垂直爬行机器人结构设计与分析毕业论文
2020-02-17 20:50:17
摘 要
随着科技的进步,机器人在取代人类工作方面起到了很大的作用,本文设计了一款垂直爬行机器人,主要功能是用于攀爬一些圆柱形杆类物体如电线杆、广告牌杆、避雷针、椰树等较为笔直的树干等等,可以代替人工对一些高空杆件进行维护清洗,或者如采摘椰子、砍伐树木等工作,用以减少危险的发生和提高效率。本文主要以机械结构设计为主,以机械爪为功能部件设计了一种四爪垂直爬行机器人,其特点是模仿动物爬树的运动方式,以机械爪的协同运动实现功能,优点为越障能力强,适用面广等等,再通过驱动模块和控制模块的设计分析,最后进行ADAMS运动仿真,对机器人做了基础性的研究。
关键词:垂直爬行;爬杆机器人;结构设计;ADAMS仿真
Abstract
With the advancement of technology, robots have played an important role in replacing human work. This paper has designed a vertical crawling robot whose main function is to climb some cylindrical rod objects such as utility poles, billboards, lightning rods and some other straight trunks like coconut trees. This robot can replace the manual maintenance of some high-altitude bars, or work such as picking coconuts and cutting trees to reduce the occurrence of danger and improve efficiency. This paper mainly designs mechanical structure design, and designs a four-claw vertical crawling robot with mechanical claws as its functional components. It is characterized by imitating the movement mode of animal climbing trees, and realizes the function by the coordinated movement of mechanical claws. It is good at climbing over obstacles and suitable for a wide range of applications, etc. We have basic research on this robot through the design and analysis of the drive module and control module, and the final ADAMS motion simulation.
Key Words: Vertical crawl; Pole climbing robot; Structural design; ADAMS simulation
目 录
第1章 绪论 1
1.1 研究背景及意义 1
1.1.1 机器人研究背景 1
1.1.2 目的及意义 2
1.2 国内外研究现状分析 2
1.2.1 机器人定义及发展 2
1.2.2 垂直爬行机器人研究现状 2
第2章 结构方案设计 5
2.1 垂直爬行仿生类研究 5
2.1.1 固定及移动结构 5
2.1.2 仿生运动分析 5
2.2 机械结构设计 7
2.2.1 机械臂(爪)结构分析 7
2.2.2 机械结构方案比较 8
第3章 驱动与控制模块设计 11
3.1 驱动功能模块设计分析 11
3.1.1 机器人参数设定 11
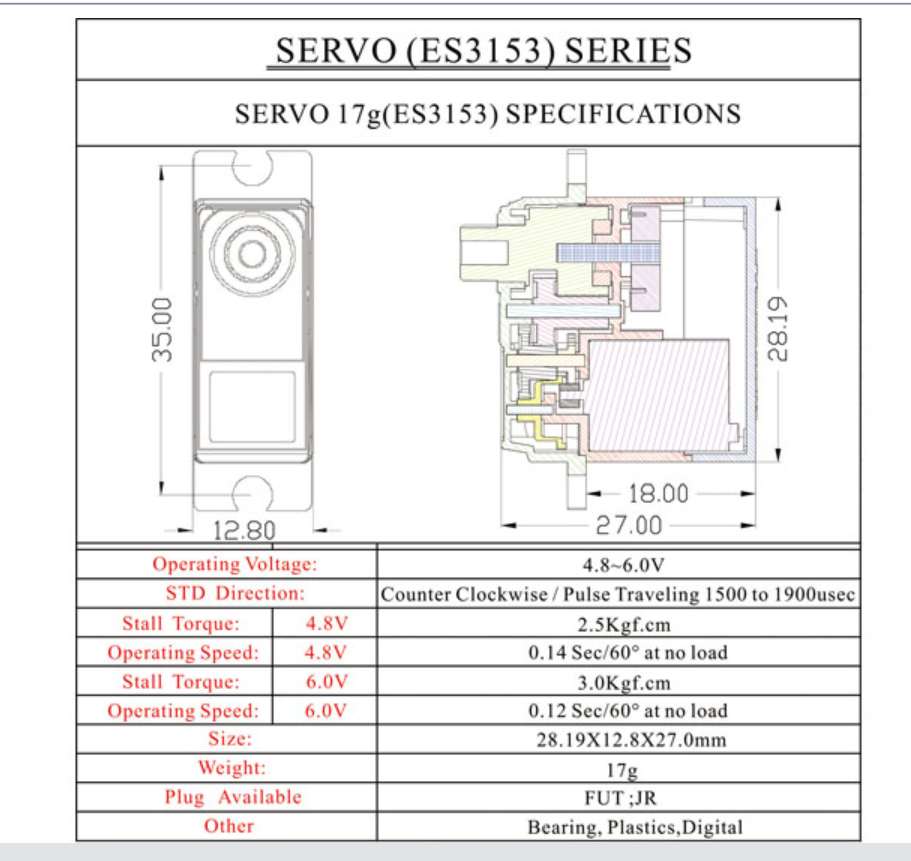
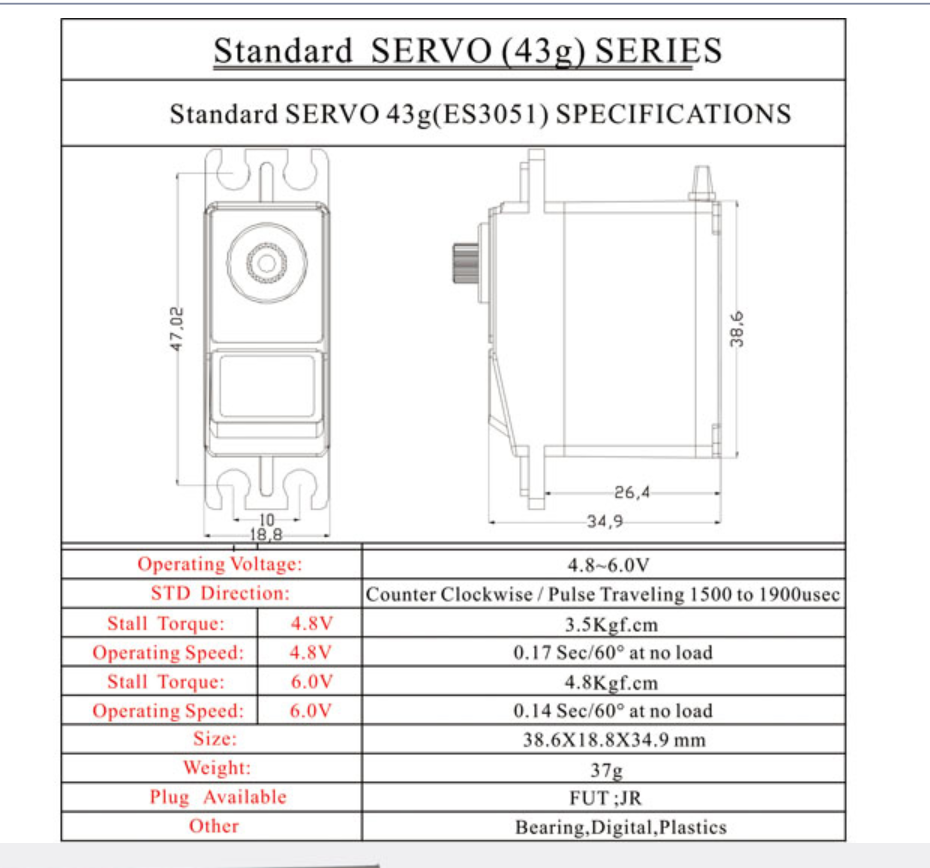
3.1.2 电机选型 12
3.2 控制功能模块设计分析 14
第4章 运动仿真分析 18
4.1 仿真软件简介 18
4.2 仿真建立过程 18
4.3 仿真结果 21
第5章 结论 23
5.1 总结 23
5.2 机器人展望 23
参考文献 25
第1章 绪论
1.1 研究背景及意义
1.1.1 机器人研究背景
当代社会,经济的发展的同时也伴随社会在不断地进步,国内外城市化的进程也在与时扩大。因此,在如今的社会中,城市的交通、市政、市容等方面也有了很大的进步。为满足这些方面的发展需要,电线杆、路灯杆、广告牌立柱等柱状类设备或者建筑装置,也纷纷出现在街道、公园或者广场上。此类电线杆、路灯杆以及其他柱状类装置,往往高达五到十米,有些广告牌立柱甚至高达上百米。这些设备在安装完成之后,往往也会伴随一些维护方面的问题:随着使用时间的增长,这些杆的表面会残留许多污垢,从而影响了杆本身的美观性;杆上的壁面以及连接处,也可能由于雨水或者其他物质而造成腐蚀,安全隐患的问题无法避免。这些维护方面的问题,为无论如何都无法避免的问题,会造成人力、物力上的大量消耗。
当前,对于杆类设备现有的清洁维护主要方式为升降车清洗与高压水枪清洗。主要流程为针对每根杆子,升降车停放至指定位置并且将车体稳定下来,之后控制升降台上升到指定的高度后,由清洁人员手持工具进行清理,这其中就存在一个问题,整个工作流程缺乏效率,并且在出现一些特殊地形的情况时,升降车难以进入,此时更无法采用升降车清洁的方式了。因此,这种清洁方式有其相对较大的局限性。而对于高压水枪清理方式而言,成本与耗能会成为一个极大地问题,并且在实际使用的过程中,会发现高压水枪对于杆的低端位置(离地一至两米)的清理效果较好,当高度上升以后,清洁效果会因为距离以及其他因素而大幅下降[1]。
在发电厂,变电站等处,为防止设备因雷电产生破坏,会在附近设立避雷针,此类避雷针的高度通常在四十到五十米,当避雷针这种杆件安装后,必然会带来因腐蚀而产生的清理维护问题,但由于身处野外,地形相较于城区更加复杂,此时升降车的停放更是一大问题,导致使用升降车的维护方式十分不现实,当然对于避雷针的高度,高压水枪就更不现实,这使得维护成为一大难题。
在我国海南以及世界上其他热带地区,椰子种植多年来都是相当繁荣的。当然,此时椰子的采摘也出现了类似于清理维护电线杆、路灯杆的问题。通常椰子树的高速在十到十五米,树干笔直,椰子果实在树的上端,采摘具有相当的难度。目前海南采摘的方式为:1、人上树摘,这是海南人摘椰子的主要方法,但主要问题是危险。2、拿铁钩绑在长竹杆上钩,这主要是对较矮的椰子树且功效较低,劳动强度大。3、训练猴子上树摘椰子,但收效差成本过高。以上的采摘方式都比较低效,需要一个高效的采摘方式或者人工辅助装备。
1.1.2 目的及意义
从以上的各种情况来看,当前人们对于杆状物体的高空作业还是以人工作业为主,且均有效率低、风险高的问题。因此针对这些问题,急需设计一款垂直爬行机器人,旨在对高空杆件作业时,能够在相关场合代替人工以提高效率,降低危险和成本,甚至可以解决人类无法解决的问题,具有很大的研究意义。
1.2 国内外研究现状分析
1.2.1 机器人定义及发展
机器人在联合国标准化组织中所采用的定义来源于位于美国的机器人协会,其具体来说为:“一种可编程和多功能的操作机;或是为了执行不同的任务而具有可用电脑改变和可编程动作的专门系统[2]。”机器人从严格意义上来说是作为一种机器装置而存在的,从字面意义上来看,最直观的表现是机器人的功能之一就是可以代替人类来进行一些人类的工作,从而完成相关任务,其特点是可以自动执行工作。机器人的工作方式主要有人类实时指挥操作的作业、根据预先设定好的特定程序自动执行的作业以及以人工智能技术为基础的具有一定类人型逻辑思维判断能力的相关作业。从1959年世界上第一款工业机器人问世到如今,机器人已经走过了有60年的发展历程并且取得了飞跃式的进步,其作为机构学、计算机科学、机械学、信息学等多学科综合的高科技产物、在当代的众多领域如工业、农业、医学及军事等日益凸显其不可忽视的作用。
1.2.2 垂直爬行机器人研究现状
垂直爬行机器人(爬杆机器人)作为机器人的一种,顾名思义此类机器人所需实现的首要功能要能够在某些物体表面上自由上下爬行。并且对于本次设计所研究的爬杆机器人而言,不同于地面机器人,其需要通过依附于圆柱形杆件表面以形成摩擦力来克服自身重力来实现上下爬动,与此同时还能自主完成所需的特定任务。国内外对于爬杆机器人的研究有许多,并且近几年来机器人产业发展迅猛,一定程度上也促进了爬杆机器人的发展。
从国内外当前的发展来看,可以将垂直爬行机器人(爬杆)分为滚动式爬杆机器人、仿生式爬杆机器人、夹持式爬杆机器人以及吸附式爬杆机器人[3]。以上几种类型的爬杆机器人在此就不一一赘述它们的具体工作特点。这里简要说明其优缺点,如表1.1所示。
运动方案 | 优点 | 缺点 |
滚动式 | 速度快且平稳,控制简易 | 只适用直管,无越障能力 |
仿生式 | 性能优越,适应性强 | 运行复杂,暂时无法用于工业领域 |
夹持式 | 越障能力较强,适用于多种情况 | 结构以及控制都较为复杂,速度上有所欠缺 |
吸附式 | 克服重力能力强,使机器人稳定 | 要求壁面光滑或者需要壁面为特殊材质 |
表1.1 运动方案比较
 湖北工业大学的张铮,杜鹏,贾勤三人发明设计了一种轮式爬杆机器人,整体结构上包含外框架和连接在外框架周围的三个爬行机构,如图1.1所示,这种轮式爬行机器人依旧存在适应性差,适用面窄的问题,而且结构较为复杂。
湖北工业大学的张铮,杜鹏,贾勤三人发明设计了一种轮式爬杆机器人,整体结构上包含外框架和连接在外框架周围的三个爬行机构,如图1.1所示,这种轮式爬行机器人依旧存在适应性差,适用面窄的问题,而且结构较为复杂。
图1.1 轮式爬杆机器人
位于美国的伊利诺伊理工学院、卡耐基梅隆大学、斯坦福大学及宾夕法尼亚大学等,经过合作交流研究,最终研究发明了一种仿生学六足攀爬机器人RiSE 系列[4]。如图1.2所示,该机器人拥有左右各三只足,在应对圆杆表面情况多变这一问题时,能够得到很好的解决,但也存在控制较为复杂这一问题,六足独立控制增大了工作量。
由以上所述,可以看出国内外对垂直爬行机器人(爬杆机器人)的研究有一定的基础,
但目前仍缺少一个较为完善的方案,因此在此基础上对于爬杆机器人的研究值得进一步深入。
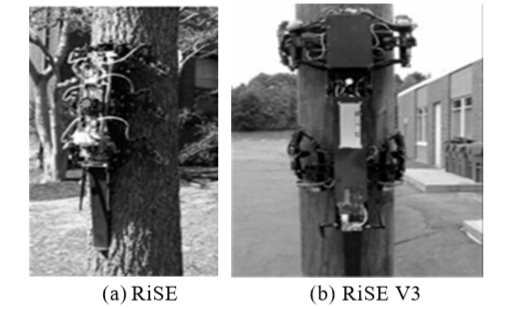 图1.2 RiSE系列机器人
图1.2 RiSE系列机器人
第2章 结构方案设计
2.1 垂直爬行仿生类研究
2.1.1 固定及移动结构
对于一个垂直爬行机器人(爬圆杆类)来说,想要实现在一根圆柱杆上自由上下升降移动,所必需的结构为固定结构以及移动结构,固定结构用于提供机器人整体能在圆杆上保持稳定所需的摩擦力,而移动结构则需要在固定结构的基础上,实现机器人的上下移动。一般情况来说,固定结构有吸附式和夹持式这主要的两种,吸附式包括:类真空泵、永磁体或者电磁铁吸附等方式,夹持式则有机械爪(机械臂)或者梯形自锁装置等方式[5]。
2.1.2 仿生运动分析
 本次设计为基础性探索设计,因此可能存在一些不甚完善的方面。从仿生学的角度来看,大自然中有许多可以爬树的动物如老虎、狮子等猫科动物、熊猫、猴子等等,当然也包括人类。
本次设计为基础性探索设计,因此可能存在一些不甚完善的方面。从仿生学的角度来看,大自然中有许多可以爬树的动物如老虎、狮子等猫科动物、熊猫、猴子等等,当然也包括人类。
图2.1 老虎爬树
从以上所述的几种动物(以哺乳动物为主要对象)来看,它们在爬树这种行为上,大部分都是通过上肢以及下肢攀附在树干上,再通过自身多部位肌肉的发力,使得整个身体能够克服重力向上运动。以老虎的爬树方式为例,通过相关资料的查询,观察相关视频,如图2.1,可以发现老虎在爬树时很多时候采用的是跃进式。老虎从地面到树干上的第一步是通过跳跃的方式直接使自身的四肢几乎在同时都攀附在树干上,之后的上升过程也采用了类似的方式,其通过肌肉的发力于四只爪子,产生向上的冲力用于克服重力,与此同时松开上肢上升后再抓紧树干,随后下肢松开树干然后向上移动,并且之后的攀爬过程也是重复这一系列动作。因此,老虎在整个爬树的过程,有一个关键的细节,在一段极短的时间里,老虎的整个身体是仅依靠上肢抓紧树干来克服自身重力的,身体的其他部分处于完全腾空的状态,没有任何的实体接触,其克服重力的上升过程依靠的是作为顶级掠食者所拥有的相当力量和其锋利的虎爪以及完美而精湛的动作衔接。老虎可以利用自身的肌肉实现克服重力,并且在上升动作完成后能通过虎爪稳定地固定在树干上,这种动作实行起来相当的迅速,可以让老虎的爬树十分迅速,当然难度也是相当的高,对于设计一款垂直爬行机器人,让它在爬升过程还有一段时间大部分处于完全腾空,更是难上加难。
 当然,哺乳动物的爬树方式不仅仅只有这一种,例如熊猫的爬树方式(如图2.2),对于本次垂直爬行机器人的设计就十分有帮助,不同于老虎通过自身力量和技巧实现快速爬树这一动作,虽然熊猫的爬树动作比较缓慢,但是也更加的稳健。熊猫在爬树的时候大体上也是利用爪子攀附在树干上,然后通过肌肉的发力实现向上攀爬,但其不同点在于熊猫在攀附在树干上时,其每次动作只运动一只爪子,这样可以保证在爬升的过程中,另外三只爪子能够稳固的抓在树干上,这样每只爪子所需要提供的克服重力的摩擦力就相对老虎较小。并且在整个攀爬过程中,不同于老虎有大部分身体完全腾空的状态,熊猫的自身重量始终有三只爪子用于支撑,从而使这个过程更加稳定。虽然熊猫的爬树时间相较于老虎更长,但是其爬树过程更加稳健的特点对于垂直爬行机器人的设计来说更具有参考价值。
当然,哺乳动物的爬树方式不仅仅只有这一种,例如熊猫的爬树方式(如图2.2),对于本次垂直爬行机器人的设计就十分有帮助,不同于老虎通过自身力量和技巧实现快速爬树这一动作,虽然熊猫的爬树动作比较缓慢,但是也更加的稳健。熊猫在爬树的时候大体上也是利用爪子攀附在树干上,然后通过肌肉的发力实现向上攀爬,但其不同点在于熊猫在攀附在树干上时,其每次动作只运动一只爪子,这样可以保证在爬升的过程中,另外三只爪子能够稳固的抓在树干上,这样每只爪子所需要提供的克服重力的摩擦力就相对老虎较小。并且在整个攀爬过程中,不同于老虎有大部分身体完全腾空的状态,熊猫的自身重量始终有三只爪子用于支撑,从而使这个过程更加稳定。虽然熊猫的爬树时间相较于老虎更长,但是其爬树过程更加稳健的特点对于垂直爬行机器人的设计来说更具有参考价值。
图2.2 熊猫爬树
通过以上两种不同哺乳动物爬树特点的分析比较,可以清晰的认识到同样是爬树这一行为,不同的动物所采用的运动方式也不尽相同,同时对于这次的仿生学分析,也为接下来的机器人机械结构设计提供了帮助。
2.2 机械结构设计
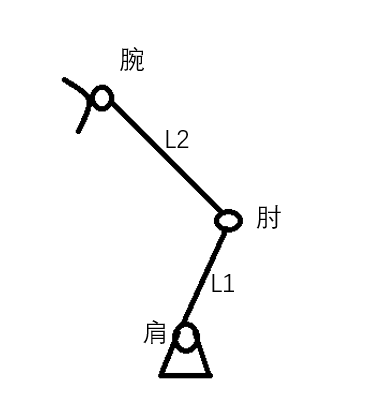
2.2.1 机械臂(爪)结构分析
从前文对哺乳动物攀爬行为的分析,包括人类在内,大部分的爬树动作主要运用的身体部位是四肢,通过四肢与树干接触并施加压力从而产生摩擦力以克服重力,再运用自身肌肉的力量使身体上升,随后再向上移动四肢的位置,以此循环完成垂直爬行的功能,当然下降也是如此道理。由此便可得到设计垂直爬行机器人(爬杆)的启发。
从仿生学的角度来看,爬杆机器人采用夹持式的固定结构似乎更为合理,一方面是采用夹持式的固定结构,可以使用机械臂与机械爪为主要部件,这种结构具有较强的越障能力,在应对不同类型的圆柱形杆件时可以分别采用合适的方案,如当表面为较为光滑的电线杆时,此时采取夹持式或者吸附式都有其优点以及可取之处,但是如果需要设计的垂直爬行机器人还能进行爬树这一动作的时候,此时吸附式的缺点便暴露无遗。由于这个世界上树木的种类相当繁多,并且在不同树干的表面情况也是不一样的,即使是同一种树木,其表面粗糙度,表面生长情况也是不相同的,此时就无法采用永磁体吸附或者电磁铁吸附的方式了。而对于夹持式来说,在面对较光滑圆杆的情况时,可采用装备有橡胶的机械爪,而对于粗糙度较大的树干来说,就可以采用锯齿状的机械爪,从而仿照生物爬树的原理,实现垂直爬行的功能。
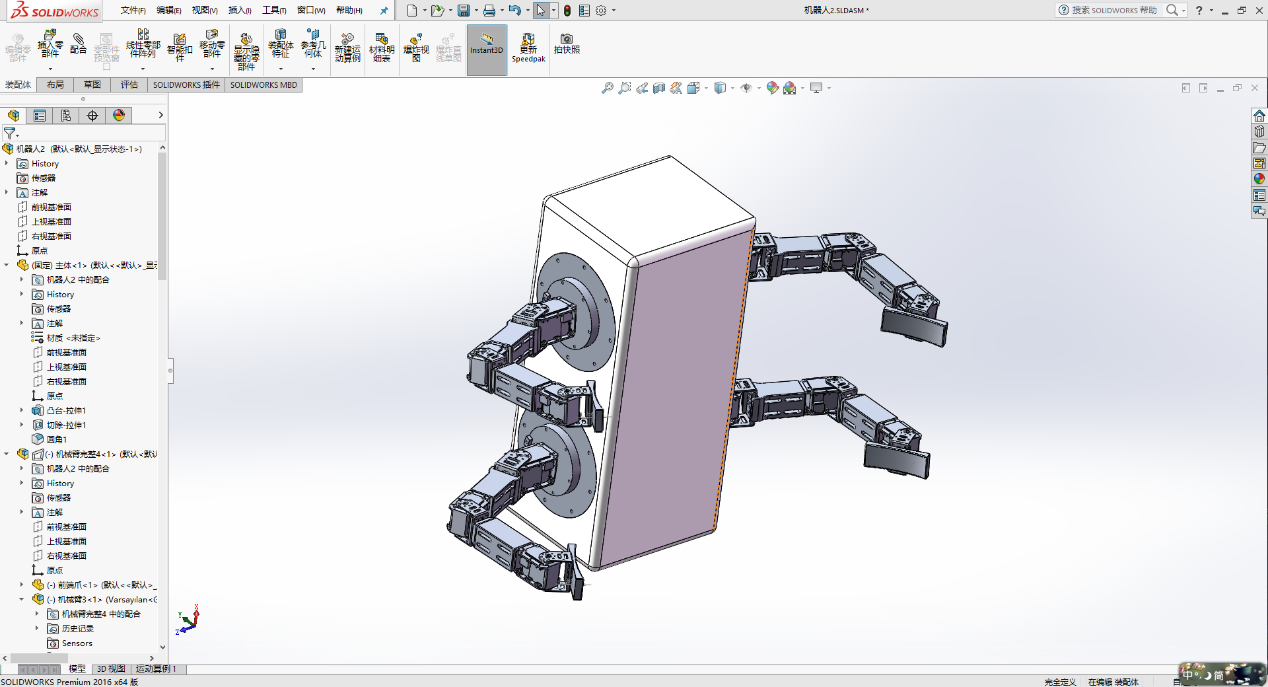
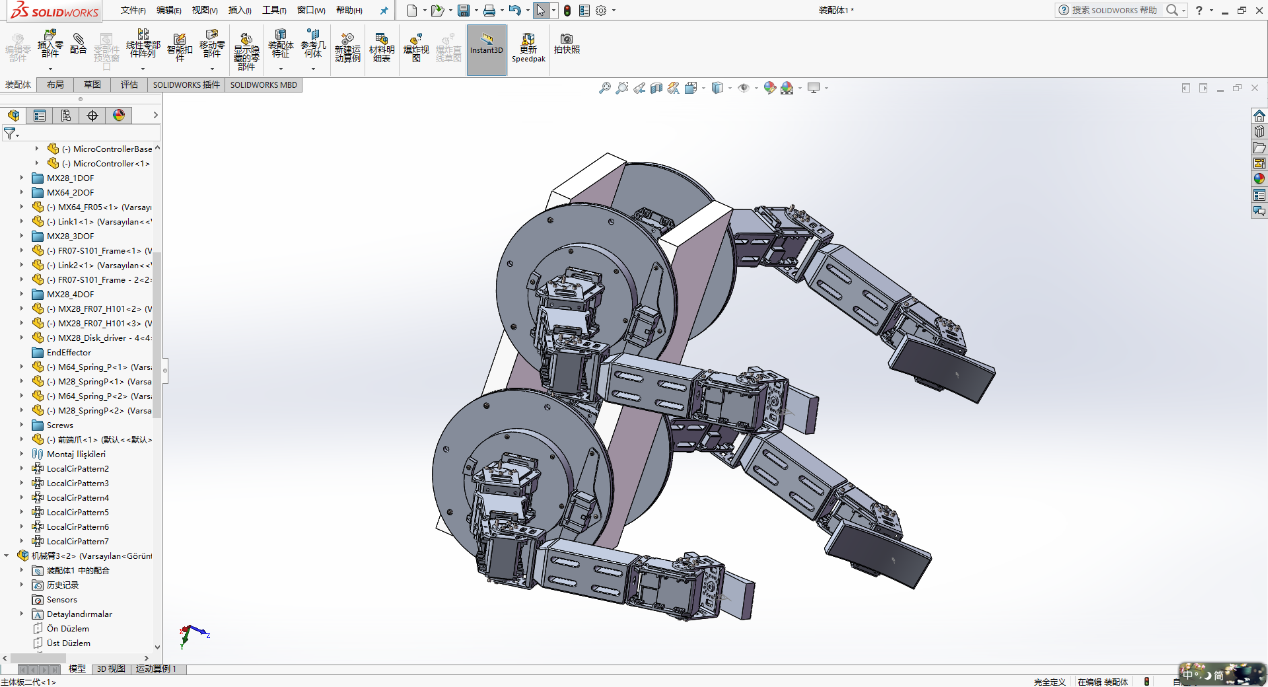
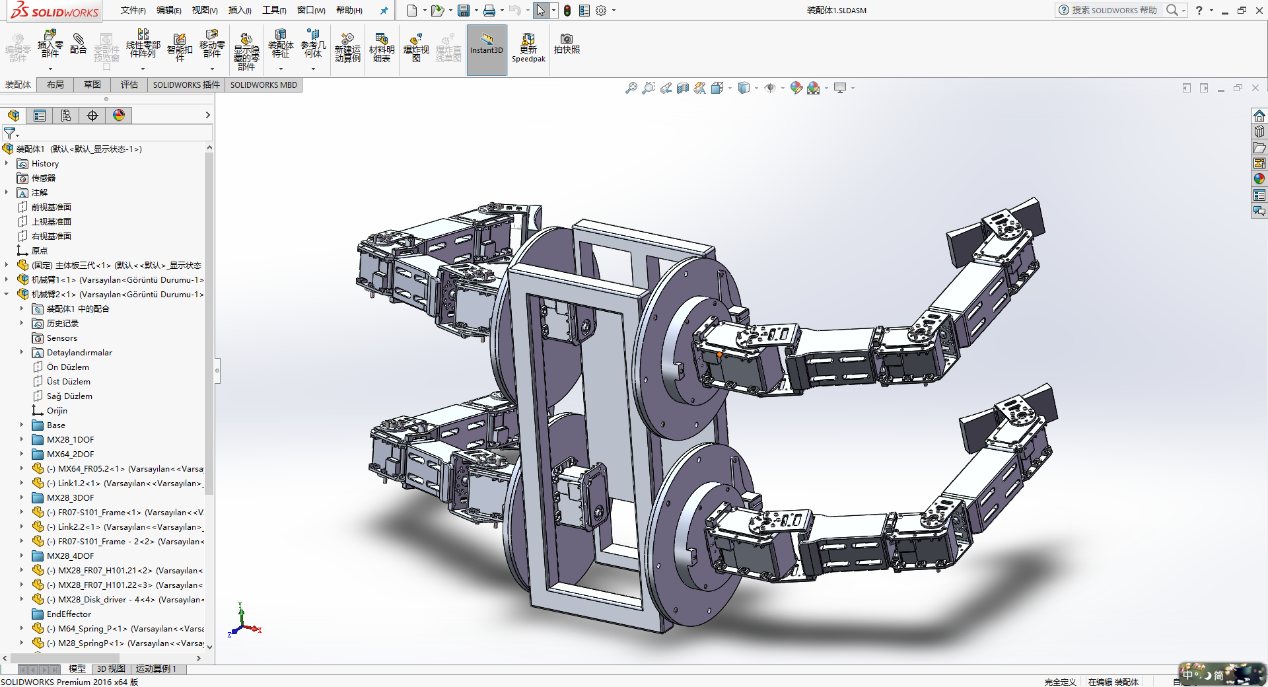
 因此,本次设计垂直爬行机器人的主要原则就是以机械臂以及机械爪为主要部件,通过主体部分将多个机械臂连接在一起,从而实现类似于熊猫那样的爬行动作。
因此,本次设计垂直爬行机器人的主要原则就是以机械臂以及机械爪为主要部件,通过主体部分将多个机械臂连接在一起,从而实现类似于熊猫那样的爬行动作。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: