一种三指软体机械手抓机构设计开题报告
2020-02-10 23:11:04
1. 研究目的与意义(文献综述)
一. 目的及意义(含国内外研究现状)
1.研究目的
传统设计制造的刚性操作手和灵巧手的功能或形态的机械装置已经被广泛应用到人类日常生活工作中的各个领域[1],它们把人类从繁重、重复、乏味等的劳动中解放出来,实现了工业生产的机械化和自动化,提高了生产效率。而这些机械手主要由金属材料制成,依靠精确的控制实现对物体的抓取机械手往往负责工业现场中结构性的、重复的、笨重的、较危险的工作,并向着高定位精度、高灵活性以及高速度等方向发展;而机械手主要体现在具有较多的自由度和精确的力位控制上,为了保证被抓物体的安全和完整,对具有较多自由度的刚性灵巧手的控制是非常复杂的[2]。随着社会发展,科技的进步,人们在诸多领域对机械手提出了新的要求,比如需要机械手和医生协作共同完成一台手术、帮助人类抓取一些易碎、易损坏水果或柔软的物品等,这体现在人——机、机——环境交互的安全性、友好性以及灵活性等,传统的机械手在面临这些新要求的时候展示出很多的局限性,很多时候不能满足需求。目前,人类而从自然界中获得很多灵感,设计出了仿生软体机械手 [3-5],软体手的出现在很多方面填补了这些性能需求的空白。相比于传统机械手,软体机械手是一种由柔性材料制成的新型机械装置。凭借柔性材料天然的柔顺性和适应性,软体机械手具有了高灵活性、复杂环境适应性和安全人机交互性,且能耗低等特点,受到国内外学者和研究机构的广泛研究,并表现出良好的应用前景。
2.研究现状
目前,关于软体机械手的研究已取得很多较大的进展。软体机械手的驱动方式主要分成三种:利用气体为传输介质的气压驱动、利用柔性线作为传输介质的拉线驱动和利用直接可变形的新型智能材料作为驱动(形状记忆合金(Shape memory alloy,SMA)和电活性聚合物(E1ectroactive polyer,EAP)等)。
2004年英国Shadow机器人公司研制的Shadow五指手 [6],如图 2所示,外形上跟人手很像,共有19个自由度,具有位置、触觉及压力传感器,利用柔绳及滑轮驱动手指各个关节的运动,具有很高的灵活性,几乎能实现人手所有动作。但缺点是传动的柔绳装置结构较为复杂,驱动装置笨重,运动的柔顺性差,控制动作的精度差,而且能耗也比较大。
| 图 1 Toshiba软体手 |


| 图 2 Shadow五指手 |
为了解决柔绳驱动中存在的损耗问题及机械手柔顺性的问题,气动驱动机械手的方式开始大量被研究。日本东芝公司设计的Toshiba软体手[7],如图 1所示,基本能实现抓取、移动物体和拧螺钉等简单动作,而且柔顺性也比较好[8],其中,FMA 既是手指的一部分,又是驱动元件。Toshiba 灵巧手虽然基本解决了柔顺性问题,但控制系统十分复杂,并且在执行重载任务时手指易发生侧向弯曲,与柔绳驱动相同,该气动驱动的机械手同样需要笨重的辅助装置。
随着材料科学的发展,科研人员开始把研究的目光投向以形状记忆合金 SMA 为代表的新型智能材料驱动方式上。SMA在外力作用下易于变形,其在低温下被施加的应力产生形变后,应力去除,形变不消失,当对其加热至高温达到逆相变终结温度以上时,它可以迅速、完全恢复到低温下塑性变形前的形状,并且在高温状态下,它的屈服应力远高于低温时的应力。此时,形状记忆合金不仅产生较大位移形变,而且能输出较大的恢复应力,对外做功[9]。与柔绳驱动、气压驱动等方式相比,SMA 具有较高的功率质量比和致动力,基本上可以解决以上两种方式的不足。清华大学杨天夫等人设计了一种由智能材料形状记忆合金差动弹簧驱动的机械手[10],如图 3所示。该SMA机械手由SMA驱动器驱动6杆机构实现2个手指抓取和释放动作。但这个软体机械手的柔顺性还是有些不足。

图3 SMA驱动的机械手
综上所述,目前国内外研究中虽然对柔性线驱动和气动驱动的问题都有认识[11-16],对由形状记忆合金等新型智能材料驱动的软机械手也有很多研究,但总体上还没有大的进步[17-19],基于国内外研究现状中存在的问题,本课题选择以SMA 驱动的三指软体机械手爪进行研究,针对由SMA 驱动的软体机械手爪的机构进行优化改进。
2. 研究的基本内容与方案
二.研究(设计)的基本内容、目标、拟采用的技术方案及措施
1.研究基本内容
(1)方案调研。阅读相关文献,学了解软体机械手的基本原理和国内外的研究现状。归纳总结已有的研究成果所具有的优缺点,明确研究问题及研究目标。
(2)初步设计方案。对课题有了基本的构想后,设计利用具有不同收缩特性的形状记忆合金串联来模拟人工肌肉,通过对形状记忆合金丝通电加热可以改变手指的刚度和弯曲程度,作为软体机械手爪的驱动装置,设计出三指软体机械手爪的结构。
(3)再利用 Abaqus 等软件对软机械手进行有限元分析,分析机械手的结构特性,改进描述数学模型,调整优化机械手结构。
(4)结构优化。通过不断分析与建模改进,对软体机械手的结构进行优化设计以满足设计要求。
(5)完成毕业论文的撰写。
(6)完善相关材料准备参加毕业答辩。
2.研究的目标
根据在收集文献资料过程中发现的问题,确定本次研究的目的为设计出一种具有较好的灵活性和柔顺性三指软体机械手爪结构。
3. 拟采用的技术方案及措施
根据研究问题确立初步设计方案,利用 SolidWorks 等CAD软件建立三指软体机械手结构的三维模型,建立数学模型对建立的模型进行描述、分析,研究所设计的软体机械手的相关特性。同时,基于 Abaqus 等软件对软体机械手结构进行优化。通过不断优化,得到最佳软体手抓结构。
前面所述的整个研究措施可以用如图 4流程图表示:
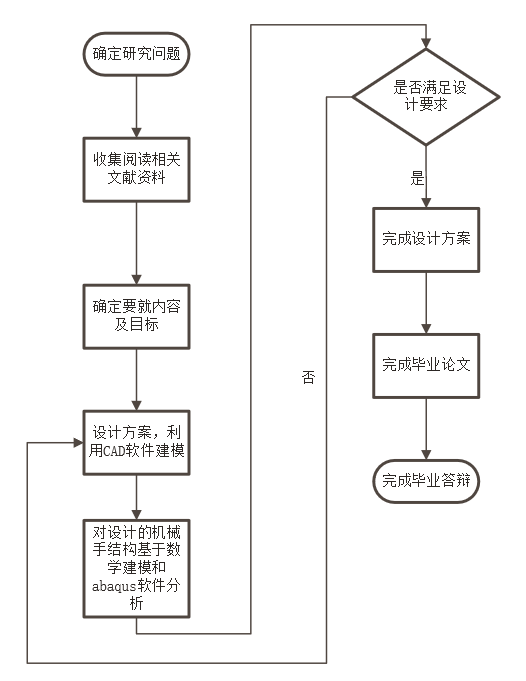
| 图 4 研究技术方案流程图 |
3. 研究计划与安排
三.进度安排
第1-3周:认真阅读任务书,查阅相关文献资料,明确研究内容,完成开题告的撰写,并完成至少一篇英文文献的翻译。
第4-6周:完成方案设计。
4. 参考文献(12篇以上)
四.参考文献
[1]刘伊威,赵京东.机器人灵巧手的研究与发展[j].机械传动,2009,33(04):126-129.
[2]张进华,王韬,洪军,王煜.软体机械手研究综述[j].机械工程学报,2017,53(13):19-28.



