结构化道路图像处理与识别技术研究毕业论文
2020-02-24 14:07:43
摘 要
IAbstract II
第一章 绪论 1
1.1研究背景和意义 1
1.1.1研究背景 1
1.1.2研究意义 2
1.2国内外现状 3
1.2.1国外现状 3
1.2.2国内现状 4
1.3本文主要研究内容 5
第二章 图像获取和预处理技术 6
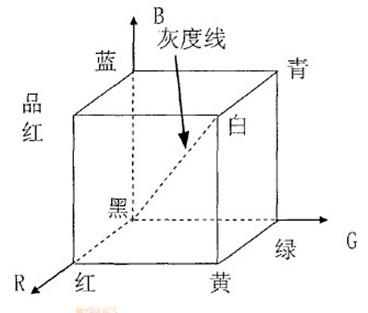
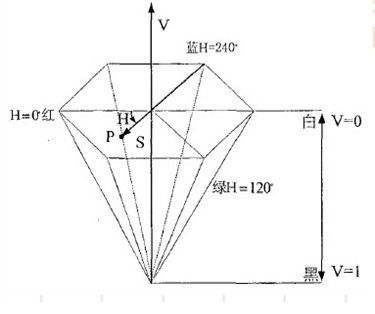
2.1数字图像及图像彩色模型 6
2.2图像采集方式 8
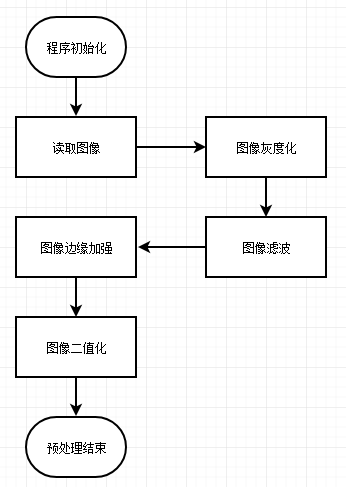
2.3图像预处理技术 8
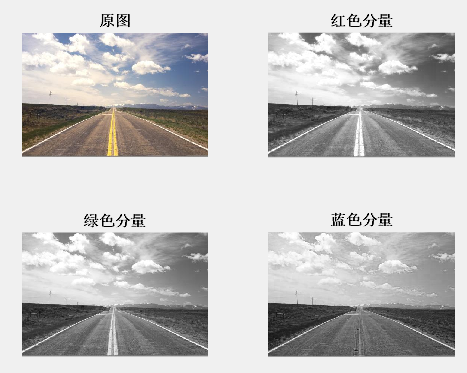
2.3.1图像灰度化 9
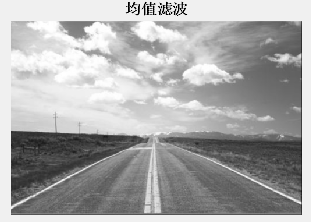
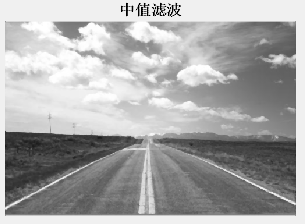
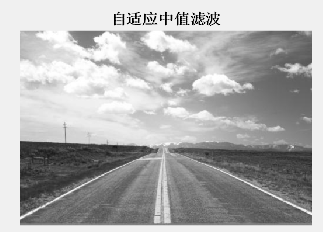
2.3.2 灰度图像滤波 12
2.3.3 边缘提取 16
2.3.4 图像二值化 20
2.4本章小结 23
第三章 结构化道路标识特征及识别方法分析 23
3.1结构化道路及其特征 23
3.2交通标志及其特征 24
3.2.1交通标志分类 24
3.2.2交通标志特征 27
3.3图像识别技术分析 28
3.3.1霍夫变换检测车道线 28
3.3.2色彩空间检测交通标志 30
3.4本章小结 30
第四章 图像识别验证系统设计开发 31
4.1软件整体结构设计 31
4.1.1车道线识别 31
4.1.2 交通标志识别 32
4.2软件运行流程 32
4.3关键代码设计 34
4.4典型路况及标识实验 36
4.4.1 结构化道路车道线处理识别 36
4.4.2 结构化道路交通标志处理识别 37
4.5本章小结 39
第五章 结论与展望 40
参考文献 40
致谢 42
摘 要
随着汽车工业的发展,网联化、智能化汽车将人们逐渐从人工驾驶中解放出来,同时还能更大限度上保护人们的生命和财产,其中,结构化道路图像处理和识别技术是汽车网联化和智能化应用的重要研究方向之一。
本文研究了结构化道路图像预处理(图像灰度化、图像滤波去噪、图像边缘提取、图像二值化)、车道线标识以及交通标志识别相关技术。首先,使用图像传感器收集在高速公路上或类似于高速公路的结构化道路上行驶的车辆前方图像。其次,在车道线检测方面,采用图像预处理技术处理含有明显车道线标识的图像,得到车道线凸显的二值图像后,利用具有极坐标参数约束的Hough变换识别基于分段直线模型的车道线;在交通标志识别方面,利用彩色通道提取法处理结构化道路中含有交通标志的图像并进行形态学处理,然后用设定参数的模型进行比对,识别出交通标志。本文为了研究结构化道路图像处理与识别技术,及提供快速结构化道路图像识别验证,设计了一种专用结构化道路图像识别系统。
目前基于图像处理与识别的驾驶辅助系统较多,例如车道线偏离预警系统、碰撞缓冲系统等。本文中将多种图像预处理方法整合在一起,为基于图像处理的结构化道路识别研究提供了技术参考,同时提出了一种快速检验结构化道路图像识别效果的离线测试程序,为基于图像识别的结构化道路研究提供了一种快速验证技术支持。
关键词:结构化道路;交通标志;图像预处理;图像识别;
Abstract
With the development of the automobile industry, "network-linked" and "intelligent" vehicles have gradually liberated people from "manual driving" while protecting people's lives and assets to a greater extent. Among them, structured road images Processing and recognition technology is an important research direction for the “networking” and “intelligence” of automobiles.
This paper studies the preprocessing of structured road images (image graying, image filter denoising, image edge extraction, image binarization), lane markings, and traffic sign recognition related technologies. First, image sensors are used to collect images of vehicles in front of highways or on structured roads similar to highways. In terms of lane detection, image preprocessing techniques are used to process images with marked lane markings. After the binary image of the lane line is highlighted, the lane line based on the segmented line model is identified by using the Hough transform with polar coordinate constraints; in the traffic sign recognition, the color road extraction method is used to deal with the traffic signs in the structured road. The images were processed with morphology and then compared with the model of the set parameters, and finally the traffic signs were identified.
There are many driving assistance systems based on image processing and recognition, such as lane departure warning systems, collision buffer systems, smart camera systems with object detection and image correction. The research in this paper will provide technical support for image recognition research in driver assistance systems. In this paper, a variety of image preprocessing methods are integrated to provide a more convenient reference for structural road recognition research based on image processing. At the same time, an offline test program for quickly verifying the effectiveness of structured road image recognition is proposed. The structured road research of image recognition provides a fast verification system.
Key words: Structured roads; traffic signs; image preprocessing; image identification ;
第一章 绪论
1.1研究背景和意义
1.1.1研究背景
1886年,戴姆勒-奔驰公司创始人发明了第一辆汽车,从那时起,汽车行业经历了100多年的发展。100多年来,人们对车辆的要求不断提高,如车辆的外观、安全性、行驶性能和舒适程度等,这些要求也促使汽车工业不断升级,从而促进汽车融入千家万户中,有的家庭甚至保有多辆汽车。近年来,机器视觉、电子硬件、AI和大数据发展促使汽车更加安全化和智能化,国内经济形势的不断上升也造成了汽车保有量不断增加。据相关统计,2018年前,中国机动车保有量达3.1亿辆,其中汽车2.17亿辆;机动车驾驶人数达3.85亿人,其中有3.42亿人是汽车驾驶人员。[1]
新登记机动车数量达3352万辆,创下了历史新高。随着中国经济社会持续保持高速发展,机动车保有量将继续保持快速增长的形势。截至2017年底,中国机动车保有量达3.1亿辆。
图1. 1 近五年机动车新注册登记情况
基建道路的完善和机动车的大规模普及改善了人们的出行,但与此同时由此导致的交通事故已成为全球安全问题之一,不仅道路交通通行度会受到交通事故的影响,而且人民生命财产、物质以及精神也会受到其影响而造成损失。据统计,每年约有125万人死于交通事故,2000万至5000万人被卷入交通事故中,每天就有超过3400人死于交通事故,中国的汽车保有量目前仅次于美国,约占全球汽车总量的4%,但事故死亡人数却占世界交通事故死亡人数的1/5左右,是世界上交通事故相对严重的国家。
为了降低交通事故的发生率,各个国家地区除了采用加强安全教育这一措施外,还大力发展以智能交通(ITS)为核心的行车管理和安全辅助系统,它是综合将通讯传感技术、电子控制技术、信息收集处理技术等有效地综合运用于整个地面交通管理系统,进而建立的一种在大部分交通道路上具有精确、实时、高效的综合交通管理系统。在汽车方面上的表现,便是当下火热的驾驶辅助系统以及正在研发的自动驾驶系统,包括但不仅仅是先进驾驶辅助系统(ADAS):这个系统通过安装在车上的各种传感器采集道路环境信息,然后在规定时间内完成物体的识别、检测和跟踪等技术上的操作,进而提示驾驶人员在行车过程中的一些隐患,这是一种提汽车主动安全技术。在ADAS中,主要采用的传感器主要有摄像头、激光和雷达等,这些传感器通常位于车辆的前后保险杠、侧后视镜、驾驶舱内或者挡风玻璃上。在结构化道路图像处理和识别中,通常利用一个或两个摄像头来获取道路图像然后进行识别,摄像头是一种光感传感器,相较于激光和雷达传感器,摄像头在结构化道路图像处理和识别中更具优势。由于具有这个优势,基于视觉传感器的道路识别技术的潜在研究价值引起了全世界的高度关注。然而,视觉传感器也存在对可见光非常敏感的缺陷,并且在光度条件不足时会大大增加道路识别的难度,然而这些缺陷可以通过相应的图像算法进行补偿,以满足道路识别的效率要求。
1.1.2研究意义
奔驰汽车公司的研究表明:如果驾驶人员能够在事故发生1s前意识到即将发生的碰撞危险并采取有效措施,则绝大多数交通事故可以避免,在科技的不断发展下,这极其重要的1s逐渐从死神的手中被拉扯出来,现代驾驶辅助技术利用传感器,如激光传感器,毫米波传感器,摄像头获取车辆周围道路初步信息,然后经过汽车内部计算机的处理,形成可读的道路信息,在掌握这些信息的基础上,系统能够帮助人们应对一些突发情况,从而保护人民生命和财产。
在不久的将来,lv5自动驾驶汽车的出现将会颠覆现在的人工驾驶模式,并且未来的自动驾驶在智能交通系统的统筹下,交通事故的发生率将大大降低,本文主要研究结构化道路图像处理和识别技术,包括图像预处理技术、车道线识别和交通标志识别。
- 车道线识别技术是辅助驾驶技术及自动驾驶技术的核心之一,其地位至关重要。车道线识别的功能是监测行车路线,记录驾驶习惯,还可以实线车道线偏离预警(LDW),进而降低交通事故风险,与此同时也能使驾驶员不用时时刻刻保持高度集中,从而降低驾驶人员的驾驶压力,降低驾驶人员的疲劳强度。
- 交通标志识别技术作为一种辅助驾驶系统,能够帮助驾驶员快速捕捉车辆行驶前方所出现的交通标志,并做出相应的提醒,为驾驶员安全文明驾驶提供了一个更优良的环境。
- 结构化道路图像处理与识别技术作为汽车网联化、自动化的基础是一个重要的基础研究方向,本文提出的结构化道路图像处理和识别程序将为现有的结构化图像处理和识别算法提出了一个快速的结果测试方案。
- 目前有许多基于图像处理与识别的驾驶辅助系统,例如车道线偏离预警系统、碰撞缓冲技术、带物体检测和图像校正的智能摄像头等。本文中所涉及的图像处理与识别算法将对于这些驾驶辅助系统中的图像处理与识别研究提供参考。
1.2国内外现状
1.2.1国外现状
目前,最通常和成熟的道路图像处理与识别技术基本都是是基于机器视觉获取初步图像的方法。结构化道路图像中的车道标志线处理与识别技术包含对图像传感器获得的图像使用预处理技术,目的是去除大量对车道线识别有影响的噪声,然后再从图像中提取出车道线或道路边界信息。
结构化道路图像处理与识别技术的研究最早开始于美国和德国,自20世纪80年代起,随着科技的不断发展和国内外学者的不断研究,目前,具有代表性的结构化道路图像处理与识别技术包括RALPH系统、GOLD系统、LOIS系统、AutoVue系统、DSS系统[2]。
RALPH系统假设道路表面是一个平面,再采样逆透视变换(IPM)将摄像头获取的初步图像转变为俯视图,然后采用跟踪平行线的方式来识别车道线。GOLD系统使用立体视觉技术重建图像以检测车道线,但是这种方式计算量非常大,并且对处理器的性能有一定要求。RALPH系统可以快速识别曲线,但是在识别车道线方面不具有鲁棒性。LOIS系统通过分析道路弯道特性和定位车辆位置,将这些信息应用于几何参数空间,并采用最优解问题来识别车道线,但是这种处理方式在实际试验中耗费时间较长,实时性较差。DSS系统使用图像传感器获取的车道图像信息和其他传感器获取的行车特征等来协作共同识别车道线。AutoVue系统采用比较摄像头获取的图像中像素强度值的差异来完成车道线和边界线的识别。
由奔驰500SEL改装而成的VaMP实验车[3],其识别系统由两个层面组成。其中,道路识别与跟踪(RDT)层面利用回旋曲线模型探测车道线,并利用kalman滤波探测车辆运动状态和道路特征。障碍物检测与跟踪(ODT)层面用于探查周围的车辆,它涵盖了基于车辆对称性的单目标检测和基于车辆阴影的多目标检测两种算法。VaMP可以实现正常的车速以及方向保持、障碍物躲避、行车换道等功能,还附有识别交通标志信息并且采取相应措施的能力。在实验中发现,车道线的模糊以及阳光的直射等会增大车道线图像获取质量难度的因素是影响系统准确性的重要原因。
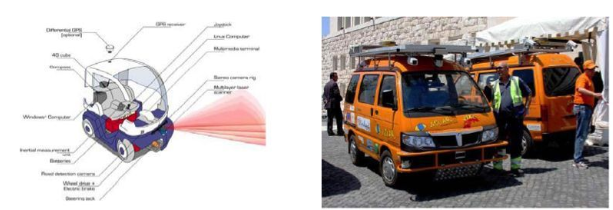
图1. 2 Parma大学智能车
美国Parma大学的ALVIN视觉系统[5]使用神经网络的方法直接使用道路信息来控制行驶车辆,这种系统首先需要进行人工训练学习,使系统得到训练好的参数,然后神经网络可以根据经过训练的系统来分析图像信息从而进行车辆控制,因此,经过高度训练的神经网络系统具有快速、鲁棒的优点。这些算法在结构上都比较简单,适合结构化特征较明显的道路识别。
Google公司于2010年在加利福尼亚州开展了无人驾驶汽车的自动驾驶实验[6],Google公司在这些无人驾驶汽车上搭载了激光反射系统、红外感知系统、GPS和差分陀螺仪角度系统。通过在车辆上方安装的激光发射装置发射激光,然后根据激光的反射时长计算车辆与障碍物之间的距离,图像传感器获取图像后,经过一系列的算法处理并建模,得出包含车辆和障碍物以及道路信息的模型,然后车辆决策系统根据模型来进行道路规划。
1.2.2国内现状
尽管中国在结构化道路图像和识别技术的研究起步不早,但目前的研发水平也赶上了国际先进水平,国内主要是各大高校的科研机构来支撑结构化道路图像处理和识别技术的研发工作,如清华大学、国防科技大学、吉林大学、重庆邮电大学等机构在结构化道路图像处理与识别技术方面的研究都取得了不错的进展。
吉林大学JLUIV系列智能车采用机器视觉系统获取图像,然后使用大律法将图像二值化,再在二值化图像中采集道路边界信息,最后利用回旋曲线模型生成车道线。国防科技大学研发的LDW系列智能车同样也是利用机器视觉采集车道图像,接下来用道路边缘提取和参数建模的方法识别车道线。清华大学THMR系列智能车[7]在获取道路环境信息后,然后使用双阈值法将图像二值化,后续处理采用增强转移网络技术,道路模型也是一种基于模型的道路识别方法,缺点是只能够对直线进行检测和识别,对弯道检测能力仍有待提高。
2014年10月,重庆邮电大学与长安汽车合作研发了一款具有自主知识产权的无人驾驶汽车[8]。该车通过遍布车身的摄像头和传感器采集道路图像,采集道路环境信息并综合利用从而完成对车道线、交通标志以及道路障碍物的识别,达到初步的无人驾驶。

图1. 3 长安汽车无人驾驶
总而言之,早期由于社会经济实力和科研能力的制约,中国结构化道路图像处理与识别技术普遍落后于世界发达国家。但我国从20世纪90年代起逐步发展自身的科研队伍,壮大科研能力并且伴随着中国经济的逐步发展和汽车普及进程的推进,中国在结构化道路图像处理与识别技术上的研究已经达到国际水平,与此同时,汽车的安全性研究也越发受到重视,而其中结构化道路图像识别与处理技术作为一项重点基本技术,必将得到更加飞速的发展。
1.3本文主要研究内容
本文主要研究基于单目视觉的典型结构化道路图像处理与识别技术,包括图像获取、图像滤波去噪、图像边缘提取、图像二值化,基于Hough变换的车道线识别方法,基于参数模型的交通标志识别方法。
(1)本文首先总结了本课题的研究背景和意义,并对国内外关于自动驾驶车辆和结构化道路图像处理与识别技术的研究现状进行了分析,阐明了目前基于机器视觉的道路识别系统研究现状、成果和不足,最后阐明本课题的主要研究内容。
(2)为了图像处理做准备,需要进行图像获取。阐明了数字图像及其在本文中的获取方式以及图像彩色模型分类,图像传感器采集的数据格式,然后具体分析数字图像的预处理:图像灰度化、滤波去噪、边缘检测、图像分割。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: