造中的价值与日俱增#61531;1#61533; 。根据 3d 打印所用材料的状态及成形方法,3d 打印技术可分为熔融沉淀成型(fdm)、光固化立体成型(sla)、分层实体制造(lom)、电子束选区融化(ebm)、激光选区融化(slm)#61531;2#61533; 、金属激光熔融沉淀(ldmd)等,其中熔融沉淀成型技术成熟度高,成本较低,是最常见的 3d 打印技术#61531;3#61533;。而作为以机器人为主题的 21 世纪,机器人在 3d 打印领域中的应用日趋广泛。
机器人种类繁多,从结构上看可归结为机器人手臂,移动机器人以及人性机器人。机器人手臂又可分为串联式和并联式,移动机器人可分为陆地移动型和空中飞跃型,人形机器人则是两者的集大成,是可以移动的机械臂或四肢#61531;4#61533; 。3d打印机器人就是基于 3d 打印技术、机器人机构学、机械臂结构拓补优化等整
合发展而来的。
水泥材料作为道路工程、桥梁工程的基本材料,在建筑行业起着不可替代的重要作用,以水泥作为 3d 打印材料在建筑行业正引起广泛关注。但以水泥材料为主体的土木工程结构尺寸大、质量大,由此导致打印喷头整体质量大,对支撑其运动的机械臂而言有效载荷重量比低、结构笨重、功耗高#61531;5#61533;。而对于服务性机器人而言,其必须是轻量级的且与人交互安全,节能环保,这就使机械臂的轻量化设计变得异常重要。由于一个轻量化的设计可能会以一个过于“软”的机器人而告终,这使得系统容易发生不必要的振动。因此,需要考虑对合规性的设计约束。而约束条件是基于运动性能、动力要求和结构强度限制的,以此减轻重量#61531;6#61533; 。故而一种绳索牵引机构以减轻末端执行器支撑重量的设计不得不提上日程。
1.2 研究现状
目前的 3d 打印机机器人大多底座固定在地面,如韩兴国等人#61531;7#61533; 研究的悬臂式 3d 打印机器人,李享#61531;8#61533;发明的履带式移动打印机器人,马少如等人#61531;9#61533; 发明的平移打印机器人。然而这些机器人都存在悬臂长度过长,末端下挠严重,刚度较差等问题。故提出了基于全方位小车的顶端移动平台倒置 3d 打印机器
人,并通过麦克纳姆轮实现全方位移动平台以控制机器人 x、y 方向的运动#61531;10#61533; 。z 轴运动控制如杜欣等人提出的双连杆柔性机械臂的主动控制,采用非线性解耦反馈控制方法分别得出系统大范围运动方程和柔性臂的动力学方程,并采用机械臂逆动力学方法和 lqr 方法分别设计大范围运动控制律和压电作动器控
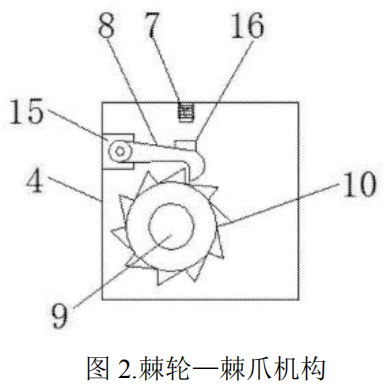
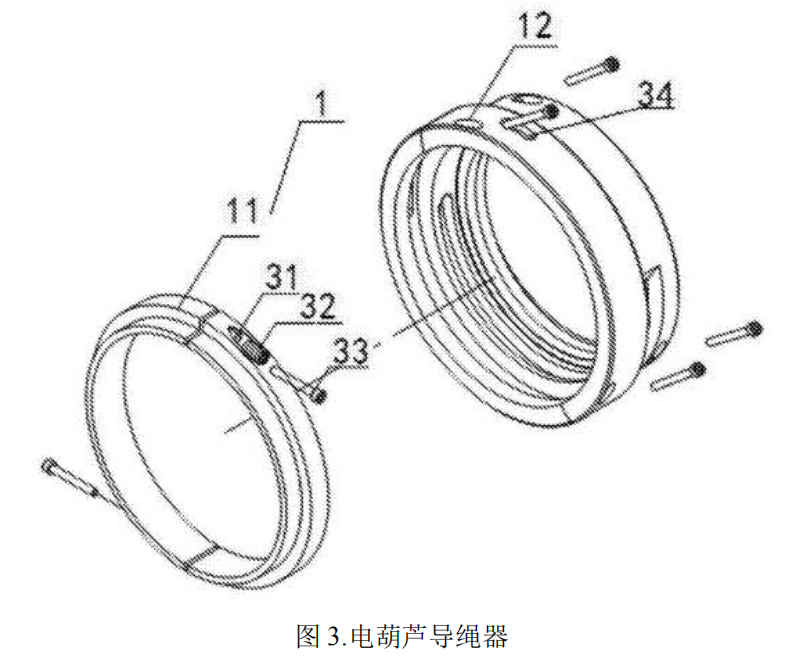
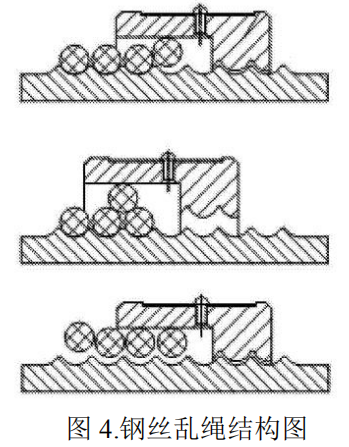
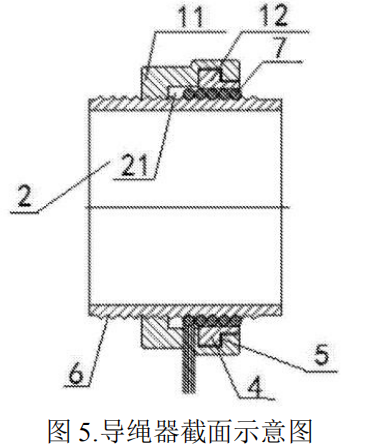
制律以控制机械臂到达的指定位置,并且抑制柔性臂的弹性振动#61531;11#61533;。z 轴末端牵引机构的设计可类比电动葫芦工作原理,其一般是由电动机电动机、传动机构和卷筒装置或链轮机构组成,具有体积较小、自身的重量较轻,操作起来比较简单,且使用方便的优点#61531;12#61533; 。如图 1,图 2 所示,李幸凯#61531;13#61533;发明的微型电葫芦设置了棘轮与棘爪,能够在电机故障时阻止卷筒反转防止重物突然掉落。刘显明#61531;14#61533; 发明的用于电力行业的电葫芦起重机设有激光对准器确保支撑梁与载物架对正。如图 3,图 4,图 5 所示,郭春华#61531;15#61533;等人发明的电动葫芦导绳器能解决在无重力情况下发生乱绳,松绳的问题,不需借助任何重力就能卷入、排出钢丝绳。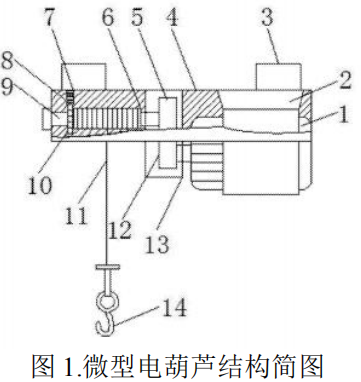
1.3 研究问题
基于大空间 3d 打印机械臂的 z 轴末端配重绳索牵引机构设计,主要通过机构设计,改变机械小臂的末端承载情况,减轻驱动阻力,减小驱动力矩,在运动学、动力学、结构强度满足的情况下实现机械臂的轻量化。
2. 研究的基本内容与方案
2 基本内容和技术方案
2.1 基本内容
该牵引机构设计包括受力分析,机械结构的布局设计、传动系设计、导向设计、竖直保持器设计、轴系结构设计、仿真与反馈控制等。
2.2 技术方案
(1)由于打印喷头的总质量为 20 千克,为实现机械臂的轻量化,考虑以牵引机构重新进行承载分配,可拟定牵引机构承载 18 千克拉力,而由机械臂承载拉力值降为 2 千克。
(2)为节约成本,经济环保,可采用线绳或钢丝绳牵引,但绳索牵引机构的驱动绳索只能受拉不能受压,因而 n 自由度的绳索牵引并联机构至少要由n 1 根绳索来驱动才能实现确定的运动。故需在绳索机构中引入弹簧,依其提供的弹簧力,可以使绳索张紧。通过选择适当的弹簧布置位置和参数(初始长度、刚度系数)改善弹簧与绳索的受力情况#61531;16#61533; 。
(3)打印喷头与绳索牵引机构应始终保持竖直以保证加工精度及防止因绳索倾斜产生斜向分力带来的机械臂优化设计困难,可采用滚珠-丝杠机构并将两段螺纹连接设计为导程相同,螺距相反的结构。
(4)为防止电机故障造成机械臂受力的脉冲突变,应设置棘轮-棘爪机构实现反相行程自锁,并通过电磁铁控制棘爪的工作状态。
(5)为防止卷绳错乱,可设置导绳机构实现绳索的限位。
(6)在进行运动仿真过程中,还应在小臂末端配置拉力传感器并连接到电机上,实现反馈控制。
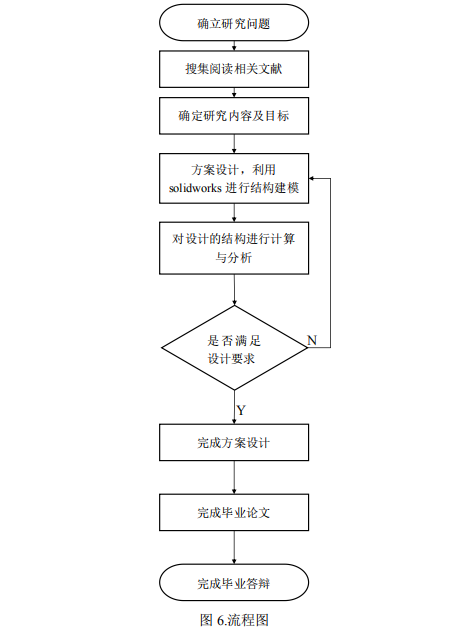
(7)在进行传动轴轴系设计时,应合理选材,同时根据轴上零件布置位置进行阶梯轴结构设计,并考虑载荷大小及变化情况以选择合适的轴承组合及其布置方式。流程图见图 6。
3. 研究计划与安排
第 1-3 周:认真阅读任务书,查阅相关文献资料,明确研究内容,完成开题报告的撰写,并完成至少一篇英文文献的翻译。
第 4-6 周:完成方案设计,包括受力分析、布局设计、传动系设计等。
第 7-12 周:完成导向机构设计、竖直保持器设计、轴系结构设计、仿真与反馈控制等,并完成至少一张图纸的绘制工作。
4. 参考文献(12篇以上)
[1] 曲凯等.一种便捷式 3D 打印机结构设计[J].科技与创新,2019,3:53-54.
[2] 郑明桥.我国制造出大尺寸高精度金属零 3D 打印[J].表面工程与再制造,2016.
[3] 张学军等.3D 打印技术研究现状和关键技术[J].材料工程,2016(2):122-128.
[4] 尹海斌.刚柔耦合动力学———轻量化协作机器人设计与控制的力学基础———解读《机器人刚柔耦合动力学》[J].中国机械工程,2018,12:3020-3023.
[5] H. Yin, S. Huang, M. He, J. Li, A unified design for lightweight robotic arms based on unified descriotion of structure and drive trains, International Journal of Advanced Robotic Systems, 14 (2017), 1-14.
[6] Zhou, L., and Bai, S., A new approach to design of a lightweight anthropomorphic arm for service applications, Journal of Mechanisms and Robotics, 7(3)(2015).
[7] 韩兴国等.一种悬臂式 3D 打印机器人的路径规划研究[J].组合机床与自动化加工技术,2018(3):135-139.
[8] 李享.一种 3D 打印机器人及打印系统[P].中国专利:109049269,2018-10-24.
[9] 马少如等.一种 3D 打印机器人装置[P].中国专利:109016501,2018-12-18.
[10]桑凌峰等.轮椅担架一体化护理机器人设计[J].机械设计与研究,2018,10:65-69.
[11]杜 欣 , 蔡 国 平 . 双 连 杆 柔 性 机 械 臂 的 主 动 控 制 [J]. 上 海 交 通 大 学 学 报 .2009,8:1248-1253.
[12]李慧娟.电动葫芦发展现状分析与研究[J].时代农机,2017,6:93-95.
[13]李幸凯.一种微型电葫芦[P].中国专利:207827730,2018-02-02.
[14]刘显明.一种用于电力行业的电葫芦起重机[P].中国专利:108545606,2018-05-12.
[15]郭春华,李涛.电动葫芦导绳器[P].中国专利:109095373,2018-11-08.
[16]李清桓等.绳牵引机器人加入弹簧后刚度分析[J].震动与冲击,2017(36):197-223.



