机械式枣果采收辅助小车毕业论文
2020-02-13 16:20:55
摘 要
目前我国果树种植行业在生产过程中主要依靠人工采摘,机械化水平低,生产效率低,越来越不满足我国人民日益增长的需求,两者之间产生的矛盾推动了我国林果采摘的机械化进程。本文以红枣为例查询相关资料,了解了红枣的种植特点及采摘特性,研究分析了辅助小车工作原理,最后针对南疆地区的红枣采收作业环境提出了机械式枣果采收辅助小车的设计要求。根据该设计要求,完成了适合特定枣树采收的辅助小车的整体结构设计,并对振动采收机理和机架等关键部件进行了分析和探讨。本文的主要研究内容如下:
(1)机械式枣果采摘辅助小车采摘机理研究。在网上查询资料及老师的帮助后,对矮化密植红枣的种植方式有所了解,其次也从资料上查询到果柄分离所需激振力的大小,为设计整机结构提供了参考;通过分析枣果和果柄的分离状态,以及树干振动的振动运动的表达式,得到振动装置的设计满足的条件是是由振动装置产生的激振力所引起的枣果的惯性力要大于枣果本身的拉断力。
(2)机械式枣果采收辅助小车设计。依据查阅到的红枣的种植方式,确定了机械式枣果采收辅助小车的整机结构、技术参数。对激振装置、夹持振动装置、机架、枣果收集装置,进行了设计。其中激振装置采用伺服电机驱动,通过控制滑杆的往复运动实现振动。
(3)辅助小车的三维建模及仿真。应用Solidworks软件建立辅助小车各主要零部件的三维实体模型,并通过各部件之间的配合,完成模型的装配,得到辅助小车的装配模型。
关键词:矮化密植;红枣收获;结构设计与仿真;
Abstract
At present, the fruit tree planting industry in China mainly relies on manual harvesting in the production process. The mechanization level is low and the production efficiency is low. The contradiction between the two has promoted the mechanization process of fruit harvesting in China. Taking jujube as an example, this paper inquires about the relevant information, understands the planting and picking characteristics of jujube, studies and analyses the working principle of assistant cart, and finally puts forward the design requirements of mechanical assistant cart for jujube harvesting according to the working environment of jujube harvesting in southern Xinjiang. According to the design requirements, the overall structure design of the auxiliary cart suitable for specific jujube harvesting was completed, and the vibration harvesting mechanism and the key components such as the frame were analyzed and discussed. The main contents of this paper are as follows:
(1) Study on the mechanism of mechanical jujube picking assistant trolley picking. After inquiring the information on the Internet and the help of the teacher, we have some knowledge about the planting mode of dwarf and dense jujube planting, and then inquire the magnitude of the exciting force needed for the separation of fruit stalks from the data, which provides a reference for the design of the whole machine structure. Vibration is obtained by analyzing the separation state of fruit and fruit stalks and the expression of the vibration motion of the tree trunk. The design of the device satisfies the condition that the inertia force of the jujube fruit caused by the exciting force generated by the vibration device is larger than the pulling force of the jujube fruit itself.
(2) Design of mechanical jujube harvesting assistant trolley. The structure and technical parameters of the mechanical jujube harvesting assistant trolley were determined according to the cultivation mode of jujube. The excitation device, clamping vibration device, frame and jujube fruit collecting device were designed. The excitation device is driven by servo motor, and the vibration is realized by controlling the reciprocating motion of the slider.
(3) Three-dimensional modeling and Simulation of the assistant car. Solidworks software is used to build the three-dimensional solid model of the main parts of the auxiliary car, and the assembly model of the auxiliary car is obtained through the coordination of the parts.
Key words: Dwarfing and close planting; Jujube harvesting; Structural design and simulation
目录
第1章 绪论 1
1.1研究的目的和意义 1
1.2国内外研究现状 1
1.3研究内容 4
1.4技术路线 4
第2章 机械式枣果采收辅助小车采摘机理分析 5
2.1矮化密植红枣种植特点 5
2.2果实分离条件分析 5
2.2.1树干振动分析 5
2.2.2红枣脱落条件分析 7
2.3机械式枣果采收辅助小车典型工况分析 8
2.4本章小结 8
第3章 机械式枣果采收辅助小车的设计与分析 9
3.1设计要求 9
3.2机械式枣果采收辅助小车整体结构设计及工作原理 9
3.2.1整体结构设计 9
3.2.2工作原理 10
3.3激振结构的设计 10
3.3.1激振装置的设计技术要求 10
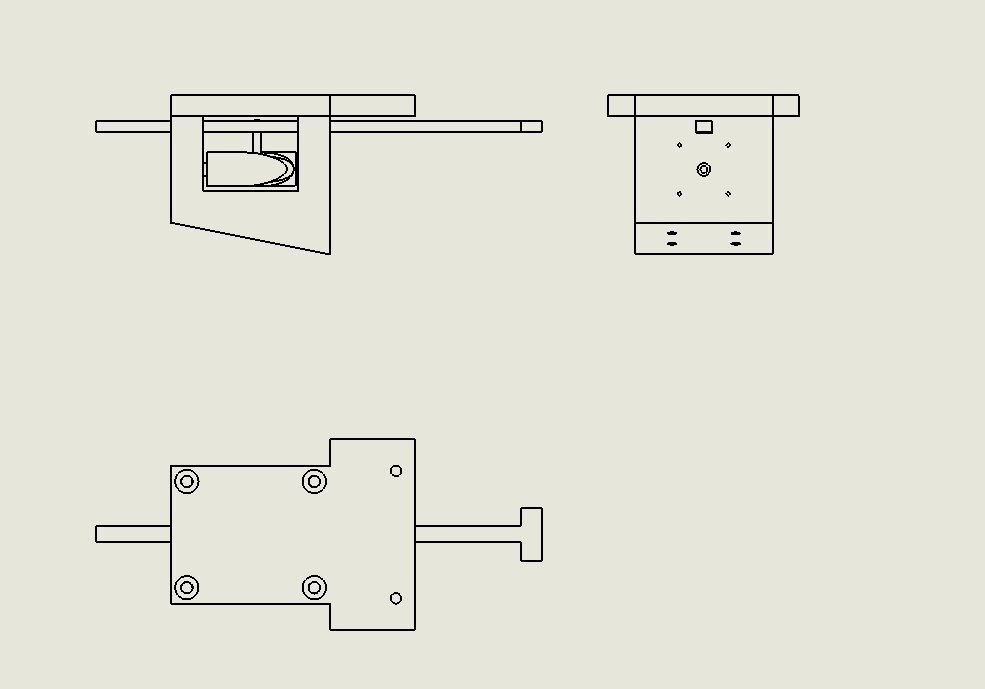
3.3.2激振装置的基本结构 11
3.4夹持机构设计 12
3.4.1夹持机构设计要求 12
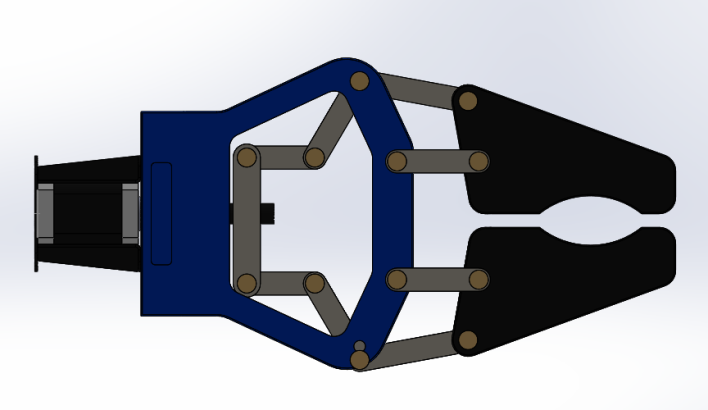
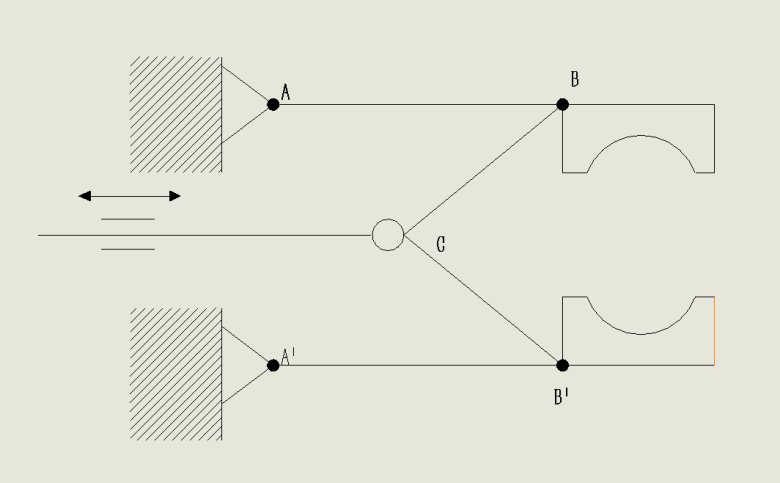
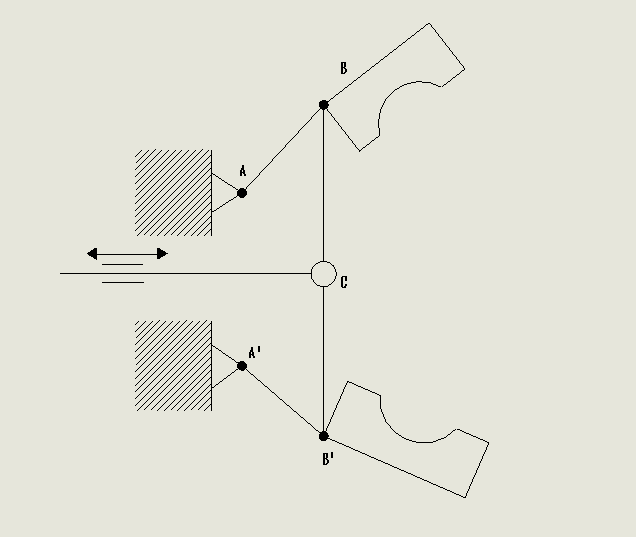
3.4.2夹持机构设计 12
3.5机架的设计 14
3.6枣果收集装置的设计 15
3.7本章小结 16
第4章 枣果采收辅助小车建模与仿真分析 17
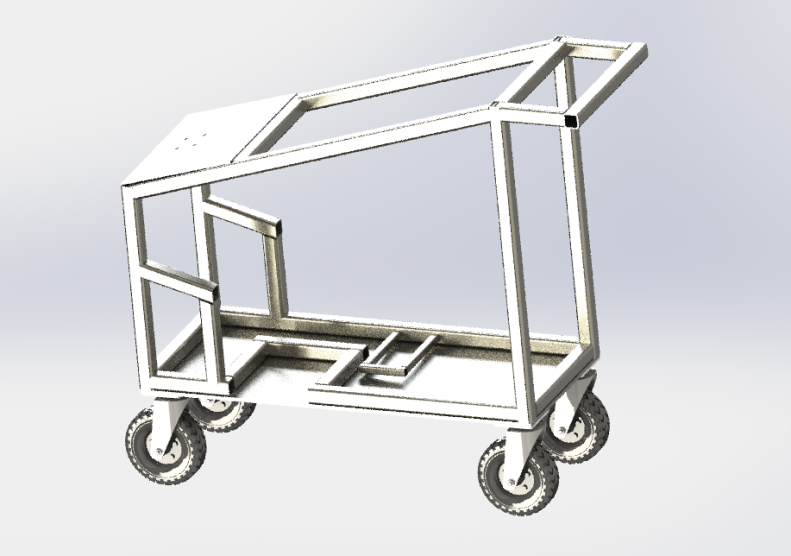
4.1机械式枣果采收辅助小车三维建模 17
4.1.1基于机械式枣果采收辅助小车特征的零件设计 17
4.1.2机械式枣果采收辅助小车的装配设计 17
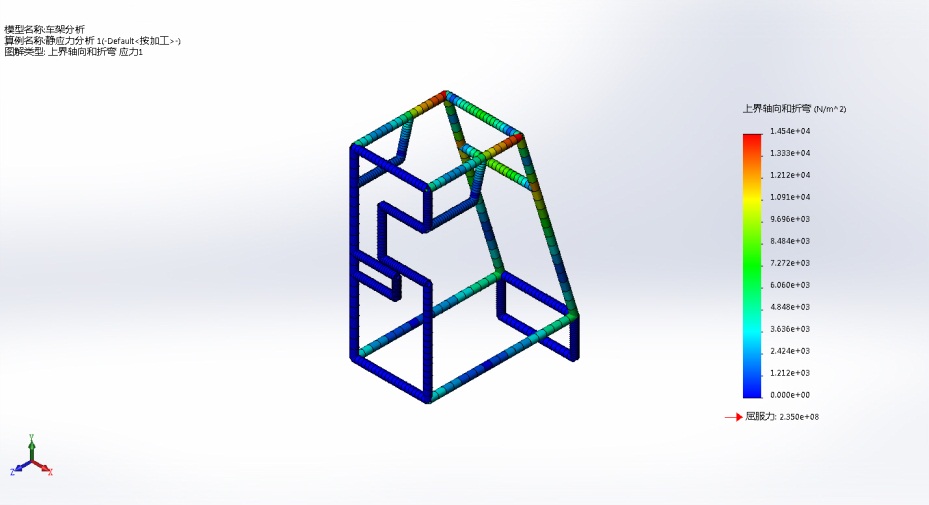
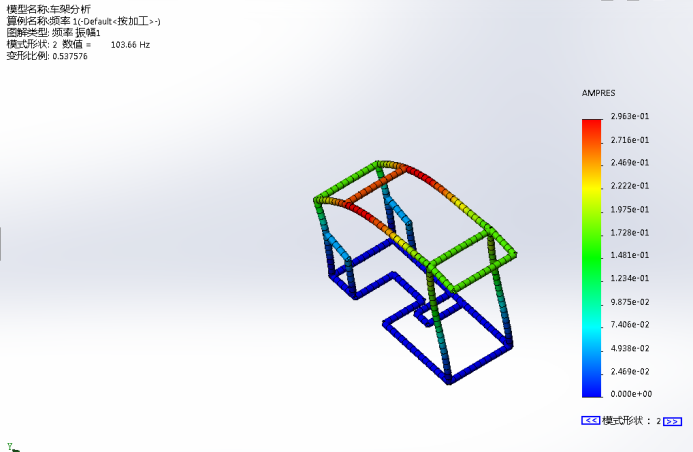
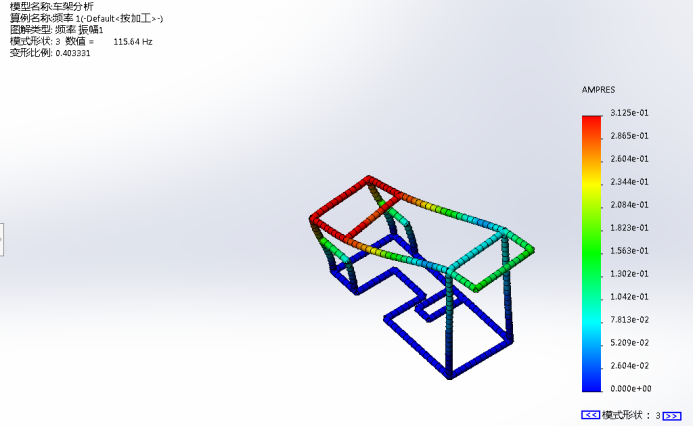
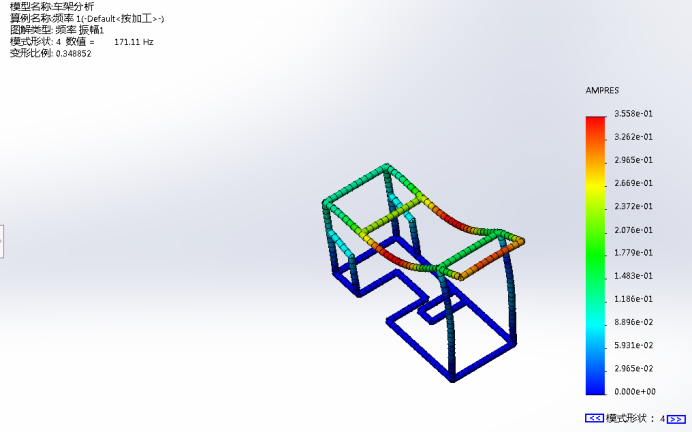
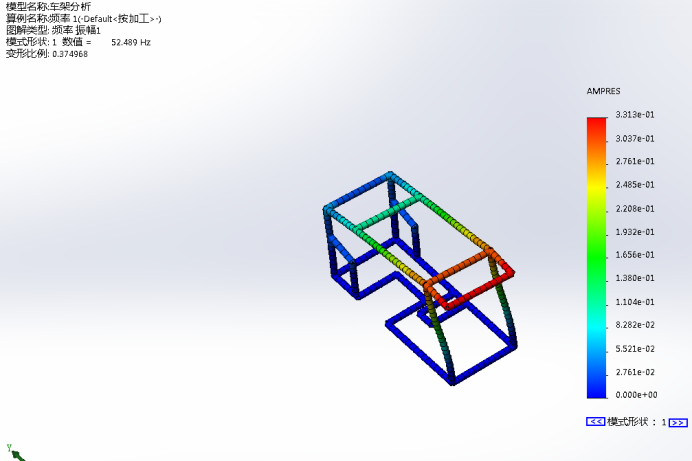
4.2 机架有限元分析 18
4.2.1 机架静态算例分析 19
4.2.2 机架模态算例分析 19
4.3本章小结 20
第5章 总结与展望 21
5.1结论 21
5.2今后的工作及展望 21
参考文献 22
致谢 23
第1章 绪论
1.1研究的目的和意义
农业自古以来就是中国的主要产业,在我国历史上发挥着举足轻重的作用,而林果种植业在农业中占有重要的地位,特别是改革开放以来,随着中国经济的不断发展,人民对于林果的需求激增,我国林果种植的规模和产量也不断扩大。枣果作为林果的一种,自古以来就在中华大地广泛种植,同时枣树亦于种植,一般来说,冬季最低气温在-32℃以上即可成活,现今枣树种植在我国各地发展都很快,特别版式南疆红枣的大规模发展,引人注目。由于经济的发展和特色农业的建立,红枣种植业已经成为现代农业产业的一项新的产业工程。但同时我们也应该清晰的认识到,人工采果效率低下,而且容易毁坏枣树及大枣,已远远不能满足农民的需要,对农民的经济收入造成一定的损失,也使大枣的种植效益很不理想。因此,随着枣树种植业需求的机械化水平日益提高,这一过程反过来促进枣树生产方法和加工采收设备的更新。

图1.1 红枣果园种植图
1.2国内外研究现状
传统的采收和种植生产方式从根本上讲是低效率的,既费时又费钱,不利于大枣种植业扩大产量和农民进行采收和销售大枣。而且,林果生长过程的诸多因素,例如果壳的软硬,树干的粗细,果叶的茂盛程度等都制约着采摘机械的研发。然而,因为目前林果业的对高效采摘机械的迫切需求和国家政策的倾斜,开发研制出高精度、高强度、高效率的自动化林果采摘设备已经势在必行。
振动采摘机主要通过外部振动将果树与果实分离。该方法能快速、有效地对成熟果实进行采摘和果叶分离,适用于规模化、产业化的林果收获。振动采摘机的工作原理是通过特定的激振结构将机械振动传递给果树,迫使果树以一定的频率和振幅振动,使果枝上的果实在某种形式的振动作用下得到加速,同时需要惯性力使其保持静止。当果实惯性力大于果实与枝条之间的结合力时,果实在果实与枝条连接的最薄弱点处断裂,完成了果实分离过程。


(a) (b)
图1.2 (a)人工采摘红枣 (b)机械化采摘红
自上世纪60年代开始,国外就开始对振动采收机械机理进行了研究。美国作为世界上头号科技强国,也是最早研制振动采摘机械的国家,其研制的采摘机械最早在杉树上进行过实验,虽然试验结果表明,振动机械确实可以将林果从树上振落,但因为当时技术的限制,该振动机械很容易导致树木死亡,造成极大损失。自80年代美国西部果园使用后发现,该采摘机械作业效率和效果均不太理想,因而其商业化的推广迟迟没有结果,而且外国机械采摘果实主要是较为普遍的苹果,核桃,油果之类的硬皮果实,采摘机械较为粗糙即可,并没有针对性的,采摘优良的采摘机械。
![Q][MMQ~~ZK~ZFZL[EY0MSAH](http://www.biyelunwen.org/wp-content/uploads/2020/02/lw104_2020213161839976.png)

图1.3自走式红枣收获机
我国大枣种植业采用的模式一般为个体户或者几家几户的小果园模式,不适用与大型采摘机械,人工采摘即满足市场需求,然而现今市场对林果需求激增,且我国人口红利的时代刚刚过去,这促使我国开始对机械式采摘器展开研究。从20世纪70年代开始研究机械化采摘器,早期主要通过仿制国外先进的林果机械式枣果采收辅助小车械,进而慢慢改进研制出符合当地地理特点的农业机械。到80年代后期,随着我国对于切割型采摘器的进一步研究,我国水果种植业逐渐采用切割式机械辅助装置代替人工打果,收集果子,同时为了针对不同高度的果树使机械适应不同环境要求,陆续有了更多的辅助装置,比如多功能辅助小车,用于针对不同地形的果园,便于采摘作业。
进入新时代以后,我国科技蓬勃发展,极大的促进了林果机械式枣果采收辅助小车械的发展,我国水果采收机械行业不仅在量上追赶国外先进机械化水平,在功能上也逐步走向世界前列。2007年新疆自治区农机局组织、新疆机械研究院研制开发出的国内第一台多功能果园作业机(LG-1型多功能果园作业机),标志着我国开始在果实采摘机械化方面开始赶上世界,开始由单一的机械式采摘机械进入到了多功能作业机械时代。在2009年国内也出现了单人作业的枸杞采摘器,这也说明我国水果采摘器在小型化方面同样取得了部分成绩。2010年新疆农垦科学院机械装备研究所研制出4YS-24型红枣收获机,极大的提高了大枣采摘的效率和果实的采净率,促进了枣果种植行业的发展,也极大地提高了农民种植大枣的积极性。2012年新疆生产建设兵团农业机械重点实验室研发的4FZ-30型自走式番茄收获机为番茄收获机的国产化奠定了基础。而我国南方地区的大部分作物都位于丘陵和山区,由于地形的原因,大型机械化采摘机械并不适用,而小型机械化采摘工具在我国仍然只有少量研究。因而在这方面,研究仍大有可为,需要更多的研究机构和企业进行相关研究。
因此,提高果实收获机械的采摘效率和降低工人的劳动强度和危险系数,提高林业经济效率和降低成本是现代水果行业发展过程的关键。振动采摘技术是一种简单、高效、效果显著的机械采摘技术。它能有效地提高采摘效率,降低采摘成本。在一定程度上解决了果农的劳动强度大、时间多和劳动效率低的问题。因此,对机械式枣收获辅助小车的研究,不仅可以极大地促进振动收获技术的发展,而且可以极大地促进现代林果业经营模式的转变。与此同时,现代果林产业向规模化、标准化方向发展,机械化、自动化作用日益突出。因此,振动式水果收获辅助小车将具有广阔的应用前景。
1.3研究内容
本文基于南疆红枣特色的矮化密植模式的应用场景,设计了一种结构紧凑,作业空间小的机械振动式红枣采收辅助小车,在一定程度上解决了枣树采收过程中果农的劳动、时间和劳动消耗问题。该辅助小车从以下几个方面进行研究:①研究果实的采摘机理,以便于合理设计辅助小车;②设计合理的辅助小车整体结构如激振装置、夹持装置等结构,并建立三维模型,通过配合来修改部分结构;③对机架的机构进行仿真分析,研制机架设计是否合理。
1.4技术路线
明确研究任务
枣果收集装置设计
理论分析与仿真
枣树特性研究
分析国内现有技术特点
方案论证
初步设计方案
网上查阅资料
结构分析与修改
机架结构设计
激振,夹持结构设计
第2章 机械式枣果采收辅助小车采摘机理分析
2.1矮化密植红枣种植特点
查询网上资料可知新疆红枣生产主区大多采用三种密度种植模式:密植园;中密植园;高密植园。矮化密植枣树树型为开心型,树高2.0m,干高60-80cm,主干上生三个主枝,主枝间水平夹角120°,主枝张开角40-50°,没有中心领导干。每个主枝配备2-4个侧枝,其余枝条培养出辅养枝。此树型树枝较小,结构简单,容易整形,通风特性良好,便于管理。如图2-1所示。
009
2000
图2.1 红枣种植模式
2.2果实分离条件分析
2.2.1树干振动分析
机械式枣果采收辅助小车在作业过程中,振动状态下的机械式枣果采收辅助小车与果树一起构成了一个多自由度的振动系统。然而多自由度的振动系统分析太过复杂,本科期间没有能力进行相关分析,因而在忽略相关因素的条件下,将该多自由度振动系统简化为单自由度的振动系统,如图2.2,图2.3所示
F
C
K
图2.2 果树振动系统模型图
X
Y
0O
A
wt
图2.3 采摘机-果树振动模型
直接作用在树干的力所引起的受迫振动的单自由度系统在外力F作用下的运动方程为:
(2-1)
式中:c 为系统粘性阻尼系数,N·s/m;k为刚度系数,N/m;为系统的激振力,即系统的输入;为系统的输出。
根据振动力学分析可知x方向上,果树做有阻尼的自由振动,但由于外界的激振力为零,果树始终处在平衡位置,也就不会产生振动时的惯性力和恢复力,所以果树在X方向处于静止状态。
在y方向上对式(2-1)进行拉普拉斯变换,可得系统传递函数为
(2-2)
令s=jw,带入式(1-2),可得
(2-3)
当激振力时,系统的稳态时的频率响应函数为
(2-4)
其中幅频特性A(jw)和相频特性phi;(jw)分别为
(2-5)
(2-6)
式中:w是激振力频率;是系统的固有频率,;是系统的阻尼率。
在幅频曲线上幅值最大处的频率称为位移共振频率,他和系统固有频率的关系是
(2-7)
由此可见枣树树干的运动是一种简谐振动,当系统的阻尼率小时,位移振动频率与激振频率相同。
2.2.2红枣脱落条件分析
红枣受到树干的激振力后,会受到力的作用,使其掉落。单个红枣枣果受到自身的重力,树枝和枣果之间的结合力,以及自身保持原本运动的惯性力。在三者的作用下,建立枣果的受力分析图,如图2.4所示,要是枣果掉落,必须满足作用在切向力和自身重力的切向力的合力大于树枝和枣果之间的结合力。
图2.4 红枣受力模型
查阅资料后得 (2-8)
从式2-8中可以看出,影响果实振动脱落的主要因素有激振装置的振动频率,振动幅度和振动时间。果树振动频率越高,振动幅度越大,产生的惯性力越大,枣果越容易掉落,但过高的频率和振幅会影响果树的寿命,其次振动时间选择得合理,过长或过短均不利于激振装置的工作效果。
2.3机械式枣果采收辅助小车典型工况分析
根据初步设计的机械式枣果采摘辅助小车方案,对该装置的几个典型工况分析如下:
(1)夹持装置工作过程
将机械式枣果采收辅助小车停至适当的位置后,夹持装置将树木固定,人工打开枣果收集装置。
(2)激振装置工作过程
打开电机,电机驱动圆柱凸轮机构旋转产生激振力,通过滑杆将振动力传至树干,迫使果实降落,同时取出打枣杆,人工进行辅助打枣,使枣果收集更彻底。
(3)枣果果叶分离工作过程
打开风机,通过控制风速将枣果和枣叶进行分离。图2.5为机械式枣果采收辅助小车工作流程。
图2.5摘机工作流程图
2.4本章小结
(1)查询网上资料,对矮化密植红枣的种植特点进行了说明,得到了机械式枣果采收辅助小车设计时参考的相关数据。
(2)对红枣果实分离条件进行了分析和说明,从树干振动分析和枣果掉落条件分析两方面入手,分别得到相应的运动方程和数学模型。
(3)对机械式枣果采收辅助小车的典型工况进行分析,介绍了机械式枣果采收辅助小车的工作流程。
第3章 机械式枣果采收辅助小车的设计与分析
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: