机械手齿轮差速手腕传动机构设计毕业论文
2020-02-17 20:25:03
摘 要
工业机器人在当今的工业生产中正逐渐代替传统机械和人力,成为制造业发展的关键。中国是最大的发展中国家,中国的工业发展迅速,因此,中国对于工业机器人的需求也是逐年上升。我国作为工业机器人发展较晚的国家之一,对工业机器人机械手的研发和制造能力相较落后,因此,进行软硬件相关的研究就更加显得迫在眉睫,本文主要进行了工业机器人机械手齿轮差速手腕传动机构设计,并进了相关的结构分析与力学分析以及运动仿真,所得结果对于机械手手腕传动机构的设计研究具有重要的指导意义。
本文主要设计内容如下:
- 研究了工业机器人的发展和国内外现状。对比了两种初步设计方案。
- 本结构利用两个差速器结构,将两个输入轴的转速差值输出到输出轴,达到平稳运行和摆转切换的功能。
- 本文中主要设计了相互啮合的直齿圆柱齿轮、直齿锥齿轮等齿轮,并校核了其强度。
- 选定了一根轴体进行了计算强度校核,对其他的一些轴选用了仿真得形式进行校核,运用的是Simulation静力学仿真校核。
- 设计了箱体并选取了相关附件;选取了轴承螺丝等标准件。
- 进行了三维建模和工程图的绘制。
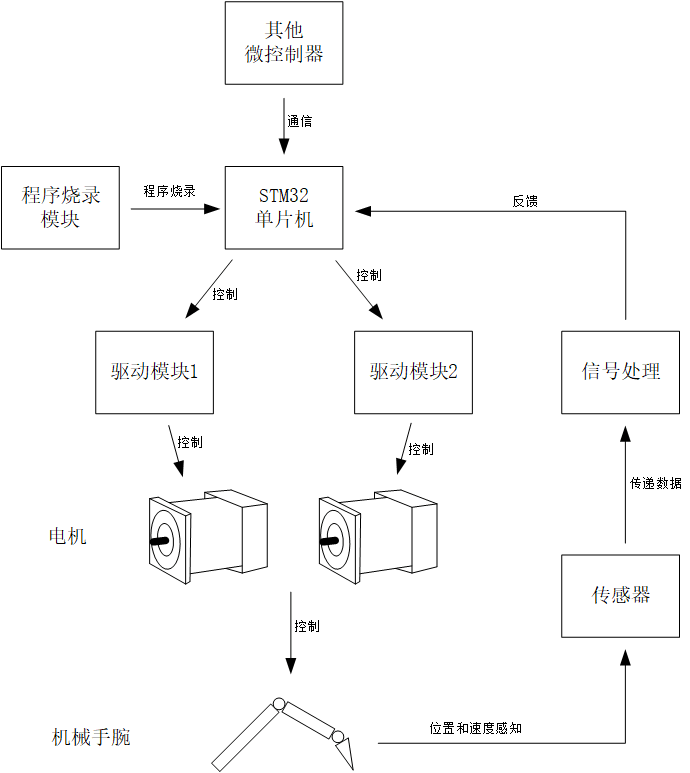
- 最后进行了控制系统的总体方案设计。
关键词:工业机器人;机械手;差速器;传动手腕;计算机辅助设计(CAD)
Abstract
Industrial robots are gradually replacing traditional machinery and manpower in today's industrial production, and become the key to the development of the manufacturing industry. China is the largest developing country, and China's industry is developing rapidly. Therefore, China's demand for industrial robots is also increasing year by year. As one of the countries with late development of industrial robots, China is lagging behind the Ramp;D and manufacturing capabilities of industrial robot manipulators. Therefore, research on hardware and software is even more urgent. In this paper, the design of industrial robot manipulator gear differential wrist transmission mechanism is carried out, and related structural analysis and mechanical analysis and motion simulation are carried out. The results obtained have important guiding significance for the design and research of the wrist mechanism of the robot.
The main design contents of this paper are as follows:
(1) the development and current situation of industrial robots at home and abroad are studied. Two preliminary designs are compared.
(2) this structure USES two differential structures to output the rotational speed difference between the two input shafts to the output shaft, so as to achieve the function of smooth operation and swing switch.
(3) in this paper, the main design of the meshing spur gear, spur bevel gear gear and other gear, and check its strength.
(4) one shaft was selected for calculation strength verification, and some other shafts were selected in the form of Simulation, and Simulation was used to verify them.
(5) the box is designed and relevant accessories are selected; Selected bearing screws and other standard parts.
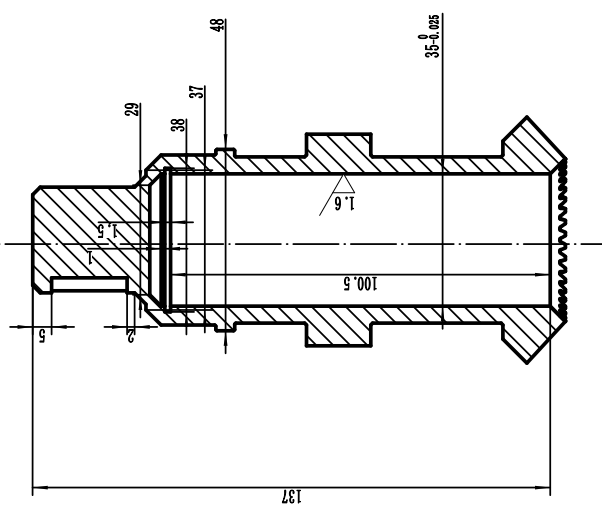
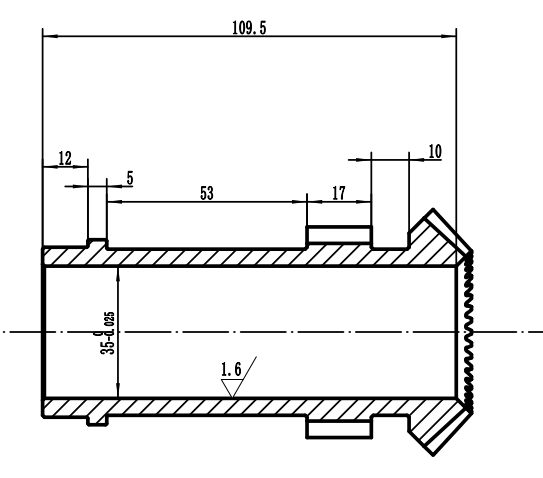
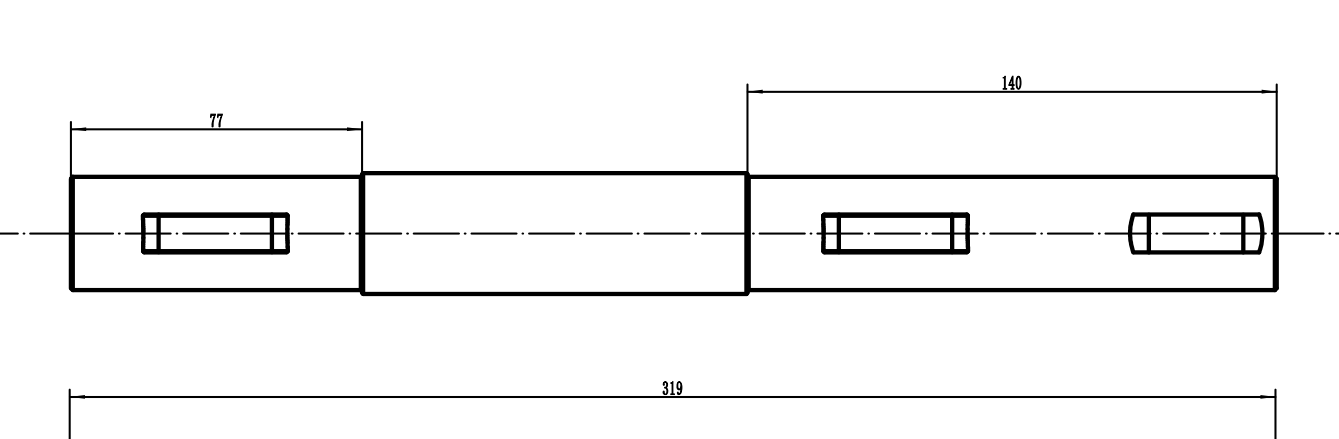
(6) 3d modeling and engineering drawing are carried out.
(7) finally, the overall design of the control system is carried out.
Key Words:Industrial robot;Manipulator;Differential;Drive wrist;Computer Aided Design(CAD)
目录
第1章 绪论 4
1.1 设计背景目的及意义 4
1.2 国内外现状分析 4
1.3 设计内容及目标 5
第2章 总体方案设计 6
2.1 方案分析 6
2.2 动力选取 7
2.3 传动装置运动和动力参数计算 8
2.4 控制方案设计 8
第3章 齿轮的设计及校核 10
3.1 直齿圆柱齿轮 10
3.2 锥齿轮 13
3.3 换向齿轮 16
第4章 轴的设计及校核 18
4.1轴的初步设计 18
4.2 轴的几何尺寸及轴承选取 20
4.3 强度校核 26
第5章 键与联轴器 41
5.1 键的选择与校核 41
5.2 联轴器的选择 41
第6章 箱体的设计 43
6.1 箱体计算及设计 43
6.2 润滑与密封 43
第7章 设计总结 44
参考文献 45
致 谢 46
第1章 绪论
工业机器人的定义,是多关节机械手亦或者是多自由度的机械装置,它面向工业生产,能够靠自身动力和控制能力来自动执行工作,实现各种功能。从卓别林的《摩登时代》中人们的幻想,到如今司空见惯的各种生产流水线,工业机器人从设想开始到如今已经走过了将近一个世纪的路程。现如今,工业机器人正在各行各业的各个流水线上不分昼夜的高效运转,推动着世界制造业的蓬勃发展。
- 设计背景目的及意义
工业机器人领域是世界上最引人瞩目的高新技术,它在提高生产效率、稳定产品质量、提升生产竞争力方面,有着无可替代的作用。很多国家都己经将工业机器人技术的发展制造列入本国的发展计划,例如德国提出的工业4.0,中国提出的《中国制造2025规划纲要》,在这其中也,我国也明确提出了要加快工业机器人等智能制造装备的发展。
简言之,在当今这个工业生产讲求自动化和高效率的时代,一个国家的工业发展,完全离不开工业机器人。工业机器人的技术越先进,就能完成越高效且高精尖的生产制造,这对于综合国力的提升和巩固都是有举足轻重的作用的。
- 国内外现状分析
当今国际市场上主流的十大品牌,也是行业的顶尖品牌,主要有:FANUC(发那科)、那智不二越、川崎、KUKA、ABB、史陶比尔、柯马、EPSON(爱普生)、Yaskawa(安川)、新松等。这些品牌无一例外,都是国外的品牌。
作为工业机器人的发源地,美国创造并发掘了工业机器人的价值,并且一直不断的进行研究,所以在工业机器人领域,美国的基础雄厚技术先进,是世界上的机器人强国之一;日本在战后的迅速发展中,紧跟美国的步伐,也迅速发展了起来,并一跃成为“工业机器人王国”,以FANUC等牵头的日本工业机器人企业,凭借高技术低价格的优势,占据着当今世界工业机器人市场的很多份额,并且,日本本国的工业机器人保有量远超世界上的其他国家;除了美日以外,德国和瑞士等欧洲国家,在工业机器人领域也处于领先地位,作为一个传统的工业国家,德国有着“自古以来”工业优势,并且在近几年提出了工业4.0的概念,试图引领新的工业时代。
中国的工业机器人企业虽然相对年轻,但也通过不断地努力追赶,慢慢的在国际上占据着更多的市场,在技术上引领发展。一批国内的工业机器人企业,如沈阳的新松,南京的埃斯顿,广州的广州数控,武汉的华中数控,上海的图灵等,如雨后春笋,努力追赶超越世界先进水平。
中国的工业机器人的研发和制造水平相对于国外来说较为落后,这是因为工业机器人本身就起源于西方国家,他们有着先发优势。但优势也不可能是永久的,中国也有自己的后发优势,我国的一些年轻企业,如沈阳的新松,南京的埃斯顿,广州的广州数控,武汉的华中数控,上海的图灵,这些企业正在通过自身的不断学习和努力,逐步追赶国际最先进的水平。中国改革开放后这些年的发展大家是有目共睹的,虽然我国的工业机器人真正的大批量进入商用和工厂也仅仅是近几年的事,但是经过迅速的发展,我国的产品已经开始服务与国内的企业上产线上面,技术也得到了充分的发展,甚至在一些领域上已经达到了国际一流的行列。
当今的全球各大企业,都在朝着自动化柔性化的方向大步前进,而工业机器人正是自动化柔性化生产的重要生产设备之一。现阶段工业机器人,主要朝着智能化,模块化,柔性化,高精化方向发展,所以,具有这些优秀性能的工业机器人,必然可以给企业在未来的竞争中带来持续强劲的竞争力。
- 设计内容及目标
本次的设计题目,是工业机器人机械手齿轮差速手腕传动机构设计。通过对现有资料上的相关设计结构进行广泛的研究,设计出一种齿轮差速手腕传动设计方案,该手腕要求额定的负载20kg,可转动范围为180°。计算参数并设计结构,其中主要有齿轮,轴,箱体的设计。用Solidworks建模,并进行力学仿真,根据结果改进,设计控制系统的总体方案,并撰写设计说明书。
第2章 总体方案设计
2.1 方案分析
传动方案的选取,要考虑到工作可靠、结构简单、成本低廉、尺寸紧凑、效率高及维护方便。在方案选取中要充分考虑这些因素,拟定多种方案并进行比较,根据具体的情况选取合理的方案。
本设计有2个输入轴,2个输出轴,根据要求拟定以下两种方案:
方案一是采用两根实心换向轴传动,2输入轴、8空心轴、9空心轴、14轴、3输入、10空心轴、11空心轴、15轴、19双联装齿轮轴在一个平面内,17-18双联装齿轮轴在这个平面上方的第二个平面,17齿轮经第三个平面的换向齿轮与15齿轮啮合。一共有5根实心轴,4根空心轴,6种齿轮,箱体4轴孔三个安装平面
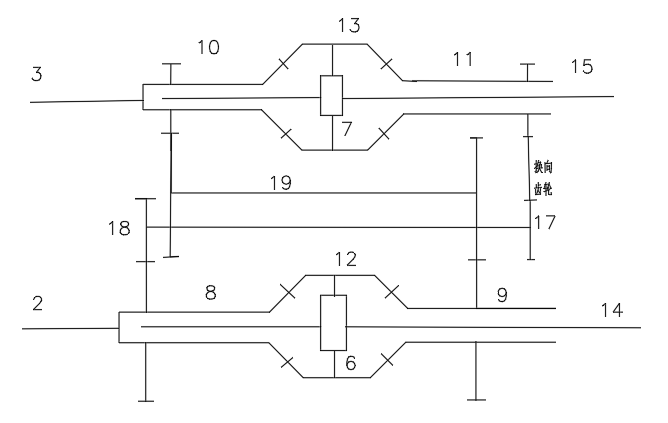
图2.1 方案一简图
方案二是采用空心换向轴传动,2输入轴、8空心轴、9空心轴、14轴、3输入、10空心轴、11空心轴、15轴、19双联装齿轮轴、17-18双联装齿轮轴全部在一个平面内。17和15齿轮依靠上方平面一个换向轴连接。一共有4根实心轴,5根空心轴,4种齿轮,箱体4轴孔两个安装平面。
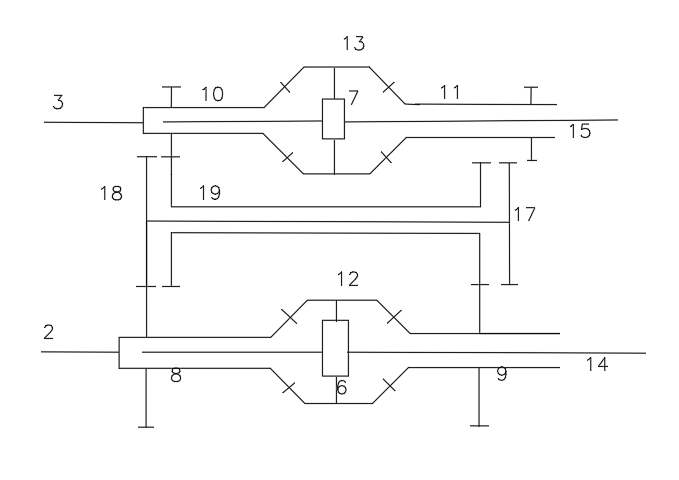
图2.2 方案二简图
比较以上两种方案:方案一轴数多,结构复杂,齿轮类型多,且箱体多孔结构复杂制造成本高,难以保证装配精度和使用寿命,且不方便维护,;方案二工作可靠,轴数少,齿轮类型少,且箱体孔少结构较为简单,更易于保证装配精度,方便维护,环境适应性好,制造成本低。
在进行了对比后,我们选取第二种方案进行设计。
手腕转动链:2-8-12-6-14、2-8-18-17-换向齿轮-11-13-7-15
手腕摆动链:3-10-13-7-15、3-10-19-9-12-6-14
2.2 动力选取
要选择电机,首先要进行输出功率计算的计算,然后根据传动的损耗,求得输入端的功率的等参数。该设计采用双输入双输出,结构对称,所以计算一对输入输出即可。
拟定输出转速为n=40r/min,负载g=20Kg,前端力臂长L=0.8m
 (2.1)
(2.1)
由公式(2.1)得出单边输出扭矩T=160N*m
 (2.2)
(2.2)
由公式(2.2)得计算得输出功率P=670w
由《机械设计手册》查得各传动效率系数如下:拟采用7级精度齿轮传动,圆柱直齿轮传动效率η=0.98;锥齿轮传动效率η=0.97;拟采用滚针与滚珠轴承,可得滚珠轴承传动效率η=0.99;滚针轴承传动效率η=0.98;联轴器传动效率η=0.99
计算最长传动链可得最小传动效率η≈0.85
 (2.3)
(2.3)
由公式(2.3)计算可得输入功率P≈788w
电机额定功率应等于或略大于计算出的输入功率,由于该装置转速较低,拟选用YDS系列低速电机,型号及参数如下表。
表 2.1 电机型号
型号 | 额定功率(w) | 转速(r/min) | 电动机质量(Kg) |
YDS100 | 800w | 40r/min | 30kg |
2.3 传动装置运动和动力参数计算
由于整体结构的对称性,所以在参数计算中只计算一部分。该设计中直齿轮不参与减速,拟定传动比分配如下表。
表 2.2 传动比
齿轮副 | 8-18 | 17-11 | 11-19 | 19-9 | 行星齿 |
齿比 | 1:2 | 2:1 | 1:2 | 2:1 | 1:1 |
运动和动力参数计算:

 (2.4)
(2.4)
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: