一种变刚度软体机械手的设计毕业论文
2020-02-17 20:50:01
摘 要
本文是在现有的软体机械手的研究基础上,采用气动驱动方式,将颗粒阻塞效应用于机械手中,设计了一种可变刚度软体机械手;通过实验验证了颗粒阻塞效应的实际效果,估算了机械手阻塞后的整体刚度。
本文的主要工作包括:
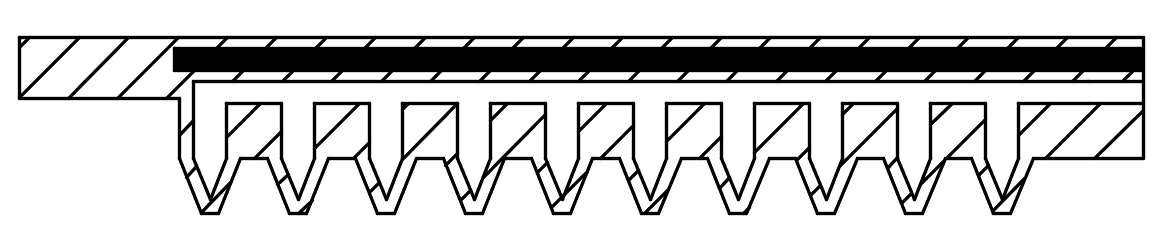
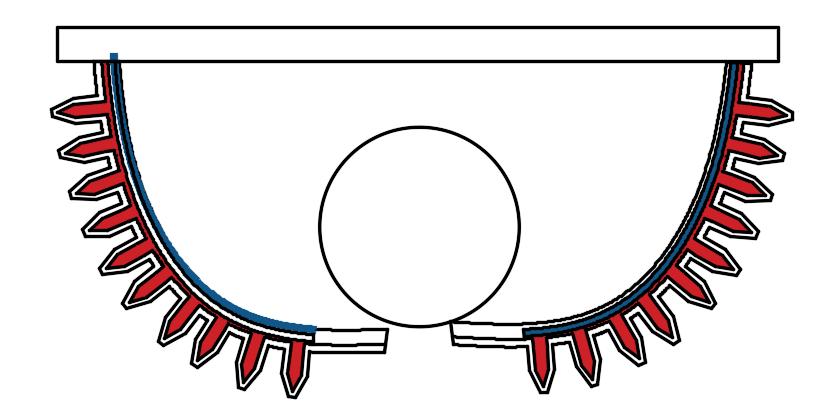
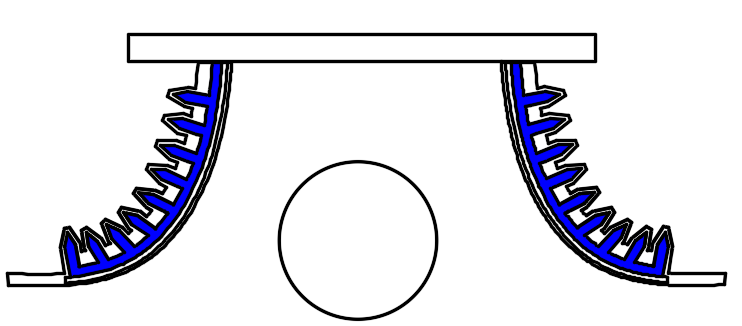
1)气动手指的结构设计和制作:利用材料和结构的各向异性设计了软体手指,通过颗粒阻塞效应设计了变刚度层,并设计了浇铸成型的加工工艺。通过组合这两种部件,设计了本文中气动软体机械手;
2)搭建了气路系统:为了进一步驱动软体机械手,本文设计了配套的气路系统,分别控制软体爬行机器人的弯曲层与变刚度层的内部气压,完成软体机械手的抓取动作
3)基于有限元仿真系统地探究了软体手指的结构参数对其驱动特性的影响:借助有限元仿真软件选取弯曲层材料、空腔数量以及空腔间壁厚三个参数探究了其对软体手指弯曲特性的影响规律,通过综合调控这些结构参数可使软体机械手具备更好的特性,这对后续的研究工作有很好的指导意义。
4)阻塞效应的实验验证:搭建验证阻塞效应的试验台,得到不同压力,不同负载下变刚度层的侧向位移,并将变刚度层看作悬臂梁模型,根据实验数据估算变刚度层的刚度(弹性模量),最终估算软体手指的弹性模量。
关键词:软体机械手;颗粒阻塞效应;变刚度;有限元仿真
Abstract
Based on the research of the existing soft manipulator, this paper combines the pneumatic driving method and granular jamming to design a variable stiffness soft gripper. Meanwhile, the test bench is established to verify granular jamming effect, and the overall stiffness is estimated according to the experimental data. The main work of this paper includes the following things.
1) The structural and fabrication design of pneumatic finger: The paper uses the anisotropy of material and special structures to design the soft gripper fingers, then designs the casting molding processing technology. Also,the variable stiffness layer is designed by granular jamming effects. By combining these two components, the pneumatic soft gripper is designed.
2) Construction of multi-gas system: In order to drive the soft gripper, this paper designs a multi-pneumatic system to control the internal pressure of the bending layer and the variable stiffness layer of the soft gripper, thus driving the grasping action of the soft gripper.
3) Based on the finite element simulation system, the influence of the structural parameters of the soft finger on its bending characteristics is explored: The finite element simulation software is used to explore the influence of the bending layer material, the number of cavities and the wall thickness between the cavities on the bending characteristics of the soft finger. Better characteristics of soft grippers can be achieved by comprehensively regulating these structural parameters, which has a good guiding significance for the subsequent research work.
4) Experimental verification of granular jamming: The paper sets up a test bench to verify the granular jamming effect, and obtains lateral displacement of the variable stiffness layer under different pressures and loads. Considering the variable stiffness layer as a cantilever beam model, the paper estimates the stiffness (Elastic Modulus) of variable stiffness layer according to experimental data, thus estimating the overall elastic modulus of soft grippers
Key Words:soft gripper; granular jamming; variable stiffness; finite element simulation
目 录
第1章 绪论 1
1.1课题的研究背景和意义 1
1.2 软体机械手国内外研究现状 2
1.2.1线缆驱动软体机械手 2
1.2.2气动软体机械手 3
1.2.3 SMA驱动软体机械手 4
1.2.4 EAP驱动软体机械手 5
1.2.5 其他智能材料驱动软体机械手 6
1.2.6 国内软体机械手研究现状 7
1.3 本文的主要研究内容 8
第2章 软体机械手结构设计 9
2.1总体方案的设计 9
2.1.1软体机械手的设计指标 9
2.1.2 软体机械手结构设计与抓取机理 9
2.2弯曲模块的设计与制作 10
2.2.1弯曲模块的弯曲驱动器原理 10
2.2.2 弯曲模块的材料选择 11
2.2.3 弯曲模块结构的设计 12
2.2.4 弯曲模块的制作工艺 12
2.3变刚度模块设计与制作 14
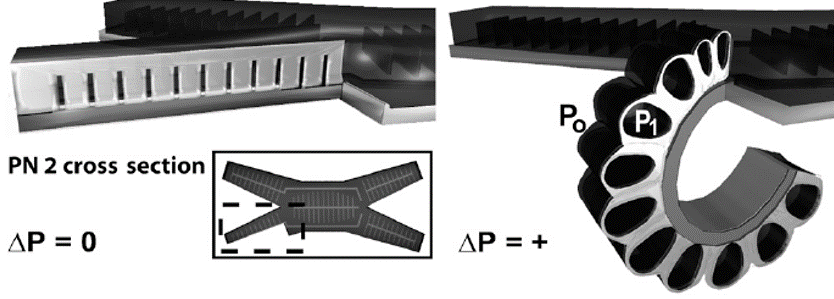
2.3.1颗粒阻塞的机理 14
2.3.2阻塞效应影响因素 15
2.3.1变刚度层的制作工艺 15
第3章 气路平台的设计及时序控制 16
3.1气路平台硬件的选择 16
3.2 气路平台控制原理 17
第4章 结构参数对机械手弯曲特性影响的有限元分析 18
4.1软体手指有限元建模 18
4.1.1超弹体材料的材料模型 18
4.1.2软体弯曲驱动器的力学分析 19
4.1.3有限元模型的建立 20
4.2各参数对软体弯曲驱动器弯曲特性的影响 22
4.2.1弯曲层材料对弯曲特性的影响探究 23
4.2.2空腔数量对弯曲特性的影响探究 24
4.2.3空腔间壁厚对弯曲特性的影响探究 25
4.3 仿真结论 26
第5章 变刚度层阻塞效应的实验验证与分析 28
5.1阻塞效应实验验证 28
5.2变刚度层的刚度计算 29
第6章 总结与展望 33
参考文献 35
致 谢 37
第1章 绪论
软体机器人是一种新型的机器人,不同于刚性机器人,软体机器人具有高度的灵活性以及对环境的适应能力,在医疗、工业、军事、探测等领域具有广阔的应用前景,而软体机械手作为软体机器人重要的分支,逐渐成为领域内的研究热点。
1.1课题的研究背景和意义
传统机器人在经过半个多世纪的发展后,逐渐出现瓶颈,在面对环境复杂,对象未知的问题时,传统机器人的适应性往往难以满足要求。而自然,一直而言都是工程师灵感的来源。漫长的进化过程使地球上的生物各自具有了适应环境的特色结构,其中,几种软体生物的结构逐渐吸引了机器人领域研究人员的关注。学者解剖了章鱼触手与象鼻,提出了“肌肉型静水骨骼”的结构,其可通过压力变化改变内部形状[1]。基于这种仿生原理,研究人员设计出一系列新型机器人,后面这些机器人被统称为软体机器人。
软体机器人启发于自然界中的软体生物原型,大多采用可以产生大变形的弹性材料,具有无限多个自由度,模仿软体动物的运动,能够实现弯曲、伸缩、蠕动、扭转、爬行和游动等运动形式。[2] 软体机器人的柔性是其高度的适应性与人机协同安全性的基础,使其可以更好的适应环境,服务于人。
机械手作为机器人与目标实物相互作用的执行部件,对提高机器人的工作性能具有十分重要的意义。传统的机械手结构简单,运动单一,自由度少,抓取稳定性与适应性差,很大程度上制约了机器人性能的进一步提升[3]。因此,研究人员将目光放到了软体机械手上。这些机械手多为仿人形机械手,灵活性强,适应性高,在特定场合下具有传统机械手不具备的巨大优势。
本文以此为背景,设计一种变刚度软体机械手,在传统气动机械手的背景下,引入“变刚度”的概念,解决传统气动机械手抓取过程中存在的柔性过大而刚度不足的问题,能在不破坏被抓取目标物体的前提下稳定地抓取,因此适用于对于安全性和柔性要求较高的场合,例如军事,医疗以及海洋科考中对于生物样本的抓取等。
1.2 软体机械手国内外研究现状
软体机械收起步较晚,但发展迅速。国内外关于此方面的研究多从材料,驱动,控制,传感以及应用五方面展开。本文从驱动方式出发,介绍国外软体机械手研究现状。
1.2.1线缆驱动软体机械手
线缆作为一种组件,径向具有很高的拉伸强度而其他方向却十分柔软且弯曲,因此其可以穿过复杂的路径并很好的贴合在软体结构中,通过改变线缆的长度可以使软体结构发生形变[4]。图1-1是一种由线缆驱动的软体机器人 [5],它是一种三指机械手,每根手指有三段指节,每个连接处有一个自由度。装置采用线缆驱动,线缆缠绕在底部的电机上,分别穿过三段指节。电机转动,线缆长度发生变化,带动机械手完成开合,图1-2是它实际的抓取表现。



图1- 1 线驱动软体机械手结构

图1- 2 线驱动软体机械手实际抓取表现
1.2.2气动软体机械手
气动因其介质重量轻、来源广、无污染等优点被广泛应用于软体机器人。从供气方式看,可分为气泵供气,气缸供气与化学反应供气;气压性质看,其可分为正压驱动与负压驱动;从结构看,分为纤维约束与气动网络两种不同的气动结构。
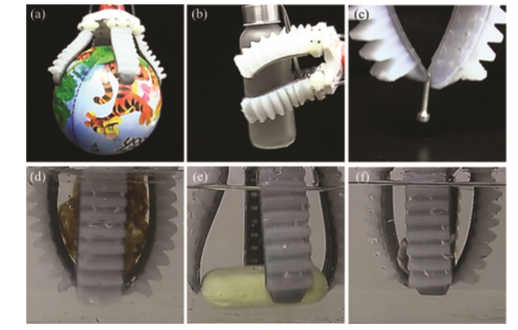
McKibben气动肌肉是一种典型的纤维约束结构。气动网络结构如图1-3-a所示,上层采用杨氏模量较小的超弹体材料,同时其空腔结构,在有高压气体进入的时候使其膨胀,下层采用延展性相对较差的软材料,限制下层的延展。上下的不对称变形导致了整体结构的弯曲变形,即通过改变空腔气室的压力即可实现弯曲动作[6]。图1-3-b是利用启动气动网络制成的软体机械手, 每个手指有三组腔道,可向任意方向弯曲,并且对不同的物体有着很高的适应性[7]。图1-3-c是一种水下作业的软体机械手,其仍然利用气动网络工作,但驱动流体由气体变为液体,由图可以看出,这种抓手可以在6秒内完成对金鱼的抓取[8]。图1-3-d对利用热可逆橡胶代替传统的硅橡胶作为柔性材料,实现了软体机械手的自愈功能[9]。图1-3-e是利用启动网络制成的仿人型机械手,可以复现人手的动作,同时完成抓取纸杯等日常用品的功能[10]。





(a) 气动网络结构
(b)气动网络机械手
(c)水下作业气动软体机械手
(d)自愈合气动软体机械手.
(e)仿生软体机械手
图1- 3 气动软体机械手
1.2.3 SMA驱动软体机械手
形状记忆合金,又被称作SMA,是一种智能材料,在加热时自恢复,将SMA 嵌入到机器人本体中可以驱动机器人在某个方向的运动。图1-4-a[10]利用双向记忆合金设计了一种四指机器人,在50℃的情况下完成了对一枚硬币的抓取。图1-4-b用3D打印的技术制造了一种微型抓手,它的长度只有几毫米,可以完成微小物体(螺钉)的抓取[11]。而图1-4-c将SMA与软性材料硅橡胶结合起来,将记忆合金内嵌入软体结构中,由记忆合金完成驱动,而外层的软性材料保证抓取的安全性[12]。



(c)复合材料SMA软体机械手
(b)3D打印SMA驱动软体机械手
(a)双向记忆合金软体机械手
图1- 4 SMA驱动软体机械手
1.2.4 EAP驱动软体机械手
从20世纪90年代逐渐发展起来的电活性聚合物(EAP)在外加电场的作用下会发生相应的形变。研究人员利用这种性质设计出了不同种类的软体驱动器。EAP分为电子型与离子型,其中电子型EAP被称为DE,具有更高的柔性,抗疲劳性以及能量转换率,研究人员将其嵌入机器人本体中,在外加电场的作用下控制其发生形变,完成相应的动作。图1-5-a是一种DE驱动的三角抓手,在外加电场的作用下,该结构能够完成一些轻质物体的抓取[13]。图1-5-b是一种不同类型的抓手,与图1-5-a不同,这个例子中,DE材料作为装置的驱动器,而复合材料作为抓手的框架,这种抓手可以抓取极易变形的物体,如图中抓取的蛋黄[14]。
除电子型电活性聚合物外,离子交换聚合金属材料(IPMC)也是驱动软体机器人的常用材料。当对IPMC厚度方向施加电压时,IPMC会产生较大的变形,向阳极弯曲(直接现象);相反,当IPMC受到弯曲变形时,IPMC也会在厚度方向产生电压(反现象)。IPMC的刚度在0.6-21GPa之间,随复合材料中金属比例的变化而变化。该材料可以在1-5V的低压下发生较大的形变,因此被用来驱动软体机器人。图1-5-c是IPMC材料制成的四指毫米级微型机械手[15]。



(a)DE驱动软体机械手
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: