机械手操作机提升机构设计毕业论文
2020-02-17 20:24:27
摘 要
本文先从机器人国内外的研究现状着手,研究发现四大机器人家族的机器人研究纷纷转型,而国外主要研究的方向是仿生机器人。国内的研究比国外慢一点,但研究方向也是全面开花的,并且在仿生机器人领域也在不断追赶外国研究者。
对于机械手操作机提升机构设计,本文先是从运动需求开始对机构进行研究,然后选择伺服电机作为动力源,以此来提高运动的精确性和稳定性。然后利用SolidWorks来进行模块化设计,从零部件的定位要求以及连接要求开始,一步步设计平台,导轨滑块,连杆,滚珠丝杠等零部件,按照顺以一定的独立性设计了机械手操作机的提升机构的不同零部件。然后考虑零件的固定安装以及运动相关参数的测量,设计整体结构的基座。考虑安全性,设计提升机构的平衡装置。最后设计提升机构的控制系统。
设计完大致的外形后便开始设计计算,对一些标准件进行选型,对一些零件的能力进行校核,最终设计出了一种利用伺服电机为动力装置,以滚珠丝杠螺母副为主要传动装置的机械手操作机提升机构。
关键词:机械手操作机;提升机构;建模;控制系统
Abstract
This paper starts with the research status of robots at home and abroad, and finds that the research of robots in the four major robot families has been transformed, and the main research direction abroad is bionic robots. Domestic research is slower than abroad, but the research direction is also full-fledged, and the field of biomimetic robots is also constantly catching up with foreign researchers.
For the design of the manipulator operating mechanism lifting mechanism, this paper shows that the mechanism is studied from the motion demand, and then the servo motor is selected as the power source to improve the accuracy and stability of the motion. Then use SolidWorks to carry out the modular design, starting from the positioning requirements of the components and the connection requirements, step by step design of the platform, rail sliders, connecting rods, ball screws and other components, designed according to a certain independence of the robot operation Different parts of the lifting mechanism of the machine. The base of the overall structure is then designed taking into account the fixed mounting of the part and the measurement of the motion-related parameters. Consider the safety and design the balancing device of the lifting mechanism. Finally, the control system of the lifting mechanism is designed.
After designing the approximate shape, the design calculation is started. Some standard parts are selected, and the capabilities of some parts are checked. Finally, a servo motor is used as the power unit, and the ball screw nut pair is used as the main drive. The robotic actuator lifting mechanism of the device.
Key Words:Robot operating machine; lifting mechanism; modeling; control system.
目 录
第1章 绪论 1
1.1 国外研究现状 1
1.1.1 国外企业研究现状 1
1.1.2 国外学术领域研究现状 2
1.2 国内研究现状 4
1.2.1 机器人国内企业研究现状 4
1.2.2 机器人国内学术领域研究现状 4
1.3研究的目的与意义 5
1.4 设计研究的基本内容和预期目标 5
1.4.1 研究设计是流程与安排 6
1.4.2 研究设计的目标 6
第2章 机械手操作机提升机构的设计方案 7
2.1 机械手操作机的作业环境分析 7
2.2 机械手操作机结构方案设计与选择 7
2.2.1 三种结构方案的初步设计 7
2.2.2 方案选择 8
2.3 总体机械传动方案设计 8
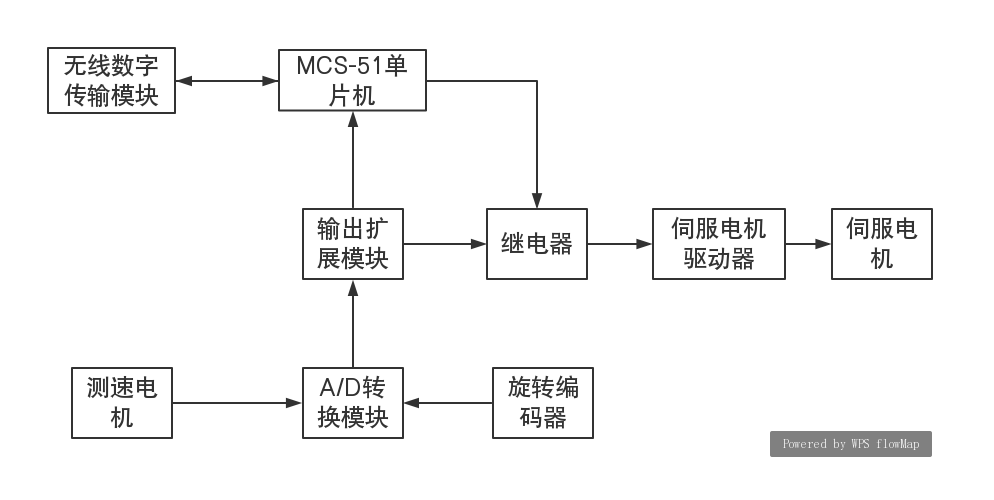
2.4 机械手操作机提升机构控制系统方案设计 9
2.4.1 控制系统硬件方案选择 9
2.4.2 控制系统原理 10
第3章 主要零部件的设计计算 11
3.1 工作台尺寸及负载重量估算 11
3.2 滚珠丝杠副的设计计算 11
3.3确定滚珠丝杠副支承用的轴承代号,规格 17
3.3.1滚珠丝杠螺母副支承方式的选择 17
3.3.2 所用轴承的选择 17
3.3.3 推力角接触球轴承的组配方式 17
3.3.4 滚动轴承的当量动载荷计算 18
3.3.5 轴承寿命计算 18
3.3.6 滚动轴承的预紧 19
3.3.7 滚动轴承的配合 19
3.4 伺服电机的选用 19
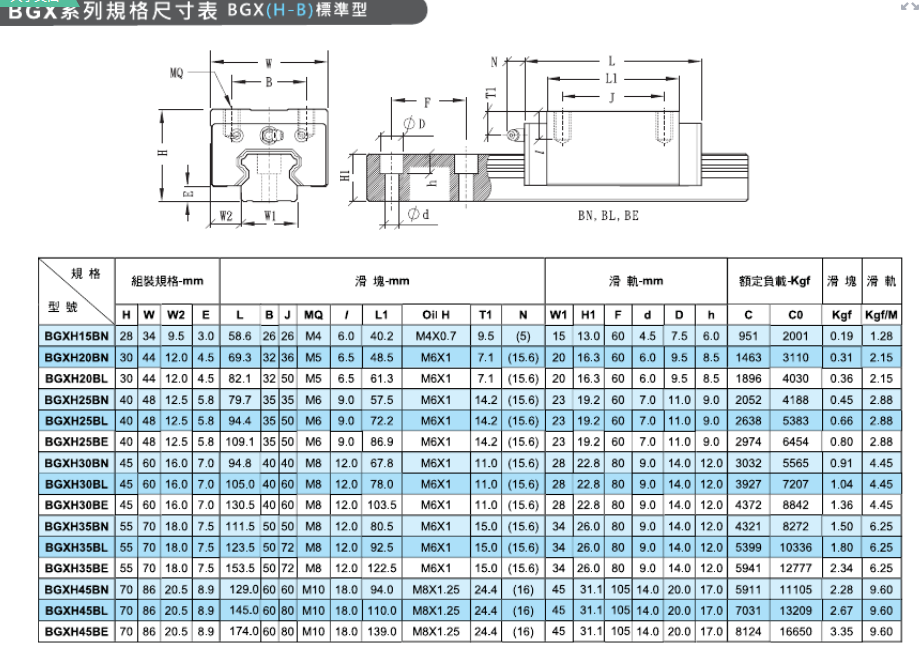
3.5 托架下直线导轨的选型 23
3.5.1导轨的选型 23
3.5.2 直线导轨的校核计算 24
3.6 齿轮传动设计计算 25
3.6.1 按轮齿弯曲疲劳强度设计 25
3.6.2 校核齿面接触疲劳强度 26
3.7 轴的设计计算 27
3.8 键的设计计算 32
3.8.1 键1 的设计计算 32
3.8.2 键2 的设计计算 32
3.8.3 键3 的设计计算 32
3.9 传动系统刚度校核 32
第4章 机械手提升机构的设计实现 34
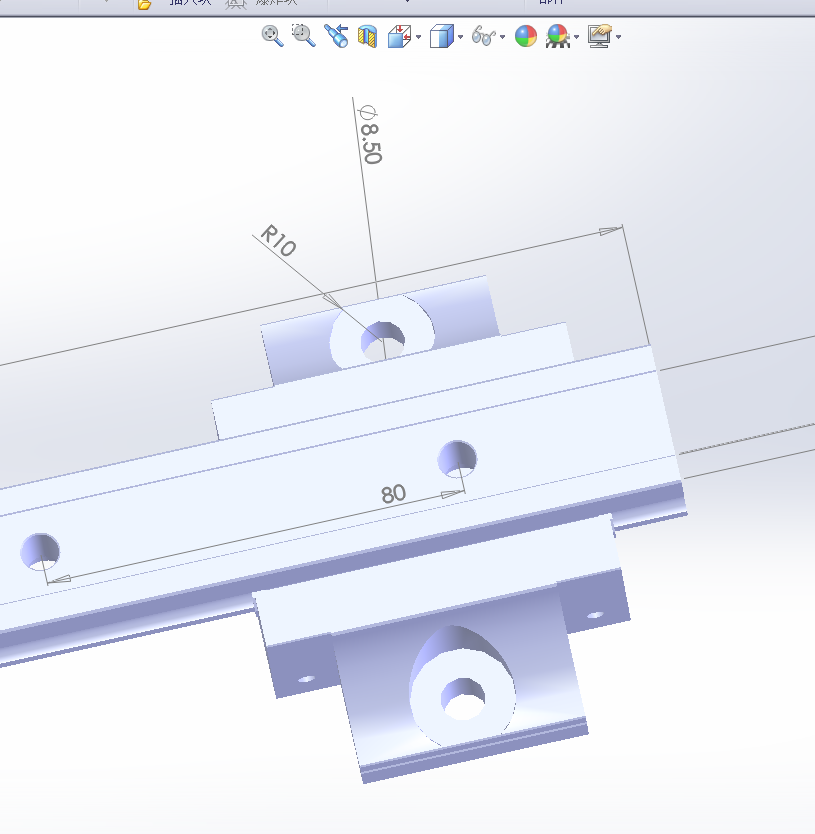
4.1 平台部分的设计实现 34
4.2 传动部件设计 37
4.3 平衡装置部件设计 39
4.4 基座设计 40
4.5 总体方案视图 42
4.6 SolidWorks相关 43
4.6.1 装配体干涉检查 43
4.6.2 装配体爆炸图 44
第5章 总结与展望 45
5.1 总结 45
5.2 展望 45
致谢 47
参考文献 48
第1章 绪论
1.1 国外研究现状
1.1.1 国外企业研究现状
目前,在世界机器人领域内有四大龙头[1],在全球范围内,机器人行业的站在第一梯队的领跑者分别是德国的库卡(KUKA)、日本的发那科(FANUC)、安川电机(Yaskawa)和瑞士的ABB。
ABB公司的的核心领域在控制系统[2],他们通过控制系统实现精准的运动控制。库卡的核心在于系统集成应用。而对于日本的这两家公司来说,发那科利用数控系统实现高精确度的控制,安川的优势在于产品稳定性很高。

图1.1 ABB公司的机器人
2017年ABB面临业务转型,转而投向汽车及电子和半导体整体行业,除此之外,还有小型机器人、小型驱动器和电机这一类产业。
就库卡公司的研究现状来说,KUKA专心研究工业机器人产品,与此同时,库卡公司逐步向3C行业应用转移,并进一步进军医疗服务领域。比如说,KUKA的 KR AGILUS sixx机器人已经研发成功,这种医疗机器人将被运用于医疗领域,它能够实现精度0.1mm的操作,可以说是一种巨大的进步了。
图1.2 KUKA的iiwa医疗机器人
发那科的SCARA sr-3ia型号等小型机器人结构小巧精致、重量轻、精度高,它的产品应用范围非常广泛,从它目前的研究情况来说,符合现在3C产品快速发展的潮流[3]。
1.1.2 国外学术领域研究现状
除了四大家族之外,国外对于机器人还有如下一些研究。麻省理工学院研究出了一种梭子鱼机器人,这种机器人是当今第一个可以完成自由游动运动的机器鱼[4]。该机器人的材料是玻璃纤维,在他身上覆盖了一层钢丝网,除此之外,它的最外部的材料是合成弹力纤维。它的后半部分的尾巴是由锥形玻璃纤维线圈制造而成的。凡此种种,才使得机器梭子鱼同时兼顾坚硬和灵活的特点。它利用伺服电机驱动,这条机器鱼的控制精度自然又是很高。
NASA的太空工程师在一次偶然机会中,从蜘蛛攀墙特技中得到启发而创造出TAIKONGZHIZHU[5]。这种机器人有一组天线来模仿昆虫的触角,在它进行位移时,它的触角可用来勘探地形[6]。这种机器人体型很小,直立高度仅18厘米。

图1.3 美国NASA研究的蜘蛛型仿生机器人
日本大阪大学和东京大学团队合作开发出了仿生半身人形机器人Alter。
图1.4 仿生半身人形机器人Alter
Alter利用气压传动原理,它的传动利用了气压传动装置。Alter只有上半身,她除了脸部和手前臂被仿生材料包裹住,身上其他组成部分都是没有仿生外皮的的机械结构。随着技术的发展,她现在借助安装的神经网络系统,表情可以发生改变。
雨燕机器人也是一种仿生机器人,它是一款能够飞行的机器人[8]。这款由荷兰Delft University of Technology的研究人员开发的名为机器雨燕的飞行机器人,是全球第一个能够轻松地、栩栩如生地模拟鸟类动作的飞行器。这款机器人通过两个翅膀和后边的机械结构的调整,可以调节飞行的方向和角度[9]。这种仿生机器人,它的翼展为50.8厘米,重量大概在80克,随身携带有低分辨率的无线摄像头。
可以说,国外对于机器人的研究已经在机器人仿生领域走得很远,很前端了。
1.2 国内研究现状
中国机器人研究就机器人研究企业来说,有五家比较厉害的。
1.2.1 机器人国内企业研究现状
其一,中国工业机器人代表企业之新松机器人。新松努力提升自身的软实力,提高自身在国际上的地位。它的双车双臂联动创新技术就已经亮相德国慕尼黑机器人及自动化博览会,其研究的双车双臂联动技术在国内研究领域已经处于领先地位。
其二,安徽芜湖埃夫特。这家公司专业制作大型物流储运设备及工业机器人研发和制造。
其三,安川首钢机器人有限公司。它所生产的工业机器人广泛应用于机械制造,科研及教学等领域。
其四,南京埃斯顿自动化。这家公司一直致力于研究高端智能机械装备的相关技术开发。
其五,东莞市拓野机器人主要研究利用六轴工业机器人加工制造,将其应用于各行业的机械自动化领域。
综上所述。中国的机器人产业研究尽管比不上国外,但在智能机器人自动化领域的研究也是不弱,但在高精度,高稳定性,高效性等特性方面仍然差的比较远。
1.2.2 机器人国内学术领域研究现状
上面是机器人国内企业研究概况,就学术研究领域而言,国内机器人研究领域,基本上不怎么研究结构,主要集中在控制系统领域,并且研究的机器人更加地贴近生活,不仅仅局限于工业机器人领域,开始向生活领域拓展[10~12]。诸如此类的导盲机器人,机器人测温系统,消防机器人,人工探路蚁的滑翔路径规划,plc控制在机器人自动生产线领域的应用,机器人减速装置疲劳测试装置,机器人控制器,仿生机器人,机器人手术系统的应用......诸如此类,不胜枚举。下面就简单介绍几个国内学术领域机器人研究的例子。
在我国珠海,珠海新概念航空航天器的李博士研究组成功地研究出了一种仿生机器人壁虎[13]。这种机器人在以后将会被广泛应用于科学实验和考察以及人员搜救上。
南航研究出了了一款仿鸟形状的“天鹰”仿生扑翼无人机。这款无人机机器人可以被应用于现代国与国之间的战斗[14]。它可以伪装成鸟类在战争领域上空监视侦察,也可以进行现实的实物攻击,它的外形会很有隐藏性。
而近年来,各大大学的航空类,飞行器类专业,研发成功了昆虫无人机、小鸟无人机等机器人。在这方面,进展都挺不错的。
南航为了设计出机器苍蝇、蜜蜂,还专门进行了仿昆虫智能材料微型无人机的设计。和普通的无人机相比,这类无人机震动频率高,并且飞行模式及其复杂,飞行更灵活。南航基于压电材料研制出了一种“振翼机”[16],但由于外部电源太大,目前只实现了振动而不能飞行。由于这类无人机发展必须依赖纳米技术,因此也被称为纳米飞行器。目前南航已经和中国材料研究所合作在研发这样一款无人机,内部结构很快就能取得突破,但电源的问题解决恐怕还尚需时日。
从最开始单纯地研究机器人,研究其结构,研究其控制,使机器人可以运动,到研究机器人的应用,开发机器人的功能作用,服务于工业,机械行业,再到现在扩展机器人的应用,并且进行优化研究,优化性能,优化算法,优化控制,优化工艺制作,并且开始研究服务于机器人本身的相关方面[17]。国内的研究现在逐渐趋于细致化,深度化,集成化。如今,仿生机器人、微型机器人热度较广。
在我国,在工业4.0时代,很多公司已经出现了以机器人大面积地取代人工劳动的情况[18]。可以说,工业机器人的引入已成为时代大势。但是,我国的机器人研究有一个问题,那就是研究主要借鉴国外的研究技术,然后进行二次开发,缺少自生产业创新,制约国内机器人产业化发展。
1.3研究的目的与意义
机器人技术中包含了许多的学科方方面面的技术和知识,并且越来越多的领域和工作都需要机器人参与。因而,机器人的研究也越来越频繁。我们如今已经能够在日常生活中见到比较多的机器人,并且随着时间流逝,随着智能技术的不断发展和成熟,随着相关工作者的坚持不懈的努力,机器人会走进家家户户啊,方便我们的生活,更好的服务人们的生活,让人们的生活更加舒适和健康。
由于产品的精细化、轻薄化等需求在日益增加,传统的人工制造已经满足不了当下的制作工艺以及生产产量,所以机器代人是制造业的未来发展趋势,不管是哪个方面,机器人的应用的普及都是大势所趋[19]。只有深入研究机械手的结构,我们才能在此基础上,在机器人领域取得更大的成就。
根据《中国制造2025》,《机器人产业发展规划(2016-2020年)》来看[20],国家也已经在大力发展机器人产业。毕竟,要想成为一个工业大国,工业硬实力绝对不能落后。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
![7P%D_)FS]C3V6%)C9YTJ6%H](http://www.biyelunwen.org/wp-content/uploads/2020/02/lw4013_2020217202412628.png)
![V)`133YRZ)13]R0($N0$WT4](http://www.biyelunwen.org/wp-content/uploads/2020/02/lw4013_20202172024187.png)
![8JIKX2_`1_NH]0[6LZ[23}S](http://www.biyelunwen.org/wp-content/uploads/2020/02/lw4013_2020217202418132.png)