双足行走机器人结构设计与分析毕业论文
2020-02-17 20:50:28
摘 要
本文就双足机器人的结构设计与运动仿真分析进行了探讨。首先使用solidworks绘制多自由度、多舵机的双足机器人三维模型,然后导入adams进行运动仿真,避免了adams建模的不精确性和solidworks运动仿真复杂性。运动控制方面是通过基于仿生学步态规划方法,对模型的步行规划和控制进行研究。最后结果得到一个完整的能够前向侧向稳定行走的双足机器人虚拟样机,对双足行走机器人从科学研究向生产力转变起到促进作用,为双足机器人的进一步研究提供基础。
关键词:双足机器人;结构设计;步态规划;单片机控制;运动仿真分析
Abstract
In this paper, the structural design and motion simulation analysis of the biped robot are discussed. Firstly, the 3D model of the biped robot with multi-degree of freedom and multiple servos is drawn by solidworks, and then the animation is introduced into the motion simulation, which avoids the inaccuracy of the adams modeling and the complexity of the solidworks motion simulation. The aspect of motion control is to study the walking planning and control of the model through the method based on bionic gait planning. Finally, a complete virtual prototype of biped robot capable of forward and lateral stability walking is obtained, which promotes the shift from scientific research to productivity of biped walking robot, and provides a basis for further research of biped robot.
Key Words:Biped robot; Structural design; Gait planning; Single chip control; Motion simulation analysis
目 录
第1章 绪论 1
1.1 研究背景及意义 1
1.2 国内外研究现状 1
1.2.1 国外研究现状 1
1.2.1 国内研究现状 3
1.3 课题研究内容 5
第2章 双足机器人的结构设计 6
2.1 人体运动仿生分析 6
2.1.1 人体上肢运动分析 6
2.1.2 人体下肢运动分析 7
2.2 双足机器人结构总体设计方案 8
2.2.1 机器人零部件三维模型设计 8
2.2.2 机器人整体装配 14
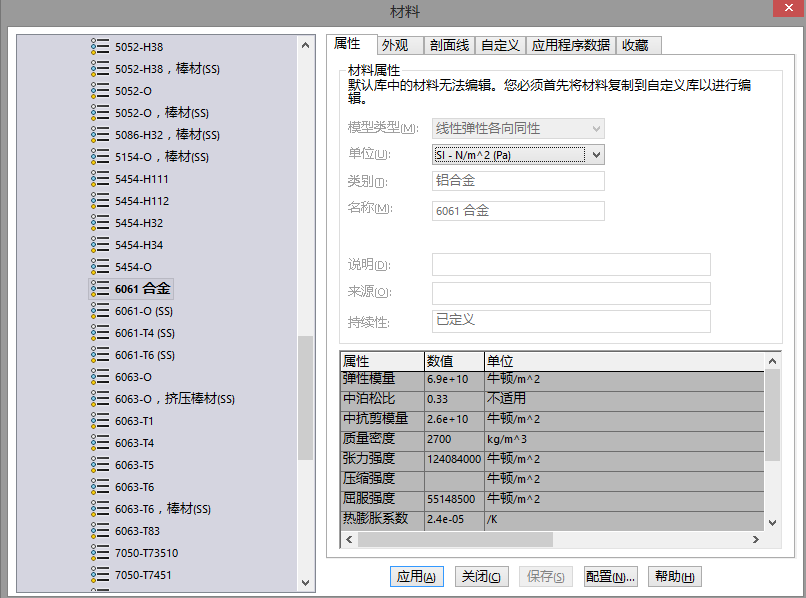
2.3 零部件材料及选型 15
2.3.1 零部件材料的选择 15
2.3.2 驱动元件的选择 16
2.4 本章小结 20
第3章 双足机器人步态规划 21
3.1 步态规划方法简介与选择 21
3.1.1 基于仿生学的步态规划方法 21
3.1.2 基于智能学习算法的步态规划方法 21
3.1.3基于数学模型的步态规划方法 22
3.1.4 步态规划方法选择 22
3.2 基于仿生学的步态规划 22
3.2.1 人体步行周期分析 22
3.2.2 机器人前向行走步态轨迹分析 24
3.2.3 27
3.3 本章小结 29
第4章 双足机器人的控制方式 30
4.1 舵机的工作原理 30
4.2 32路舵机控制器 31
4.3 单片机与控制指令 32
4.4 本章小结 33
第5章 基于adams的运动仿真 34
5.1 ADAMS简介 34
5.2 模型的导入与简化 34
5.2.1导入模型 34
5.2.2 简化模型 36
5.3 建立约束 37
5.4 添加驱动 37
5.4.1 前向行走的驱动参数 37
5.4.2 侧向行走的驱动参数 37
5.5 仿真结果与分析 38
5.5.1前向行走仿真结果与分析 38
5.5.2侧向行走仿真结果与分析 40
5.5 本章小结 42
第6章 结论与展望 43
6.1结论 43
6.2 展望 43
参考文献 44
致 谢 46
附录A 47
附录B 48
第1章 绪论
1962 年,世界第一台工业机器人在美国降生,机器人科技已经有了五十余年的发展历史。机器人从工业机器人发展至智能机器人,研究的内容涉及机械、控制、电子、传感器与驱动、生物等多个领域。其中双足机器人有着十分宽广的应用范围,应用价值巨大。因此我将通过计算机技术完成对一个可以稳定行走的17自由度双足机器人的设计。
1.1 研究背景及意义
人类生活中又或者自然界中,存在着可能危机人类健康或人类没有办法到达地方,如危险工地,火灾现场等等,针对这些复杂环境深入和探索往往需要有机器人的参与,我们需要机器人能够代替人类进入这些危险且情况复杂的环境。而且,在其他方面,如航空航天、交通运输、维修保养等,机器人也可以将人从重复、枯燥、高精度的工作中解放出来,实现高度的自动化。
机器人有轮式机器人、履带机器人、足式机器人等,足式机器人又包括双足机器人、四足机器人和多足机器人[1]。与轮式机器人或履带机器人比较,足式机器人能够灵活地行走于坎坷、多变的地形;而轮式机器人容易困在行走表面光滑、地表复杂的环境中,履带机器人容易受困于落差较大的地方。双足机器人具备更好的灵活性,在规避障碍物方面很出色[2]。通常,自由度越高,其成本越高。所以双足机器人性价比高于多足机器人,研究双足机器人是未来的大趋势。同时,对双足机器人的研究,还能够推动仿生学、机械工程学、人工智能及控制学等多学科的发展,甚至还可以帮助我们探索认知人类的运动原理。
1.2 国内外研究现状
1.2.1 国外研究现状
双足机器人的研究始于美国通用公司的名为“Rig”的操纵型双足步行机器人,该机器人诞生于1968年,拉开了双足机器人研究的序幕。Rig是一个自由度很低的双足机器人,只有腿部的踝、髋关节[2]。1968~1969年,南斯拉夫的著名科学家M.Vukobratovic稳定判据(MP)理论,这个理论将双足机器人的研究推向了新的高度,并成功研制出第一个具有真正意义的双足机器人[3]。
除了美国,日本的双足机器人研究科技也十分发达,在20世纪取得了卓越的成绩。早稻田的大学教授加藤一郎带领的小组在1968年研究出了WL系列和WABIAN系列双足机器人。WABIAN-2不但能够像人类一样活动全身关节,颈、腰、四肢、手掌,并且还能做
各种复杂的表情,如喜、怒、悲。它还能够令膝盖弯曲,灵活地活动自己的脚掌。因其逼真的行走方式,被广泛应用于研讨人类病理学,进而有助于医疗健康的发展 [4]。


图1.1 WL-16双足机器人

图1.2 WABIAN-2
日本双足机器人中最惊艳的当属本田公司的ASIMO,从1986到2012,阿西莫经历了14次左右的更新换代。2012版本all-New ASIMO拥有了视觉与听觉的能力。2011版的ASIMO奔跑速度大幅提升,其出色的平衡控制系统能够让它以9km的时速进行奔跑[5]。灵活度也大幅度提高,增加了全身的可动关节数,自由度由23变为57。如今,它仍然是双足机器人的代表之作。

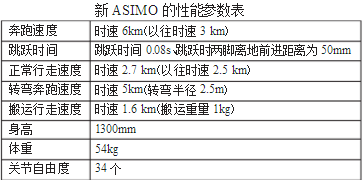
图1.3 ASIMO及2011版本的性能参数
同样作为惊世之作的双足机器人Atlas诞生于美国波士顿动力,不同于ASIMO的小巧,Atlas身材高大,1.75m,重约80kg。它能够行走在各种地形,双手还可以实现开门和抓取物体,其控制相当稳定甚至可以实现后空翻动作[6]。当受到工作人员的推搡时,它可以很快将自己的身体稳住。如果受到的推力比较大以至于机器人摔倒,它还可以自动从地上利用双臂爬起来。另外,它身上具有极多的传感器,能够自动识别物体从而避开障碍[8]。在17年,它还完成了后空翻的动作,落地时受到冲力较大还能够自行稳住脚步,可见其平衡系统做的多么出色[9]。
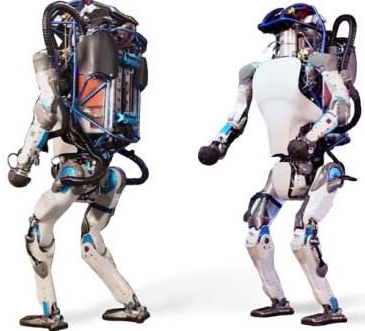
图1.4 Atlas
1.2.1 国内研究现状
国内双足行走机器人的研究起步较晚,但发展非常迅速。从1988年开始,先是国防科设计并制作出具有六个可动关节的双足机器人。随后清华大学、哈工大、北理工、中科院沈阳自动化所等科研单位都展开了对双足机器人的研究,得到了不错的成果,如哈工大研制出HIT系列双足机器人,北理工研制出BHR系列双足机器人,目前两者仍在不断更新换代[10] [11]。
近些年来,国内一些企业也开始进军双足机器人领域。譬如,钢铁侠科技于2015年成立,它是我国双足机器人企业研究的代表。2017年世界机器人大会上,钢铁侠科技展位上出现了ART双足大仿人机器人,此前双足大仿人机器人的科技一直被外国企业或研究机构所占有[12]。
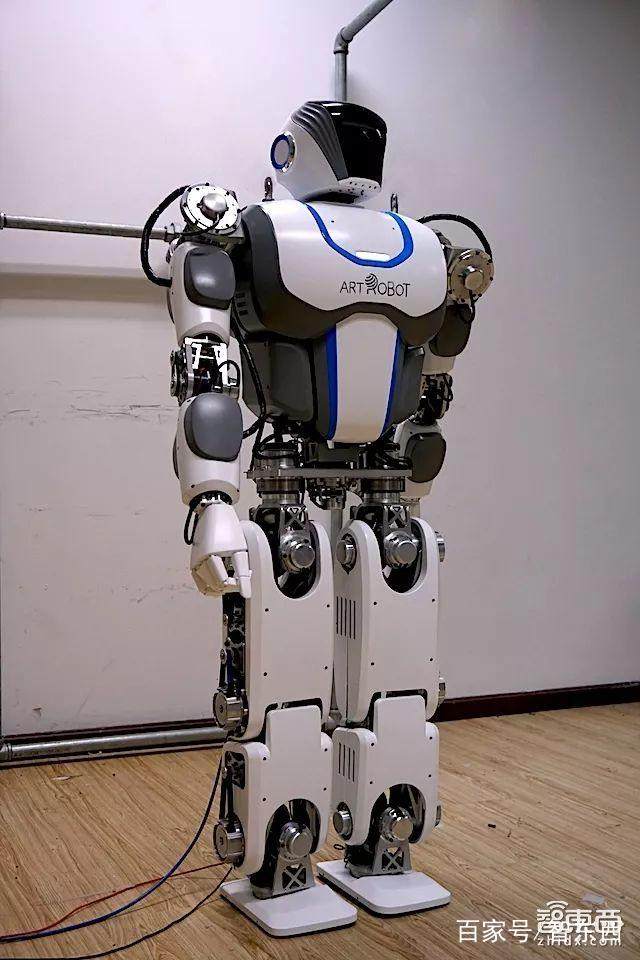
图1.5 ART
优必选在CES 2018 上展示的双足机器人Walker,高约1.3m,其行走自由度极高,除了能够上下楼梯,还可以踢足球、跳舞。作为娱乐机器人,它可以按照编程进行跳舞,所以用户能够设计不同的舞姿。Waker是一个智能家庭管家,相当于《钢铁侠》中的贾维斯,能够实现控制智能家居、远程监控、播放音视频、咨询问题等等[13]。

图1.6 Walker
将国内与国外的研究进行对比,无论是研发时间还是投入资金,中国要比美国、日本少很多。虽然轮式机器人和工业机器人是目前世界上应用最多的机器人,但双足机器人的重要性我们不能忽视。我们需要加大对双足机器人的研发投入,逐渐缩小和工业强国之间的差距,赢得未来智能机器人研究的话语权。
1.3 课题研究内容
本文根据仿生学,通过soildworks设计能够实现正常行走的高自由度双足类人机器人外观结构,并对结构的材料和驱动方式进行选择,再设计出对驱动元件的控制系统。最后根据人类步行的仿生学方式对双足机器人进行步态规划,并用ADAMS构建运动副和各种约束,对其进行步态仿真模拟,验证结构和步态规划的可行性。
第2章 双足机器人的结构设计
本章先通过研究人体正常行走时各个关节的运动状态,来确定本机器人的自由度数量和分布。再来通过solidworks构建出机器人最终结构的三维模型。最后选择结构的材料和驱动装置。
2.1 人体运动仿生分析
双足机器人一般是仅有下肢的机器人,为了使整个机器人更加完美和更容易保证平衡性,我设计机器人结构时加入了上肢系统。现需要结合人体行走运动机理,对人体上下肢的结构进行分析,来确定双足机器人的自由度和舵机的分布。
人体运动仿生分析可分为上肢(肩、肘、手)的运动和下肢(髋、膝、踝)的运动。
2.1.1 人体上肢运动分析
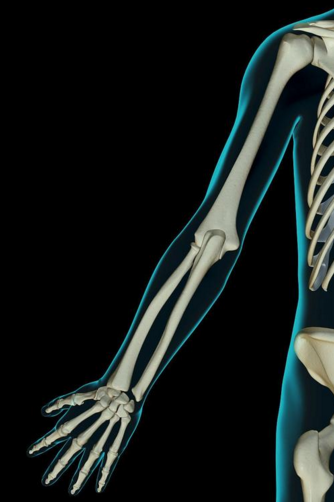
图2.1 人体上肢骨骼与关节示意图 来自视觉中国
如图2.1,机器人的上肢可以分成两个运动关节;肩关节两个自由度,肘关节一个自由度(因为暂未涉及手的运动,所以腕关节不作考虑)。
肘关节
肩关节
图2.2 机器人上肢自由度示意图
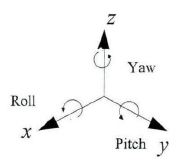
肩关节有一个偏转(Yaw)和一个俯仰(Pitch)自由度,肘关节仅有一个偏转(Yaw)自由度。肩关节的两个自由度采用串联的方式连接。
2.1.2 人体下肢运动分析
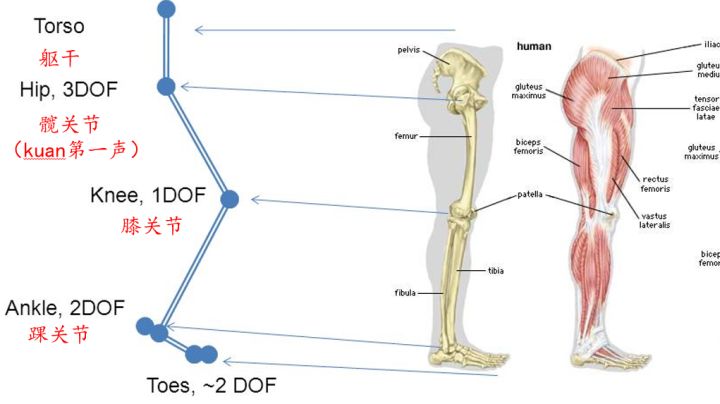
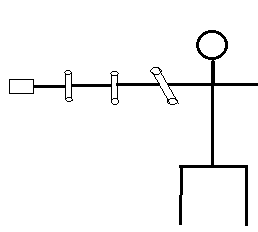
图2.3 机器人单腿运动关节(JOINT)排布和自由度数量(DOF)分配 来自解剖学
如图2.3所示,目前我们一般把机器人单腿分成三个运动关节:髋关节: 带有3个自由度;膝关节:带有1个自由度;踝关节:带有2个自由度;
翻滚
俯仰
偏转
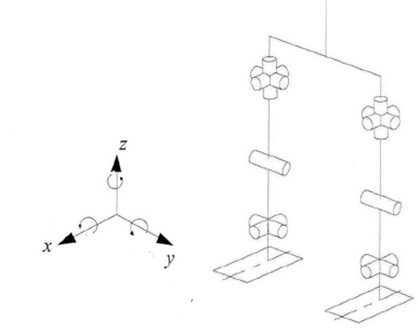
图2.4机器人下肢自由度示意图
如图2.4所示,双足机器人的自由度分布很直观了,髋关节有三个自由度,分别是俯仰、翻滚、偏转;膝关节只有一个俯仰自由度;踝关节有两个自由度,俯仰和翻滚。本文中设计的双足机器人主要产生前向和左右行走,因此髋关节有两个自由度:俯仰、翻滚。其中髋关节和踝关节的两个自由度都采用串联的方式。
2.2 双足机器人结构总体设计方案
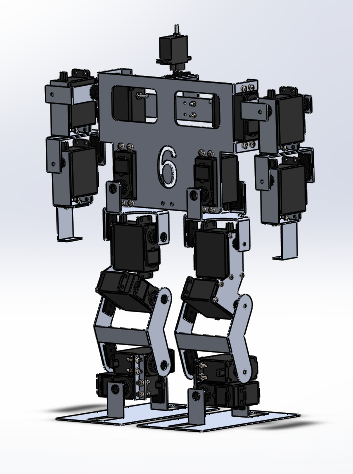
与其他仅仅为了模拟步行的双足机器人不同,本机器人加入上肢运动系统,因此整体机身自由度大大提高了,17个自由度意味着一共需要17个舵机。整体结构的设计也较为复杂,因此结构设计应该先绘制出各个零部件的草图,再做出三维模型,最后进行装配与配合处理。
2.2.1 机器人零部件三维模型设计
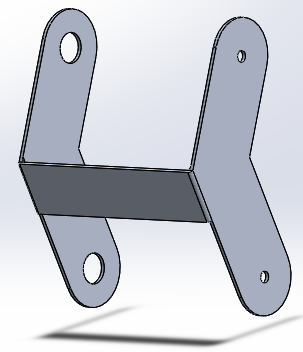
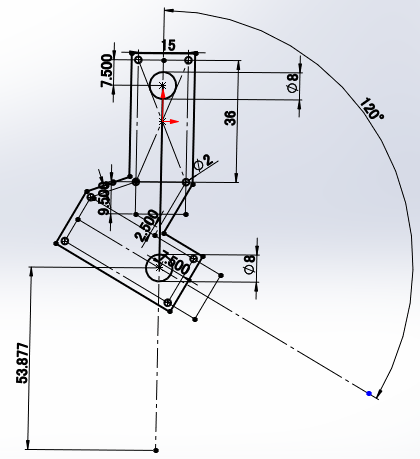
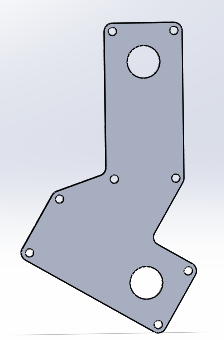
先绘制各个零件的草图,再通过拉伸切除等操作做出三维模型。脚板,小腿,大腿,舵机1,舵机1支撑件,舵机2,舵机2支撑件,舵机连接件,髋关节,手臂1,手臂2,手臂3,手,胸部。各个零部件如下图所示。
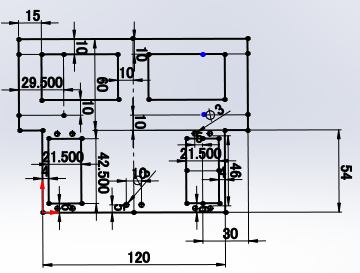
脚板是双足机器人的承重元件,为了维持机器人行走过程中的稳定性,设计略微大一些。如图2.4,为了装载一个舵机,设计了两个半径不同孔,此舵机作为踝关节负责脚板
的左右摆动。长宽尺寸为135mm×74mm,还有两个30mm×18mm的镂空部分,可以使脚板结构变得更加轻,有利于机器人快速行走。
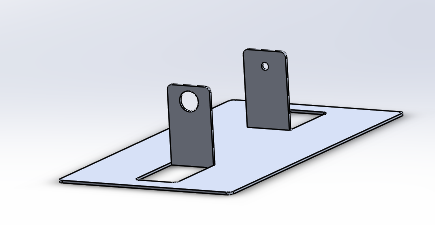
图2.5 脚板
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: