轮式排水管道检测机器人运动机构设计毕业论文
2020-04-08 14:25:08
摘 要
近年来,现代化城市的建设使得排水管道建设成为市政基础设施规划中非常重要的一部分;与此同时,排水管道的泄露、堵塞等问题也引起了人们的重视。管道检测机器人可以降低管道勘测工作的繁复性、危险性和困难性。
本文设计了一种可以在直径为300mm以上的管道中进行检测作业的轮式排水管道检测机器人,该机器人具有检测功能、运动检测功能、驱动功能及传动功能,能够在复杂的排水管道内部环境中完成检测作业。
本文着重于轮式排水管道检测机器人的运动机构的设计,采用两个电机驱动、锥齿轮和链轮传动使机器人具有500N以上的推进力;并对运动机构的各主要零部件进行了设计计算及校核,验证了这种运动机构的合理性。
关键字:排水管道,机器人,轮式,运动机构
Abstract
In recent years, the construction of modern cities has made the construction of drainage pipelines a very important part of municipal infrastructure planning. At the same time, problems such as leakage and blockage of drainage pipelines have caused people's attention to the fact that pipeline inspection robots can reduce the complexity of pipeline survey work. Sex, danger and difficulty.
This paper designs a wheeled drainage pipeline inspection robot that can perform inspection operations in pipelines with a diameter of 300 mm or more. The robot has detection function, motion detection function, driving function and transmission function, and can be in the complex drainage pipeline internal environment. Finish the test job.
This article focuses on the design of the movement mechanism of the wheeled drainage pipeline inspection robot. It uses two motors to drive, and the bevel gear and sprocket drive make the robot have 500N or more propulsive force; and the main components of the movement mechanism are designed and calculated. The verification verified the rationality of this movement mechanism.
Keywords: Drainage pipe, robot, wheeled, motion mechanism
目录
中文摘要 I
Abstract II
第1章 绪论 1
1.1研究的目的及意义 1
1.2国内外研究现状 2
1.3毕业论文主要内容 6
第2章 总体方案设计 8
2.1功能需求分析 8
2.2功能实现方法 9
2.2.1检测功能的实现方法 9
2.2.2运动检测功能的实现方法 9
2.2.3驱动功能的实现方法 9
2.2.4传动功能的实现方法 10
2.3轮式排水管道检测机器人的总体方案 10
2.4本章小结 11
第3章 主要零部件设计计算 12
3.1电机和减速箱的选择 12
3.2锥齿轮的设计计算和校核 13
3.2.1锥齿轮的设计计算 13
3.2.2锥齿轮的强度校核 16
3.3链轮链条的设计计算与校核 18
3.3.1链轮链条的设计计算 18
3.3.2链轮链条的强度校核 19
3.4轴的设计计算 20
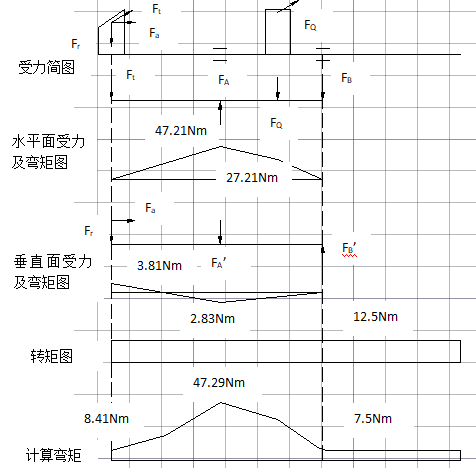
3.4.1Ⅰ轴的设计计算及校核 20
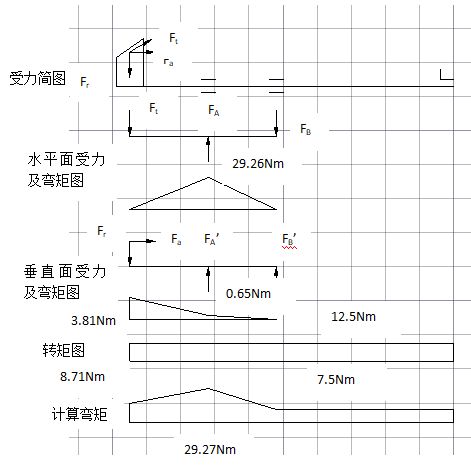
3.4.2Ⅱ轴的设计计算及校核 23
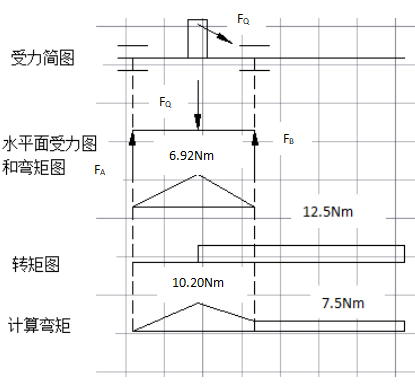
3.4.3Ⅲ轴的设计计算及校核 24
3.5滚动轴承的选择计算 26
3.5.1Ⅰ轴轴承的选择计算 26
3.5.2Ⅱ轴轴承的选择计算 27
3.5.3Ⅲ轴轴承的选择计算 28
3.6联轴器的选用计算 28
3.7本章小结 29
第4章 总结 30
参考文献 31
致谢 32
绪论
1.1研究的目的及意义
随着现代化城市的进一步建设与扩张,排水管道铺设的数量、规模和范围越来越大,排水管道网络已成为城市的现代化建设过程中必不可少的市政基础设施。另一方面,城市的快速扩张也使得越来越多的废水和废物需要经由排水管道来排放。这些废水多具有腐蚀性,城市排水管道网络为多段连接到一起形成的,因此连接处会较为薄弱,容易被排水管道中具有腐蚀性的排放物所腐蚀;此外,废物随废水在排水管道中移动时,由于水速较慢,可能会在排水管道的弯管处滞留。时间一长,管道就会出现堵塞或者泄露的情况,这不仅对污水的排放十分不利,而且可能会污染干净水源或导致城市在暴雨天积水。因此对排水管道进行定期检测维修就显得十分重要。
目前,排水管道的检测维修大多依靠人工来完成。人工检测排水管道的工作十分繁琐:通常需要先将停止相关设备的运行,逐段挖开道路,再拆开管道或阀口进行逐个排查,最终确定异物或者管道泄露位置;检查维修后还需要将修理好或者新的排水管道再次铺设,埋入地下,重新进行排水工作。这不仅会消耗掉大量的人力物力,而且在进行排水管道维护过程中为了安全而停掉部分设备可能会对附近的居民生活造成影响;另一方面,排水管道中的排放物多具有腐蚀性或者毒性,人工检测要求检测人员对拆开的排水管道进行细致的检测检查,这就使得检测人员需要近距离且长时间的接触这些腐蚀物质,因此检测人员具有一定的安全隐患。通过分析现代城市排水网络和我国人工检测的现状,可以发现我们亟待开发一种可以代替人工的管道检测方法来提高排水管道的检修效率、降低检修工人劳动强度以及降低检修人员受到有毒物威胁的可能性。
近年来,随着机器人技术的飞速发展,不论是工业机器人还是服务型机器人都得到了长足发展,这体现了机器人技术已在我们生产生活的各个方面得到了广泛的应用。在管道检测方面也出现了集智能化与机械化为一体的检测机器人系统。管道检测机器人属于机电一体化的产物,其运动机构多采用机械传动方式传递动力,而检测与控制部分则为远程控制。管道检测机器人拥有强劲的动力性能,越障能力强大,能够适应复杂的管道内部环境以进行检测作业。排水管道检测机器人在排水管道内运动,通过CCD系统对排水管道内部情况进行监视、记录、拍摄等,再将这些检测的结果传输到地面接收装置上,地面操作人员根据检测结果对机器人的运动进行操作并按段记录排水管道内部情况,以便对排水管道内出现问题的位置进行维修。运用排水管道检测机器人可以代替人工检测完成排水管的定期检测与监视。
1.2国内外研究现状
排水管道检测机器人按行方式可以分为轮式机器人[[1]]、脚式机器人[[2]]、履带式机器人[[3]]和蠕动式机器人[[4]]。
其中脚式机器人通过机械足来运动,适应环境的能力强,对环境的影响程度也较小,但是这类机器人的控制和驱动都十分复杂,体积和重量也较大,不适合大多数的的管道[2]。履带式机器人前进依靠履带,履带的面积大,因此其与管内壁的接触面积也相交其他机器人大,附着力大,这使得履带机器人的越障能力十分优越;缺点是履带式机器人的驱动传动机构较为复杂,导致其结构尺寸较大,无法在较小的管道中使用[5]。蠕动式机器人像蠕虫一样通过身体的伸缩进行运动,比起其他管道机器人来说拥有稳定性好、通过崎岖地形能力强、牵引力大等的优点,但不可忽视的是其运动效率较低,且不易控制[4]。
目前运用最为广泛的是轮式管道机器人,轮式管道机器人按照其行走机构的设计的不同,又可以分为支撑轮式机器人和车型式机器人两种。
支撑轮式管道机器人[6]的结构对称,其行走机构,即行走轮支撑在管道内壁上。支撑轮式管道机器人的行进轮与车身间依靠支撑杆连接,支撑杆可以伸长收缩,因此当管道直径发生变化时,机器人可以根据变化自动调整自身大小。支撑轮式管道机器人的运动稳定性好,牵引力大,可以在倾角较大的管道内行走。
车型式管道机器人[6]在管道内的行走类似车辆在地面的行走方式。其结构简单,行进平稳可靠,在管道内运动较为灵活。但是这种机器人不能攀附在排水管道内部上,只能依靠自身重量提供正压力,因此不能进入垂直或倾角大的管道。但其与支撑轮式相比,有着结构更加简单、控制系统更加容易操作的优点。
目前,美国、德国、日本等国家的管道机器人技术的研究已相当成熟,处于世界领先地位,部分已形成了产业化[7]。英国、韩国等国家也相继研发出了不同系列的管道机器人。我国在这方面虽然开始研究较晚,但发展十分迅速,取得了十分显著的研究成果,许多大学和科技公司也相继研制开发出来了各种类型的管道机器人。
美国密歇根大学Grzegorz Granosik和Johann Borenstein等人研制的蛇形管道机器人[8],如图1.1所示,该机器人每个单元模块由一个电机驱动,行进机构为履带,因此其越障能力较强。模块单元之间通过三自由度柔性连接,该柔性关节通过气动方式来实现上下左右自由转动,但采用柔性关节会使机器人的控制系统比较复杂,且难以对运动精度实现实现高精度控制。
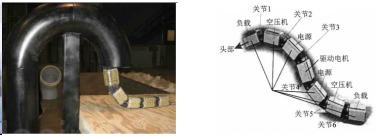
图1.1 美国蛇形管道机器人
德国的IPEK管道机器人[9]是欧美市场上最为广泛的产品,其功能强大,可适应复杂的管道环境;GRAWLER系列管道机器人采用四轮驱动方式且其驱动系统有着二级变速器,动力强进。该系列机器人的CCD系统放在可以进行摆动和转动的云台系统上,可以实现全方位实时监控。如图1.2所示,GRAWLER RX400机器人可以用于直径为Φ400~Φ1200mm 的管道。


图1.2 德国IPEK公司GRAWLER RX400 图1.3 日本排水管道检测机器人
日本横滨国立大学的Chi Zhu等人研发的排水管道检测维修机器人[10]则适用于直径为Φ200mm的管道,如图1.3所示。该机器人由行走装置、作业装置、采集装置和控制装置四大部分组成。该检测维修机器人不仅可以检测排水管道内部情况,其具有的作业装置还可以完成简单的补漏和清理工作。机器人摄像头拍摄的管道内壁图像交由主控计算机处理并定位管道漏洞的位置,经计算得出结果送到微处理器SH7050中,控制作业装置完成补漏和清理工作工作。该管道检测机器人的规格为:长620毫米、宽166毫米、高158毫米、重24千克。
英国的PEARPOINT 公司开发的轮式P350轮式排水管道检测机器人[11],如图1.4所示,其控制装置由操作人员通过操作杆进行控制,CCD云台系统由受到远程控制的电动升降机承载,以便于全方位地检测拍摄。该机器人的系统模块化设置,便于更换配件,因此较为耐用;其CCD系统的高敏性使得可以在直径小至 32mm大至900mm的管道中进行检测作业。
韩国的Young-Sik Kwon、Bae Lee等人研发的轮压式管道探测机器人[12],如图1.5所示,主要由驱动单元、采集单元和探测单元三部分组成。机器人两侧的伸缩杆可以伸长和收缩,因此在不同大小的管径中都可以使轮子紧压在管壁上,这使得这种管道探测机器人的驱动摩擦力大。该机器人整体尺寸小,重量轻,适用于直径80~100mm的微型管道环境;但在内壁不平整管道中行走不便,要求转弯半径大。
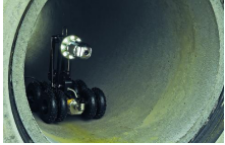
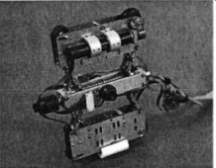
图1.4 PEARPOINT公司的P350系列机器人 图1.5 韩国轮压管道检测机器人
我国直到20世纪80年代才开始研究管道检测机器人,但也取得了不错的成果。其中哈尔滨工业大学、上海交通大学、清华大学研制出了较为适合广泛推广的管道机器人。
哈尔滨工业大学于1995年由邓宗全教授领导研究小组进行管道机器人的研究,成功研制出了我国第一台X射线管道探伤机器人[13],如图1.6所示。该机器人采用X射线对管道内部进行探测,X射线再探测到内壁裂缝时会发出不同信号,从而定位出裂缝位置。该机器人已成功应用于“陕—京”燃气输送管道工程实践中,标志着我国管道机器人由理论阶段正式进入实践阶段。
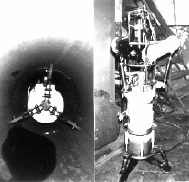
图1.6 Φ660mm管道X射线探伤机器人
2000年,在国家“863”计划的资助下,邓宗全教授领导的研究小组又成功研制出了具有内置动力源的X射线探伤机器人[14],如图1.7所示,该管道机器人引入了CCD传感器作为定位示踪传感器,且以有缆的方式供电;但是有缆供电的方式使得其工作时仍需人工进行定位,且限制了作业距离。

图1.7 内置动力源的X射线探伤机器人
上海交通大学研制出的管道检测机器人一是六轮式管道检测机器人[15],如图1.8所示,主要应用于大口径的管道腐蚀状况探测。该机器人由一个电机驱动,蜗轮蜗杆作为传动系统,带动六个行走轮在管道爬行,其能够在500mm管道中连续行驶500m左右,但缺点是缺少差动系统,无法主动转向[16];二是履带式管道检测机器人[17],如图1.9所示,该管道检测机器人采用直流伺服电机驱动、齿轮减速箱进行降速,机器人装配由CCD系统和图像传输装置,相关参数如下:
电机功率5瓦,减速箱传动比为100,输出转速0~30转/分,可通过最小管径为120毫米,运行速度约为1.2米/分。
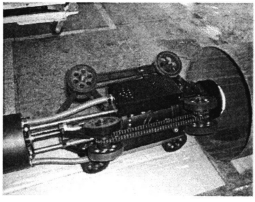
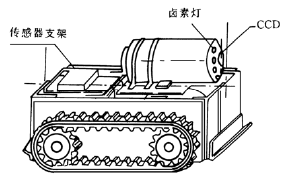
图1.8 上海交通大学六轮式管道机器人 图1.9 上海交通大学履带式管道机器人
清华大学的特种机器人小组研制了伸缩小型蠕动机器人、管道清淤机器人、小型长距离管道机器人[18],如图1.10所示。
其中,蠕动机器人采用螺旋轮作为驱动机构,适用于管径100毫米的小型管道,这种机器人与直进轮式机器人相比,采用伸缩前进方式,使结构紧凑、控制容易,但由于其采用弹簧来使其伸缩,只能适应管径变化较小的管道[19]。
此外,我国一些高校研究所和科技公司也在致力于管道机器人的研发,某些方面已位于世界领先地位;但受限于我国总体的科技发展水平,我国研制研发的这些管道机器人仍有很多不足,尤其是管道机器人的实用性和进行产业化发展等方面还有很多问题。
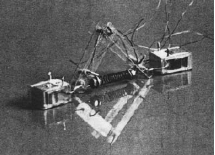

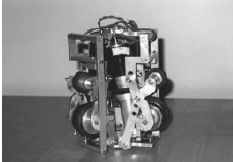

图1.10 清华大学特种机器人小组长研制的机器人
综上所述,本文首先分析了现代化城市排水管道网络的现状,排水管道面临着泄露和堵塞的风险;然而常规的人工检测方式有着排水管道检测及修复工作的繁琐,检修人员劳动强度大、易遇到危险等问题。为了解决这些问题,本文设计了一种适合在直径300mm以上的排水管道中进行检测作业的轮式排水管道检测机器人来代替人工检测。
1.3毕业设计主要内容
排水管道内环境复杂,检测机器人的运动状况尤为重要,本文主要针对运动机构进行了设计,使得管道检测机器人具有完备的驱动、传动功能,可以适应复杂的作业环境。设计主要内容如下:
- 第1章:绪论。首先介绍了轮式排水管道检测机器人运动机构设计这一课题设计研究的目的及意义,然后介绍了有关管道机器人的国内外研究现状,最后总结了论文的主要内容,为毕业设计的研究确定了方向。
- 第2章:总体方案设计。首先轮式排水管道检测机器人的功能需求进行了分析,然后根据各功能需求对比分析了实现各功能的多种方法,最后确定了轮式排水管道检测机器人运动机构的总体方案。
- 第3章:主要零部件设计计算。根据总体方案对轮式排水管道检测机器人运动机构的电机和减速箱进行选择计算,对锥齿轮、链轮链条、轴进行设计计算及强度校核,对轴承进行型号选择及寿命计算,对联轴器进行选择计算。
- 第4章:总结。归纳总结本文的研究成果。
总体方案设计
2.1功能需求分析
轮式排水管道检测机器人的总体方案的确定需要先对其要实现的功能进行分析。排水管道检测机器人是一种可在排水管道内部进行检测工作以便协助管道检修人员对管道进行维护整修的机器人。运用排水管道检测机器人进行管道检测可以提高检测的准确性,提前发现问题所在以降低维修成本以及降低管道勘测工作的繁复性、危险性、困难性。轮式排水管道检测机器人具有强劲的动力性能、越障能力优越,即使在复杂的管道条件下也能发挥其作用。
排水管道检测机器人要对排水管道内部进行检测,以找到裂缝、腐蚀或堵塞等问题;因此其最重要的功能是检测功能。其次,管道检测机器人要在复杂的排水管道中进行作业需要具备相应的驱动、传动功能从而可以在排水管道内部进行运动。另外排水管道机器人还需要具有相应的运动检测功能,即对其运动的状态进行检测:首先当排水管道机器人的检测系统发现管道内部某处有堵塞、裂缝等问题后,会向地面接收装置传输信息,在地面控制系统的作用下,机器人停下运动,此时需要对机器人停止的位置进行检测以便确定问题所在范围。然后,为保证定位准确,需要管道机器人在已检测确定的位置处固定,固定检测功能的作用就是保证机器人已完全停止运动。最后,需要定位检测功能将管道内问题所在的具体位置进行确定。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: