基于车速的农作物施肥装置的控制系统设计毕业论文
2020-02-17 19:58:30
摘 要
农作物作为中国农业最重要部分,其产量与广大人民的生存需求息息相关。自古至今,农作物便成为了农业重要的支柱,纵观历史,农作物的产量是国民经济的基础,社会稳定和粮食安全的基础。农作物不仅包括着人们赖以生存所需要的食物,还包括这畜牧业所需要的肥料,因此农作物的产量就显得至关重要。
施肥量是决定农作物产量的关键因素,合理科学地施用化肥能够保证农作物增产、提高农作物品质。相反,过量不合理地施肥不仅无法发挥肥料对农作物生产的积极作用,还会带来环境风险,造成土壤板结、水源污染,从而降低农作物质量。为使化肥的用量达到合理的阈值,现代农业引用变量施肥,该技术可以很好的提高化肥的利用率,减少肥料的浪费以及对环境的污染。其中,变量控制系统是变量施肥技术的核心,变量控制系统是基于处方图进行变量施肥的,通过实时查询当前机具的经纬度以及速度,得出当前机具所在的处方图中的网格,然后查询该网格的施肥量,最后控制步进电机进行变量施肥。此过程是基于GPS的,处方图不易获取,技术成本较高,普及性较差。因此,本文采用基于车速变化的施肥控制系统,通过对变量控制系统做出一点改进,来实现控制施肥量。
本文设计的基于车速的农作物施肥装置的控制系统,其主要内容如下:
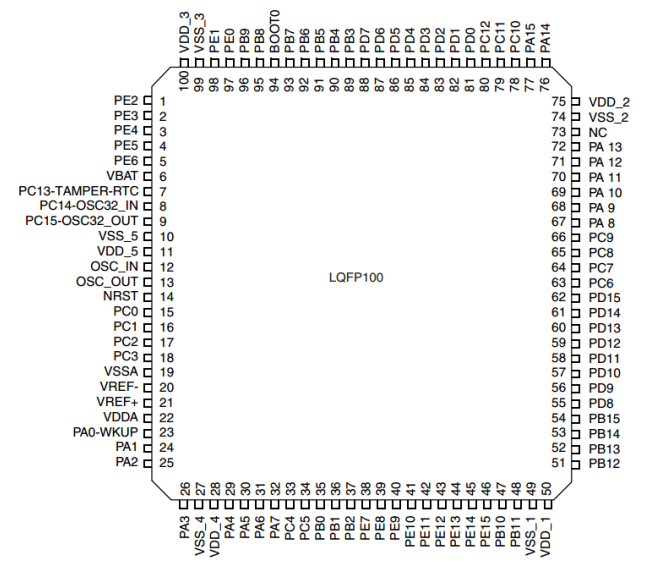
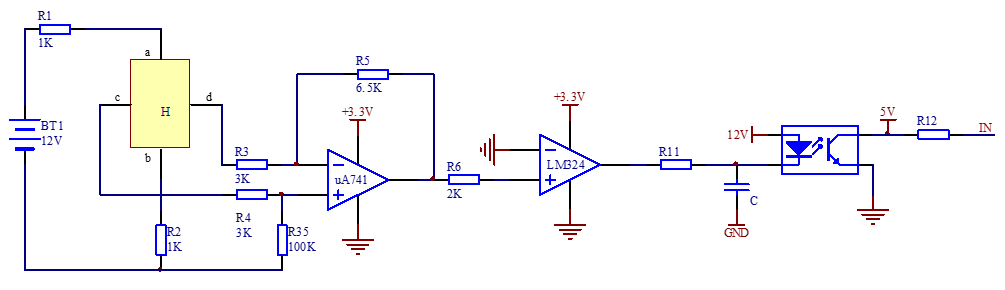
(1)控制系统硬件设计。包含了对整个系统的元器件选型,选择了STM32F103ZET6的芯片作为控制器核心,对速度检测传感器以及肥料检测传感器进行电路设计,以装载本文设计的施肥控制系统。
(2)控制系统软件设计。包含施肥电机驱动模块程序设计,机具速度传感器检测模块程序设计,肥料检测传感器模块程序设计以及参数显示设定模块程序设计,以实现施肥量是基于车速的控制系统。
(3)控制系统显示器设计。包括参数显示设定模块的程序构建,时间显示模块的程序构建等,达到了整体要求,以实现施肥参数自由设定的目的。
通过对整个控制系统进行检验,其结果表明:人机交互界面能够正常的显示参数以及参数输入,速度传感器能够精准的实时检测车速,肥料检测传感器也能够准确检测有无肥料,施肥步进电机能够正常的根据车速发生变化,对施肥量实时控制。
关键词:精准施肥;变量施肥;控制系统
ABSTRACT
As the most important part of Chinese agriculture, crops are closely related to the survival needs of the people. Since ancient times, crops have become an important pillar of agriculture. Throughout history, crop yields are the foundation of the national economy, the basis of social stability and food security. Crops not only include the foods people need to survive, but also the fertilizers needed for this animal husbandry, so the yield of crops is crucial.
The amount of fertilizer applied is the key factor determining the yield of crops. Rational and scientific application of chemical fertilizers can ensure the increase of crop yield and the quality of crops. On the contrary, excessive and unreasonable fertilization can not only exert the positive effect of fertilizer on crop production, but also bring environmental risks, causing soil compaction and water pollution, thus reducing the quality of crops. In order to achieve a reasonable threshold for the use of chemical fertilizers, modern agricultural citing variable fertilization, this technology can improve the utilization of fertilizers, reduce fertilizer waste and environmental pollution. Among them, the variable control system is the core of the variable fertilization technology. The variable control system is based on the prescription map for variable fertilization. By querying the latitude and longitude and speed of the current implement in real time, the grid in the prescription map of the current implement is obtained, and then the query is made. The amount of fertilizer applied to the grid, and finally the stepper motor is controlled for variable fertilization. This process is based on GPS, the prescription map is not easy to obtain, the technical cost is high, and the popularity is poor. Therefore, this paper adopts a fertilization control system based on vehicle speed change, and achieves a controlled amount of fertilizer by making some improvements to the variable control system.
The control system of the vehicle speed-based crop fertilization device designed in this paper is as follows:
(1) Control system hardware design. Including the selection of the components of the whole system, the chip of STM32F103ZET6 was selected as the core of the controller, and the circuit of the speed detection sensor and the fertilizer detection sensor was designed to load the fertilization control system designed in this paper.
(2) Control system software design. It includes the fertilization motor drive module program design, the tool speed sensor detection module program design, the fertilizer detection sensor module program design and the parameter display setting module program design to realize the fertilizer application rate based on the vehicle speed control system.
(3) Control system display design. The program construction including the parameter display setting module and the program construction of the time display module achieve the overall requirements for the purpose of freely setting the fertilization parameters.
Through the inspection of the entire control system, the results show that the human-computer interaction interface can display parameters and parameter input normally, the speed sensor can accurately detect the vehicle speed in real time, the fertilizer detection sensor can also accurately detect the presence or absence of fertilizer, and the fertilization stepper motor can The normal change according to the speed of the vehicle, the real-time control of the amount of fertilizer applied.
Key Words : precision fertilization; variable fertilization; control system
目 录
第1章 绪论 1
1.1目的及意义 1
1.2国内外研究现状 1
1.2.1 国内研究现状 2
1.2.2 国外的研究现状 5
1.3本文的研究内容及结构框图 7
1.3.1 本文的研究内容 7
1.3.2 研究内容的结构框图 8
第2章 施肥控制系统的需求分析 9
2.1 施肥控制系统需求 9
2.2 工作原理和系统构成 9
2.3 元器件选用 11
2.3.1传感器选用 11
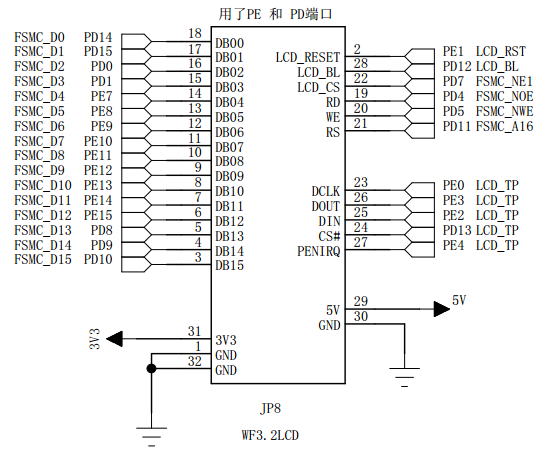
2.3.2液晶触摸屏选用 11
2.3.3控制芯片的选用 12
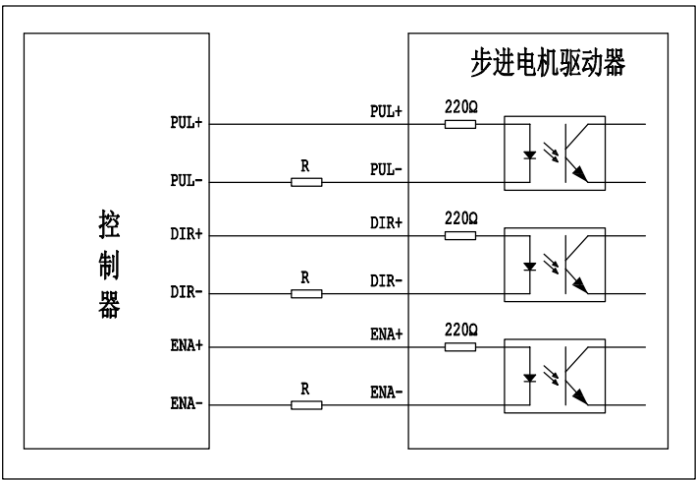
2.3.4步进电机驱动器选用 13
第3章 施肥控制系统硬件设计 14
3.1硬件总体设计 14
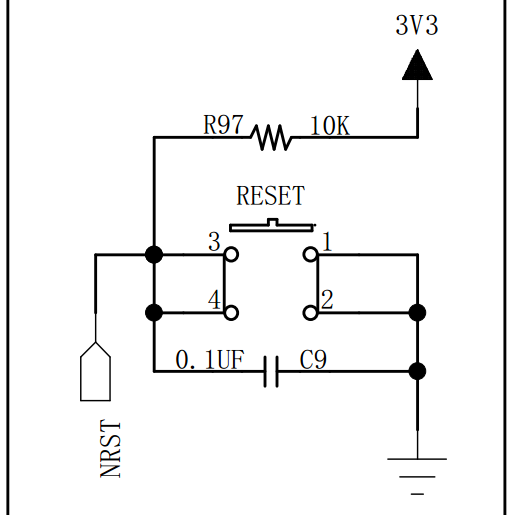
3.2控制器硬件电路设计 15
3.3检测模块电路设计 17
3.4参数显示与设定模块电路设计 18
3.5施肥步进电机电路设计 19
3.6电源电路设计 20
第4章 施肥控制系统软件设计 21
4.1软件总体设计 21
4.1.1软件设计流程 21
4.1.2软件设计平台 22
4.2参数显示与设定模块设计 23
4.2.1液晶显示驱动设计 23
4.2.2液晶触摸驱动设计 24
4.3步进电机驱动设计 28
4.4车速检测模块设计 30
4.5 肥料检测模块设计 31
第5章 施肥参数显示器设计 33
5.1设计方案 33
5.1.1 显示器设计流程 33
5.1.2 显示器设计方案 34
5.2方案一 34
5.2.1工作原理 34
5.2.2显示器设计—方案一 35
5.3方案二 37
5.3.1工作原理 37
5.3.2显示器设计-方案二 38
5.4方案选定 39
第6章 总结和展望 41
6.1总结 41
6.2展望 41
参考文献 42
附录 44
致谢 110
第1章 绪论
1.1目的及意义
目前我国农业发展相对落后,自动化程度不高,加上青壮年劳动力外出,造成农村需要大量的劳动力。由自动化程度不高带来的问题就是农业生产效率不高。而且我国是一个农业大国,农村人口占绝大多数,农业对我国经济来说也是必不可少的一大支柱。中国人多地少,人均资源相对紧缺。同时,随着人口的日益增长,水资源和土地资源更加面临着严峻的挑战,人均耕地数量呈现明显的下降。在过去的几十年里,农业发展不仅一直处于发展较为缓慢的状态,还面临着环境污染的问题,而且与发达国家来比,化肥的利用率,土地资源的利用率都明显的低下,面对发达国家先进的农业设备所带来的劳动效率和粮食产量,我国也有必要充分的利用这些设备,来改善我国农业目前所面临的状况。而农作物作为农业中的一个重要部分,农作物的产量关乎着人民的饮食问题,在相对偏远落后地区,农作物的施肥采用的是农民直接手动施肥。这样的施肥方式加大了务农人员的增多,而且效率不高,劳动力消耗的太大。除此之外,人工施肥很难保证施肥量的大小,完全凭经验的施肥容易造成农作物施肥不均匀,进而造成农作物的产量的不稳定性。再者,施肥的多少对环境也是一个严峻的问题。因此对化肥的利用程度成为人民关注的重点。然而如何解决化肥的使用量这一个问题,已经由发源于美国的精准农业去解决。
精准农业(Precision Agriculture)也就是利用定位系统(GPS),遥感技术(GIS)以及地理信息系统(GIS)等技术,根据土壤的状况以及农作物的生长状况,来实时的调节不同土地上农作物的生长,来保证农作物的健康生长。精准农业已经实现对土地的完全利用,使得土地能够在同等条件下发挥更高的产能。精准农业不仅高效地利用资源,而且也减少了对环境的污染。变量施肥技术又作为精准农业的重要部分之一,主要是指把变量技术应用到农作物的施肥过程中去,使得施肥量根据不同土地不同情况进行变化,以达到化肥的充分利用的。
为了能够解决我国传统施肥的效率不高、人工施肥不均匀,肥料浪费等问题,本文设计了一种基于车速的农作物施肥装置的控制系统,该控制系统以STM32单片机为控制核心,附加步进电机、液晶触摸屏、速度传感器和霍尔传感器,提高了施肥的均匀性。该控制系统具有实用性强、控制精度高及智能化程度高等显著特点。对于解决我国目前存在的农作物施肥问题有着重要的作用。
1.2国内外研究现状
变量施肥技术也称为精准施肥技术,是指将土地进行网格化划分,根据不同网格土地的土壤性质,病虫灾害等,建立农作物的生长模型以及专家营养系统,以达到农作物的高产以及环保的目的。变量施肥的控制系统分为两种模式,一就是实时控制施肥,根据当前机具所处在的网格,检测当前网格的土壤情况,进行实时的调整施肥量,或者是根据实时检测到的农作物的生长状况进行实时的施肥。二就是处方图控制施肥,根据GPS信息检测当前的位置,并调取处方图中对应位置的施肥信息,以达到变量施肥的目的。这种方式也是国内外研究最多的一种,但是目前这种方式的技术难度较大,成本较高,不适合我国农业设备刚刚起步的状况,这种方式在我国好需要一定的发展时间。
1.2.1 国内研究现状
施肥装置是为了方便人们对农作物进行施肥的一种机器结构,它能够提高施肥的效率,减少人们的劳动量。但是,施肥装置还不能达到精准施肥,对于一些肥料量的控制大小存在一定的缺陷,不是很完善。因此,要设计一个控制系统,来对施肥进行控制,来以此达到最终的目的。我国对施肥装置的控制系统存在着如下的研究。
贵州大学的罗莉、张富贵等人设计了一种基于无GPS定位的变量施肥控制系统。该施肥控制系统以可编程逻辑控制器PLC为核心,包括测速传感器,单片机,步进电机和触摸屏等部分组成,分为手动模式和无GPS模式。在手动模式下,当人们到达要进行施肥的土地时,在触摸屏上选择相应的需要施肥的参数,之后就可以进行施肥。在无GPS的模式下,单片机通过传感器检测到的施肥机的速度,来控制步进电机的转速从而达到变量施肥的目的。该机构经过试验检验后,施肥机的排肥误差可以控制在4.13%的范围内,可以说是非常精准了[1]。如下图1.1所示,是该机构的工作原理图。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: