研究正向碰撞警示系统适应于驱动特性和公路交通环境外文翻译资料
2022-09-25 16:43:28

英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
研究正向碰撞警示系统适应于驱动特性和公路交通环境
2008年10月14-17日
自动化系统控制国际会议
韩国首尔
目录
1.介绍..............................................................................................................................................1
2.正向碰撞警告算法...................................................................................................................1
3.实验研究驾驶模拟器..............................................................................................................2
3.1 实验条件............................................................................................................................2
3.2 干燥路面条件实验..........................................................................................................3
3.3 潮湿路面条件实验..........................................................................................................5
3.4 分析预警时间换算成碰撞时间...................................................................................8
4.在城市道路的驾驶实验.........................................................................................................8
4.1 驾驶数据收集...................................................................................................................8
4.2 减速情况的分类...............................................................................................................9
4.3 司机的反应时间分析.....................................................................................................9
4.4 实验结果..........................................................................................................................10
5.结论............................................................................................................................................12
6.未来的研究..............................................................................................................................12
7.参考文献...................................................................................................................................12
8.致谢............................................................................................................................................12
摘要:正向碰撞预警系统针对的主要碰撞类型:汽车行驶或者停放时的追尾事故,这个覆盖了日本所有事故的30%。该系统的发展有助于道路还原事故的发生。许多碰撞警告算法最近已被提出并且在汽车市场开发,但他们在此基础上激活危急驾驶状况预碰撞安全系统的概念。今后,碰撞警告装置的设计应以促使早于当前预碰撞安全系统激活驾驶自己的机动刹车,以防碰撞,以及似是而非的事件。本文侧重于根据道路的摩擦系数和驾驶特性来说明正向碰撞预警算法。算法的有效性是通过驾驶模拟器实验和实验车在市区验证。
关键词:驾驶辅助系统、车载预警和控制系统、驾驶员行为、人 - 车接口
- 介绍
着眼于今天的主动安全装置,相当数量的车辆动态控制系统和驾驶辅助系统已经被开发很多年了,其中一些已经装备在车辆上进入市场。由于全自动化驾驶系统尚未在真实世界被广泛接受的情况下,人机界面驾驶辅助系统的设计,是为了获得在安全性互动机动系统和人类驾驶员手动控制两者之间令人满意的协同作用,这已成为驾驶员辅助系统研究的重大课题。例如,有几种正向碰撞警告算法,具有不同的辅助定时,现在在市场由不同的供应商开发。这些设备之间的协同控制的设计,它必须要适合驾驶员的行为或意图。过去的研究作品的作者给予理解,这是重要的,利用驱动数据在现实世界中的交通状况,以使系统激活更高级的,现实的和可接受大型客户。驾驶辅助系统的适应性基于实际驾驶数据库的文件的概念是由作者提出的。尤其是,在本文中,正向碰撞警告算法是基于个别司机的特点和路况提出的。首先,算法的有效性是通过驾驶模拟器实验,可以通过改变轮胎与路面摩擦条件重复地进行实验,而保证实验安全。接下来,将研究相关的碰撞预警定时的参数和所提出的碰撞预警算法来进行试验通过使用在城市道路驾驶中的车辆。最后,未来的研究问题从自然的城市道路行驶数据获得。
2.正向碰撞警告算法
本文提出了一个危险级别的指标当车辆接近前方车辆。在紧急制动时,公知的指数“碰撞时间”通常是在紧急情况中使用来表示正向碰撞危险水平。从正常的行驶记录仪获得的数据,碰撞时间约为10秒,这是不适合于在碰撞预警系统中使用。此外,碰撞时间是由相对距离除以相对速度不能包括个人的驱动特性和公路条件(摩擦系数)来计算的。有必要改变在不同的道路状况下的警告系统的定时,如道路湿滑,结冰的路面,以及驾驶员状态如正常,注意力不集中,昏昏欲睡等。这样的指数有潜力提供预警的适应性功能设计,可以提高司机接受的可能性。关键的预警距离RW上的车辆的相对距离可以被表示为下面的等式:
Rw =tau;r V2/2a – V2p/2ap Rstop
在这里,tau;r表示驾驶员的制动反应时间,在速度V时,车速Vp表示前方车辆速度,a表示主机车辆减速纵向,ap表示前方车辆纵向减速,Rstop表示两辆车停止时的相对距离(STOP =2.0M)。在这里,tau;r,是预警指标参数值这依赖于驱动特性和驾驶行为。 在本文中,计算警告距离的值时,主车辆和的加速度前方车辆被假定为最大减速可被计算为以下表达:a=ap=ug。在这里,mu;指示道路摩擦系数假定为已知时,g表示重力加速度。从上面的表达来看,如果R gt; RW,不采用援助。另一方面,如果Rle;RW,该警告声音设备将被激活。在本论文的可行性研究中使用了报警声研究。
3.实验研究驾驶模拟器
3.1 实验条件
作为我们分析的第一步,我们将使用驾驶模拟器(图)。实验条件显示:
・行车速度:60km/h
・前方车辆的减速:在干路面(mu;= 0.8),车辆将减6.0m/s2,另一方面,潮湿的路面,将在3.0m/s2减速。在下列不同实验条件下进行。
(1)正常情况:司机总是在开车时不看一边。在这种情况下,所有受试者可以及时刹车以避免追尾碰撞。
(2)在没有警告的情况:司机在驾驶时的子任务。警报声不给司机。在这种情况下,几乎没有司机可以避免后端碰撞。
(3)恒Ttc警告:司机也分驾驶任务。当碰撞时间低于一定的阀值的时候,发出警告声给司机。
(4)警告与拟议的警告距离算法Rw:司机在驾驶时的子任务。
驾驶模拟器
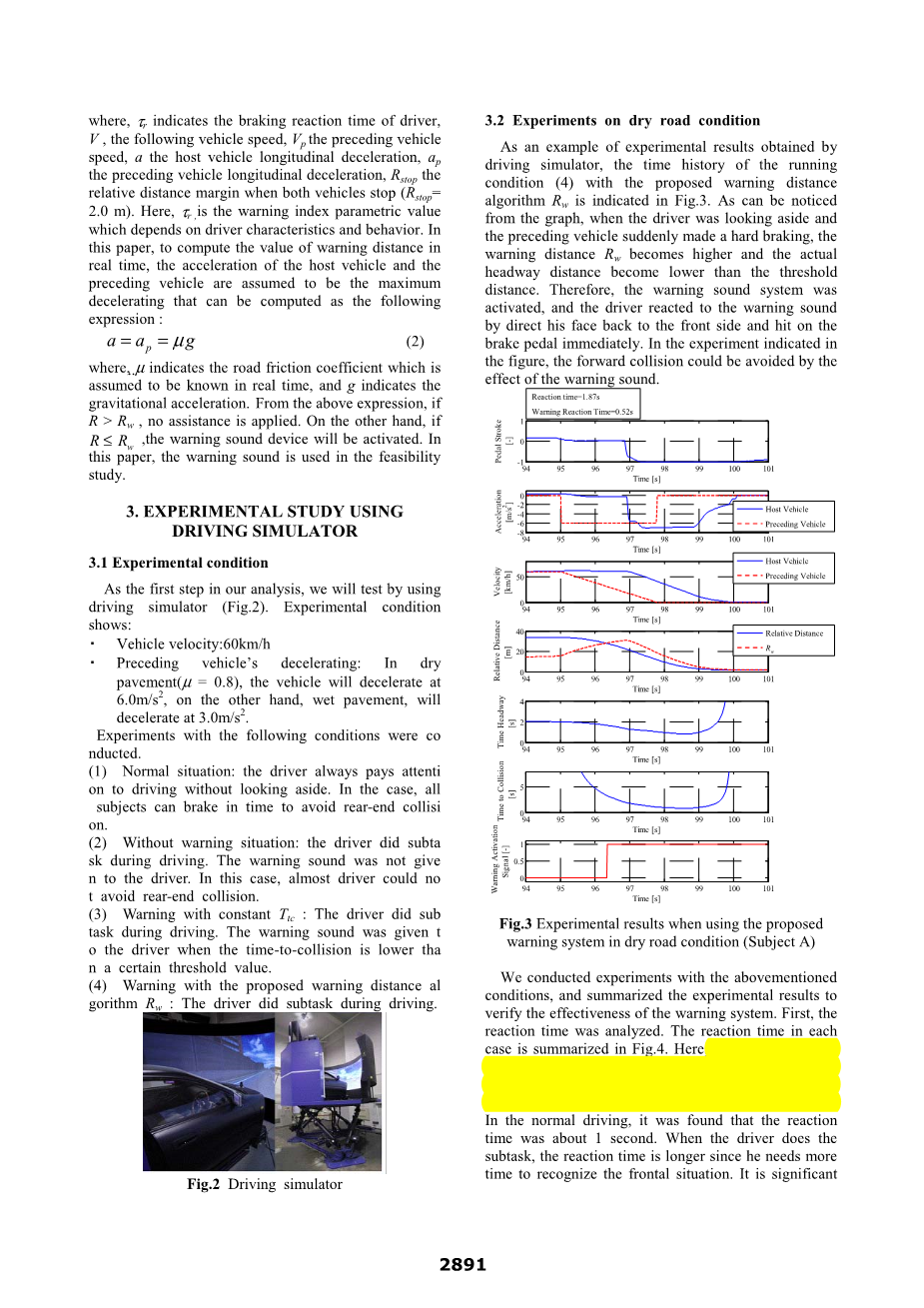
3.2 干燥路面条件试验
作为实验结果的一个例子驾驶模拟器,运行的时间历史条件(4)与所提出的警告距离算法RW是在图3中表示。可以注意到从图中,当司机在一旁看时前面的车辆突然刹车,该预警距离RW变高,实际前进距离变得比阈值低。因此,报警声音响系统激活,并且驾驶员反应的警告声通过直接脸上回到了前侧和击中了立即刹车踏板。在实验中表明在该图中,前部碰撞可以由可避免警告音的效果。
我们与上述进行实验的条件下,并总结了实验结果,以验证警报系统的有效性。首先,将反应时间进行分析。在各反应时间情况下概括在图4中。这里,反应时间被定义为前述车辆开始制动时当驾驶者启动瞬间到击中刹车踏板之间的时间间隔。在正常行驶时,我们发现该反应时间为约1秒。当驾驶员有子任务时,反应时间较长,因为他需要更多的时间来识别前面的情况。很明显,从实验结果可以看出碰撞警告算法可以缩短反应时间。接着,碰撞速度,这意味着速度在追尾事故发生时,进行分析,探讨降低系统的效力冲击能量,如果碰撞是不可避免的。每个案件的碰撞速度如图5所示,通过驱动程序进行分类。在没有子任务的情况下,所有的驾驶员能够避免碰撞。从结果来看,大多数驾驶员能根据系统的警告避免碰撞。这种情况下基于一个固定值的碰撞预警系统碰撞的时间,驾驶员无法避免碰撞,但碰撞速度可能是有效的降低。除了一些司机,在固定碰撞时间情况下,警告时间不适合因为它会延迟,使得碰撞速度不能有效地减少。
3.3 潮湿道路条件试验
如同在干燥条件下的情况下进行试验的一样,在湿滑路面的情况下,分四个实验条件进行的。在这种情况下,向正向撞预警算法中,轮胎与路面摩擦系数变为0.3。因此,相比湿道路条件的情况下所提出的警告算法如图6表示,该系统是在较长的前进距离激活。作为相同的干燥条件的情况下,反应时间和碰撞速度用来分析每个驱动程序以验证警告系统的有效性。在道路潮湿条件下的不同制动反应时间和各类型的碰撞速度分别在图7和8表示。
在潮湿道路条件下,实验结果表明,通过警告系统,对前述车辆制动的反应时间可以有效地降低,与没有警告系统和固定碰撞时间案例相比较。此外,实验过程中可以注意到的是,在一个固定碰撞时间的情况下(在2.7秒的阈值),报警系统激活后,驾驶员能识别前面车辆减速。因此,该警告系统是激活晚了,这是没有用的,不能避免碰撞。因此,关于碰撞速度,虽然碰撞对于某些驾驶员来说无法避免,但是通过预警系统可以显著降低碰撞速度。这显示了所提出的自适应碰撞警告系统性能不仅在正常干燥路面条件下能实现,也能在湿滑路况实现。
-
- 分析预警时间换算成碰撞时间
这里,为了对预警系统的预警时间进行讨论,在预警作用下的碰撞时间在图9中表示出来。我们已发现在干燥路面条件的情况下,警报系统所显示的碰撞时间为3秒,这相当接近于传统的固定TTC警告算法。另一方面,在湿路面的情况下条件下,警报系统所显示的碰撞时间为9秒,是早期潮湿道路状况情况的3倍。这表明提出前方碰撞警告算法是适应道路系数可以改变它的警告时序依赖于轮胎路况。因此,如果车辆配备有另一传感器模块,其以估计或实时测量轮胎与路面系数,这似乎是一个有希望的方法,以提高通过包括警告系统的性能在所提出的警告道路摩擦信息算法。
- 在城市道路的驾驶实验
4.1 驾驶数据收集
在上一节,我们通过驾驶模拟器验证了算法的有效性。然而,司机的反应时间参数为剧烈减速的假设下确定的。因此,使用相同的驱动实验的参数驾驶模拟器可能不适合实际驾驶情况。我们将从正常行驶数据来确定反应时间。在本文中,驱动数据是从试验车辆安装在其上连续传感行驶记录仪获取的(图10)。连续传感行驶记录仪的配置如图11所示。这个行驶记录仪可以在同一时间获取道路信息环境(GPS数据,相对距离),驾驶操作(油门踏板,刹车踏板),车辆数据(速度,横
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[150766],资料为PDF文档或Word文档,PDF文档可免费转换为Word



