DTA-2型太阳能跟踪驱动装置设计毕业论文
2020-04-05 11:04:08
摘 要
如何更加高效的利用太阳能成了能源日益缺乏的今天研究的重点课题之一。现在利用太阳能普遍是通过光伏系统将光能转换为电能,主要也是以固定的方式来利用太阳能,但是固定式光伏系统存在利用率的问题,所以针对该问题,本文设计了一个通过单片机控制的双轴机械太阳能跟踪的装置系统,以实现太阳能电池板对太阳的跟踪,从而可以提高太阳对太阳能电池板的辐射量,最终达到提高太阳能的利用率的目的。要实现对太阳的双轴跟踪,主要要实现两个运动,即太阳能板方位角的调整和高度角的调整。本文的设计为利用步进电机通过蜗轮蜗杆减速器,再带动装置的方位轴,从而实现太阳能板方位角的调整,蜗轮蜗杆减速器还能实现自锁,以增加系统的稳定性和跟踪精度;太阳高度角的追踪是利用步进电机带动丝杠从而控制俯仰轴来实现。本设计对双轴太阳能跟踪器主要进行了机械系统和控制系统的设计,利用传感器采集光信号,再经过单片机分析处理,“识别”太阳光线,通过控制两个步进电机,完成对太阳的双轴跟踪。晴天时,能实现太阳能电池板与太阳光线保持垂直;阴天、夜晚或者太阳辐射较弱时,光电传感器采集不到光信号,系统不跟踪。整个设计对太阳能的利用率有了很大提高。[1][2]
关键字:双轴太阳能跟踪器;自动控制;单片机;蜗轮蜗杆减速器;
Abstract
How to make more efficient use of solar energy has become one of the key issues in today's research that energy is increasingly lacking. Nowadays, solar energy is commonly used to convert light energy into electricity through photovoltaic systems. The main reason is to use solar energy in a fixed manner. However, there are problems with the utilization of fixed photovoltaic systems. Therefore, in this paper, a dual-controller-controlled dual-control system is designed for this problem. Shaft mechanical solar tracking device system, in order to achieve solar tracking of the solar panels, which can increase the solar radiation on the solar panel, and ultimately achieve the purpose of improving the utilization of solar energy. To achieve two-axis tracking of the sun, we must achieve two movements, namely the adjustment of the solar panel azimuth and the adjustment of the elevation angle. The design of this paper is to use stepper motor through the worm gear reducer and then drive the azimuth axis of the device to realize the adjustment of solar panel azimuth. The worm and worm reducer can also realize self-locking to increase the stability and tracking accuracy of the system. The tracking of the solar altitude angle is achieved by using a stepping motor to drive the screw to control the pitch axis. This design mainly designs the mechanical system and control system for the dual-axis solar tracker, uses the sensor to collect the optical signal, and then analyzes and processes the single-chip microcomputer to “recognize” the solar light. By controlling two stepper motors, the dual-solar system is completed. Axis tracking. On sunny days, the solar panels can be kept perpendicular to the sun's rays; when cloudy days, nights, or when the solar radiation is weak, the photoelectric sensors cannot acquire light signals and the system does not track them. The entire design has greatly improved the utilization of solar energy.
Key Words:Dual axis solar tracker; Automatic control; Single-chip microcomputer; Worm gear reducer
目录
摘要 1
第1章 绪论 3
第2章 太阳能跟踪器总体设计 5
2.1太阳运行规律 5
2.2跟踪方式的比较 5
2.2.1单轴跟踪 5
2.2.2双轴跟踪 6
2.2.3机械跟踪方式的选择 6
第3章 机械装置和系统设计 8
3.1 方位角跟踪装置的设计 8
3.2 俯仰角调节的装置设计 15
第4章 太阳能跟踪器控制系统设计 17
4.1跟踪方案的比较和选择 17
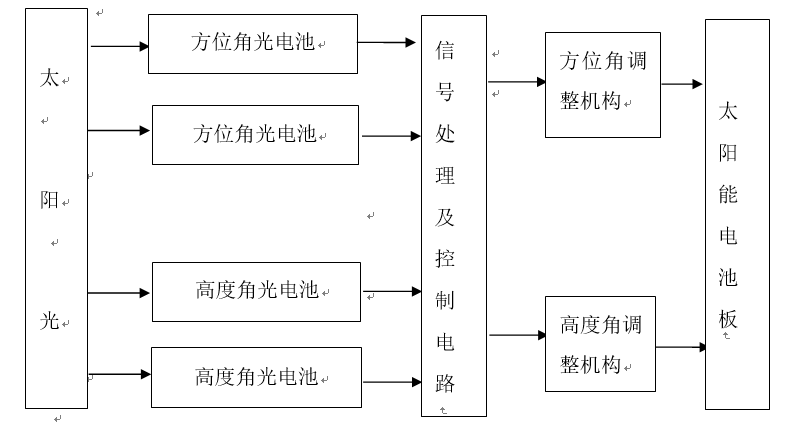
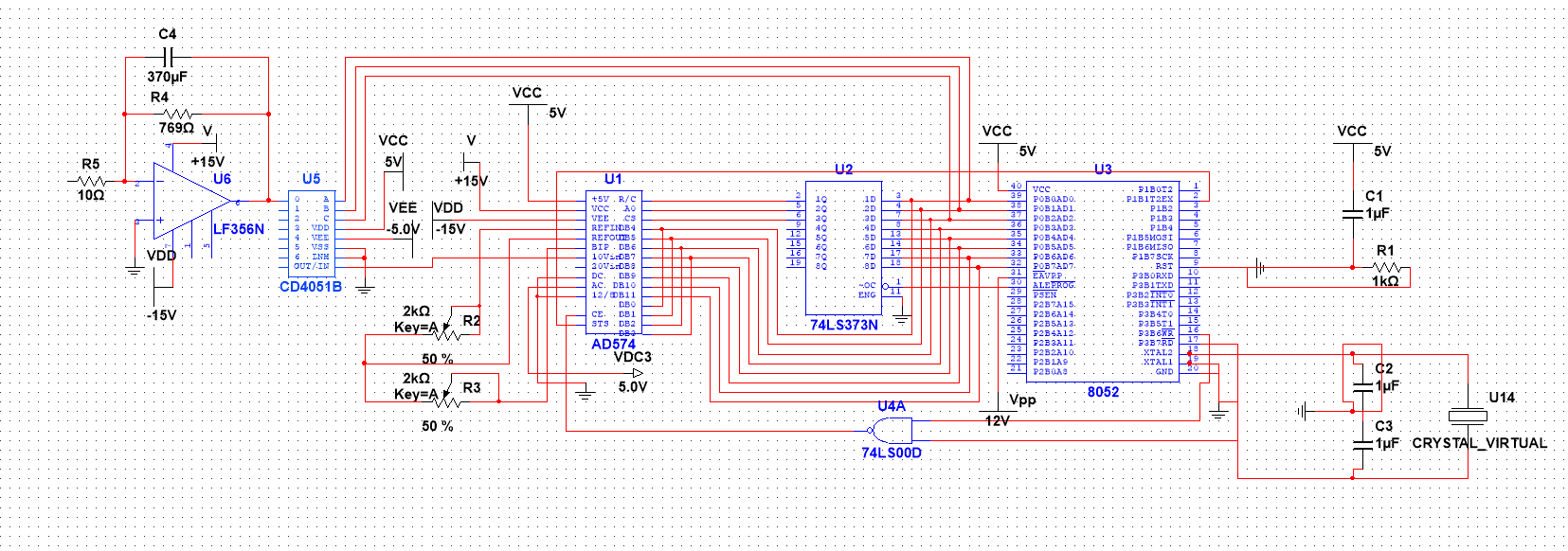
4.2控制系统硬件组成 18
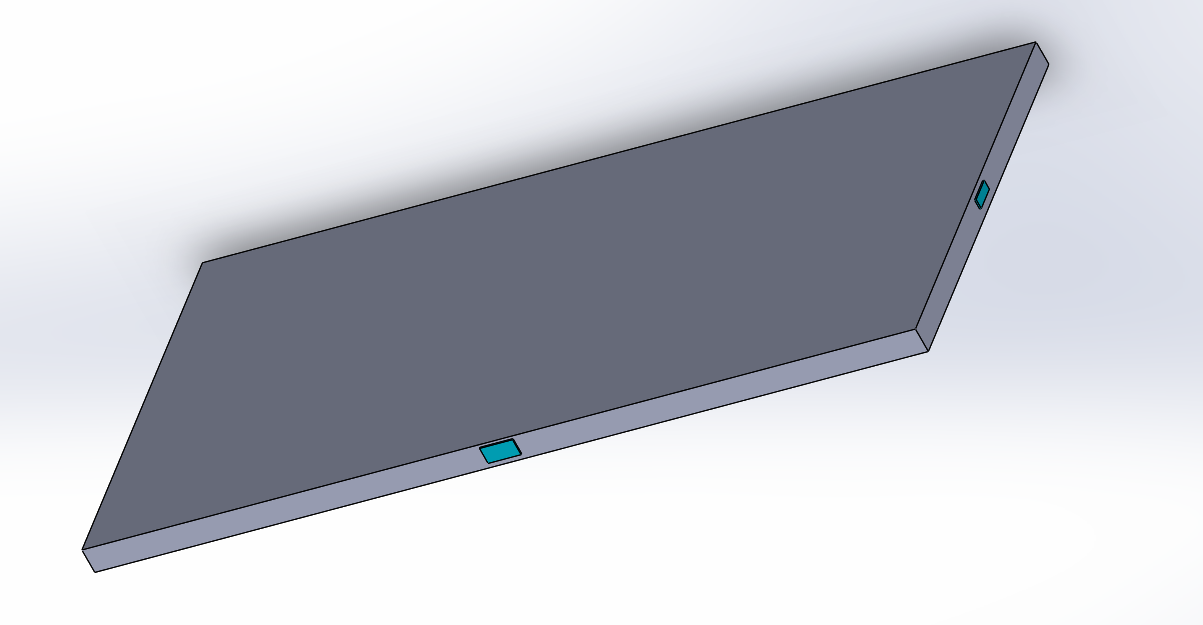
4.2.1光电池传感器的安装 19
4.2.2控制系统硬件选择与控制电路 19
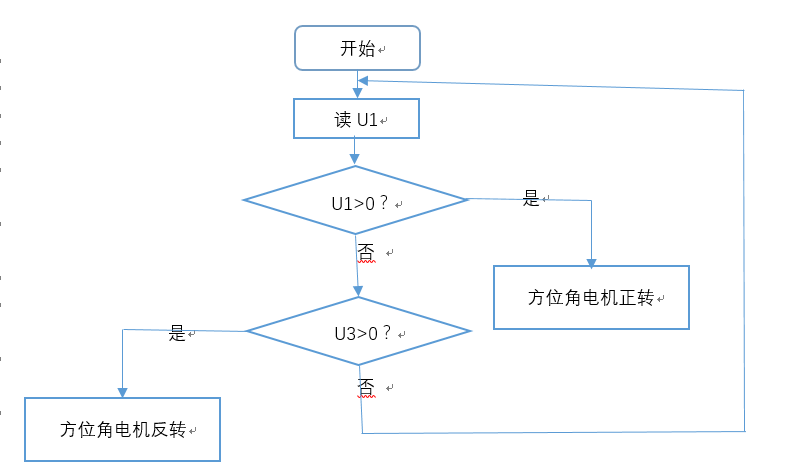
4.3控制系统软件设计 20
第5章 发电效率比较 22
5.1固定式日发电量 22
5.2跟踪式日发电量 23
5.3发电效率的提升 23
第6章 结论 24
参考文献 25
致谢 26
第1章 绪论
目前,全世界很多国家面临能源短缺的问题,甚至因为一些能源问题而产生政治和战争危机,当今社会,不可再生能源如石油日益缺乏,能源问题又是影响一个国家经济的重要一环,在整个人类文明发展和人类生存中也占有比较重要的地位,所以,对清洁能源的开发和利用成了很多国家和地区重视的研究课题。太阳能清洁无污染,利用过程基本不受地域限制,而且最大的优点是取之不尽用之不竭,能作为人类永久利用的一种能源,发展前景非常广阔和乐观。但是就目前看来,由于科学技术的限制,太阳能的开发和利用存在一些问题,如太阳能的相对密度较低、有间歇性的特点,太阳光照方向和强度随时间不断变化,一些地区的太阳能也不够丰富,太阳能的利用就更存在问题,这些问题导致了太阳能的利用效率不高,在现今经济文明社会,这些因素就很显然的成为了影响太阳能发展的短板,如何解决这些问题成了研究的重点。从一个方面出发,如果能设计一个系统,始终保持太阳能电池板和太阳垂直,使其接收到该地区最大的太阳辐射,则能大大提高太阳能的利用率。由此,本文根据对应的思路,设计出了太阳能跟踪器,具体设计是通过机械系统和控制系统,利用相关运动,来实现太阳能电池板对太阳的实时跟踪,从而增加太阳能电池板接受的太阳的辐射量,辐射量增加,太阳能电池板其日用功率和年输出功率就得到了相应的增加,最终增加了对太阳能的利用。但是,从设计和成本的角度上来说,太阳能跟踪器比固定式系统的各方面的成本都要高,固定式太阳能板只需要做一个支架,然后将支架固定在地面上即可实现发电,跟踪器则要较为复杂的机械装置和控制系统,所以成本会高出很多。然而,从设计目的的角度出发,太阳能跟踪器能通过增加输出功率而产生更多的电能,从而降低了成本。据国外研究,单轴太阳能跟踪器比固定式太阳板发电装置的发电量增加了25%左右,而双轴太阳能追踪器比固定式太阳板发电装置的发电量增加了40%左右,所以,从长远的角度来看,太阳能跟踪器的应用前景十分广阔。[3]
本文设计了一个双轴机械装置的系统,通过单片机控制相应的运动,完成对太阳的跟踪,以提高太阳能的利用率、增加发电量。双轴跟踪是分别跟踪太阳方位角和高度角。利用步进电机的输出,再通过蜗轮蜗杆减速,从而带动太阳能发电装置的方位轴的转动,以实现太阳能板方位角的调整,当太阳能板的方位角和太阳方位角相等时,即完成了跟踪。蜗轮蜗杆减速器不仅能减速,还能实现自锁,以增加整个发电装置的稳定性和跟踪精度;利用步进电机带动丝杠,在设计相应的运动转换机构,将运动传递到太阳能板的俯仰轴,使之与太阳的高度角对应起来,从而完成对太阳高度角的追踪[4]。本设计对双轴太阳能跟踪器主要进行了机械系统和控制系统的设计,利用光电传感器采集信号,再经过单片机分析处理,“识别”太阳光线,通过控制两个步进电机,完成对太阳光的跟踪。晴天时,光电传感器采集光信号,控制系统控制电机,是整个太阳能板与太阳光垂直;阴天、夜晚或者太阳辐射较弱时,光电传感器采集不到光信号,系统不跟踪。整个设计对太阳能的利用率有了很大提高。
第2章 太阳能跟踪器总体设计
2.1太阳运行规律
一年的每个时刻,太阳相对于地球的位置都能确定。地球的自转和围绕太阳公转导致了每时每刻太阳相对于地球的位置的不同,由于地球不是绕着地球南北轴线自转的,所以,下一时刻太阳相对于地球的位置的变化的规律性不是很强。但是地理天文学中已经能将每时每刻太阳相对于地球的位置计算描述出来,即用太阳方位角和高度角来准确描述。
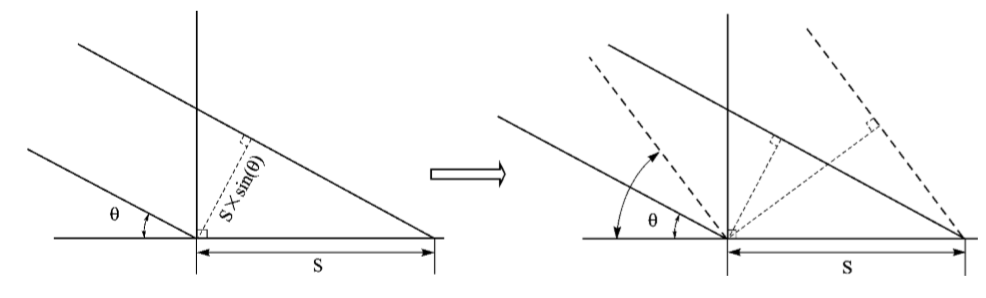
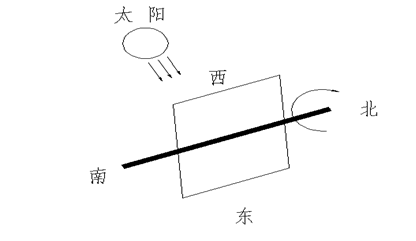
太阳所在的方位为太阳方位角,是指太阳光线的投影与经线的夹角,形象的说,就是物体影子与正东或者正西方向的夹角。太阳光与地平面之间的夹角为太阳高度角,也可叫做俯仰角,形象的说是眼睛看太阳,视线与正前方的地平线的夹角[1]。当太阳高度角为90°时,此时太阳光直射太阳板,太阳能电池板接受到的太阳辐射强度最大。
2.2跟踪方式的比较
按照跟踪方式,对太阳的跟踪可以分为单轴跟踪和双轴跟踪。
2.2.1单轴跟踪
单轴跟踪是控制太阳能板某一方向的运动来实现跟踪。模型如图所示如图2-1所示。
2-1单轴跟踪
如图所示为单轴跟踪装置。控制器输出控制指令,通过电机,控制转轴转动,控制太阳板的俯仰角(高度角),以达到跟踪太阳的目的。采用单轴跟踪的特点是结构简单、成本相对较低,对比固定式太阳板,能较小幅度提高太阳能的利用率和发电量,但是因为控制原因,太阳能电池板基本不能做到与太阳光线垂直,所以太阳板的效率也不是特别高。
2.2.2双轴跟踪
双轴跟踪是通过控制太阳能板的两个方位的变化,实现跟踪。实现太阳双轴跟踪可分为以下两种方式:(1)极轴式跟踪,(2)高度角方位角跟踪。
(l) 极轴式跟踪
极轴式跟踪是通过两个轴控制太阳板,一根轴指向正北方,其转动的速度与太阳相对于与地球运动的速度大小相同方向相反;另一跟轴与此轴垂直,称为赤纬轴,电池板按照季节时间的变化围绕赤纬轴作俯仰运动以适应赤纬角的变化,进而完成对太阳的追踪。这种控制方式简单,但机械结构的设计较为复杂,支承结构不易设计。
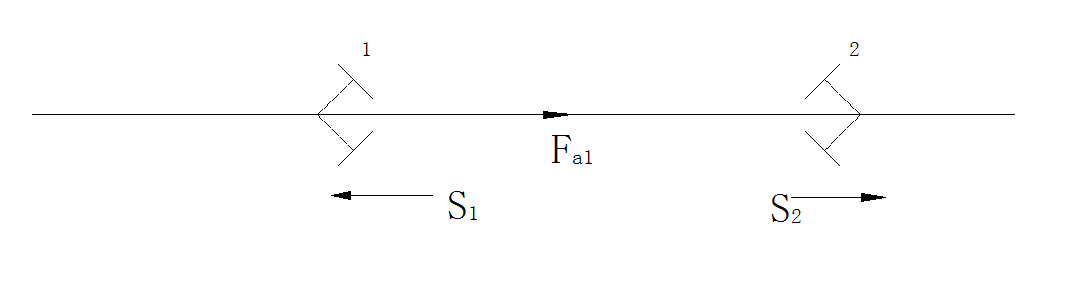
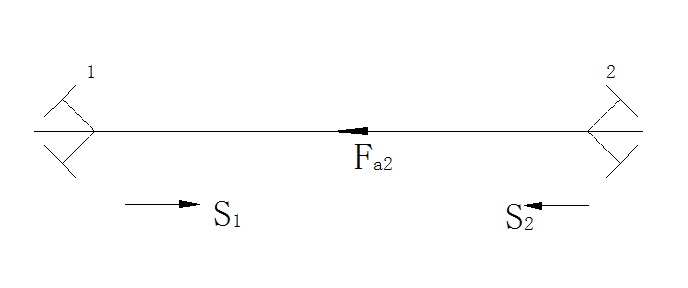
(2) 高度角方位角跟踪
如图2-2所示,太阳板由机械装置支承,方位轴、俯仰轴控制太阳板的角度的变化,方位轴与地面垂直,俯仰轴于方位轴垂直,这样要想实现太阳能板的两个角度的变化,就能转换到两个轴来实现。所以,这种跟踪方式就是通过控制俯仰轴和方位轴,再通过运动传递和转换,来实现电池板始终与太阳光线垂直。这种跟踪装置的跟踪准确度较高,设计合理得当,能实现太阳能板对于太阳的完全精确跟踪,而且这种方式的设计能用整根轴支承整个装置,在机械设计方面也更存在可行性和合理性。
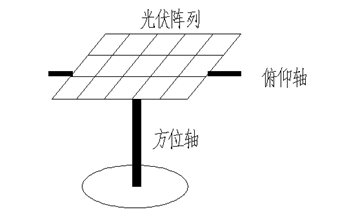
图2-2高度角方位角跟踪
2.2.3机械跟踪方式的选择
根据上述的讨论分析可知,从设计初衷、设计成本、设计实现的难易程度考虑,再考虑本人的能力因素,本次设计中采用双轴式自动跟踪。
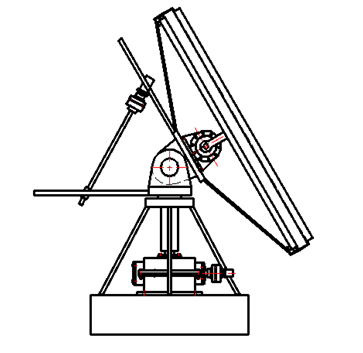
图2-3跟踪装置总体方案
上图为总体设计方案。步进电机1的转动输出,经过蜗轮蜗杆传递,将运动转换为方位轴的转动,从而实现了太阳能板对太阳方位角的追踪,采用蜗轮蜗杆减速器,既是利用其减速功能,又能利用其自锁功能,防止风载荷对太阳能板产生很大的影响。步进电机2通过丝杆连接固定支架和太阳能电池板,从而带动俯仰轴,改变太阳能板的俯仰角,实现太阳高度角追踪。
第3章 机械装置和系统设计
3.1 方位角跟踪装置的设计
跟踪太阳方位角采用步进电机输出轴经过蜗轮蜗杆减速器,然后带动太阳能电池板旋转的方式实现。步进电机输出轴经过蜗轮蜗杆减速器,能降低启动速度增大转矩,蜗轮蜗杆减速器还能实现自锁,以增加系统的稳定性和跟踪精度。下面主要设计蜗轮蜗杆。
经过基本的估算,总质量200Kg,所以支承轴承的基本静载荷为2000N,选择型号为81220。
取轴承摩擦系数为0.004,由此算得摩擦力为F=11.4N,进一步可算得摩擦阻力距为Mf=0.568N·m,将过载情况考虑在内,将摩擦力距扩大两倍得Mf=1.136M·m
所以摩擦阻力距为Mf=1.136M·m,计算得电机的输出轴的最小转矩的大小至少是:
选择什么型号的步进电机是根据输出转矩来定的。因为最小转矩是0.033M·m,选用110BYGH250B步进电机,其输出轴直径为19mm。
蜗轮蜗杆类型、精度等级、材料及齿数选型
1) 蜗杆:45号钢,淬火处理,涡轮:锡青铜
2) ,,,,导程角
确定许用应力
涡轮许用接触应力 ;
涡轮许用弯曲应力 ;
查《机械设计手册》表16.5-14,有
润滑方式采用脂润滑,所以得(滑动速度影响系数)。假定该设备工作环境平均温度为30℃,使用寿命为6年,一年运行299天,每天9小时,JC=40%,可得
齿轮应力循环次数为:
查《机械设计手册》图16.5-4得
许用接触应力的大小为
许用弯曲应力的大小为
齿面接触疲劳强度校核
查表得,接触强度的大小为:
查表16.5-11,得
查表16.5-12,得 (使用系数) (载荷分布系数) (载荷系数)
涡轮运动需要客服的克服的摩擦阻力距:
所以得
满足。
涡轮齿根弯曲强度校核
查表得
则
查《机械设计手册》图 16-5-18,得
满足。
尺寸计算
蜗杆尺寸
计算蜗杆的直径系数为:
计算蜗杆的齿顶圆直径为:
计算蜗杆的齿根圆直径为:
蜗杆轴向齿厚为:
蜗杆的法向齿厚为:
蜗杆螺纹部分长度为:

根据圆整,可得40mm
涡轮几何尺寸计算
齿数:
分度圆直径:
涡轮喉圆直径为:
齿根圆直径为:
涡轮外圆直径为:
涡轮宽度为:
涡轮齿顶圆弧半径为:
涡轮齿根圆弧半径为:
表3-1 蜗轮蜗杆的基本参数:

设计并计算校核蜗轮轴
轴上阻力距为:
圆周力:
径向力:
轴向力:
根据计算,可得出理论上轴的最小直径
材料:45钢,调质
查表得,并且经过选取得,于是得
轴结构设计
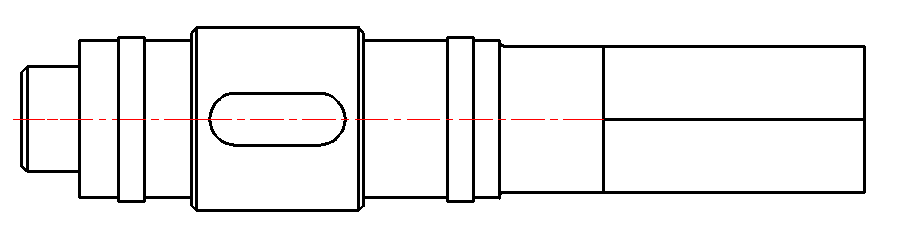
图3-1 轴上结构
轴的强度的校核与相关计算细节
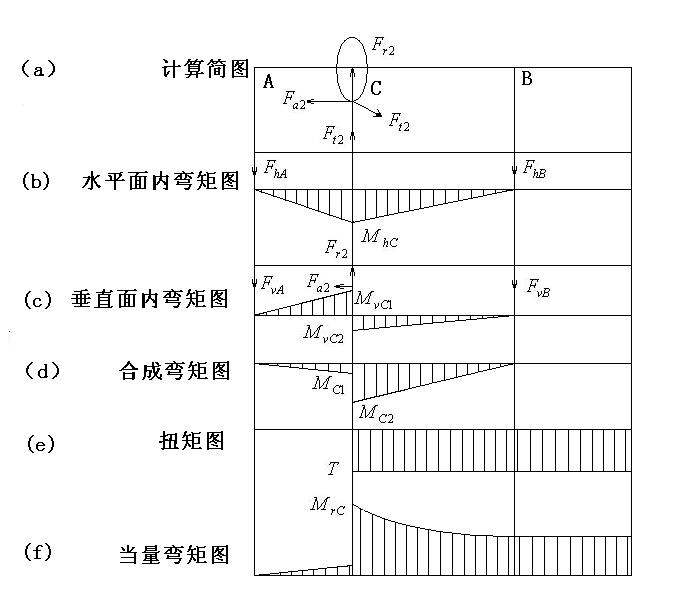
图3-2 轴的计算图
绘制的图如上所示





以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: