无人驾驶前景及可行性分析研究毕业论文
2020-04-08 13:28:25
摘 要
无人驾驶是一门跨专业、跨学科的复合技术,它的核心技术包括环境监测技术、机械自动控制技术,路径识别技术。最近几年以来伴随着科技的发展,无人驾驶技术在不断的提高,无人驾驶技术能够解放操作者双手,通过计算机技术以及传感技术等,使机械变得更加便捷智能,提高工作效率。无人驾驶技术目前广泛应用在飞机,轨道列车,工厂跨单元运输车等领域,近年来无人驾驶汽车的热度不断升高,步入一个高速发展的阶段。按照这样的未来发展方向,无人驾驶汽车最终将成为未来汽车工业的主角。
本文旨在通过收集近年来国内外无人驾驶的技术发展情况,进一步分析无人驾驶汽车的前景以及投入生产的可行性。具体研究方法如下:
1)通过对近年来国内外无人驾驶相关技术进行研究,深入了解无人驾驶环境监测技术和机械自动控制技术,解析无人驾驶汽车的工作原理。
2)对主流关键技术进行逐年分析,深入了解无人驾驶技术的发展方向,重点解析最先进的无人驾驶技术并对无人驾驶的发展前景进行分析。
3)结合今年来各大车企的无人汽车投入和生产情况,以及国家无人汽车相关法规,综合分析无人驾驶汽车生产的可行性。
4)综合全文,合理展望未来无人驾驶汽车的情况。
关键词:无人驾驶,发展历程,发展现况,环境监测技术,机械自动控制技术
Abstract
Driverless is a cross-disciplinary and interdisciplinary composite technology. Its core technologies include environmental monitoring technology, mechanical automatic control technology, and path identification technology. In recent years, with the development of science and technology, unmanned driving technology has been continuously improved. Unmanned driving technology can liberate the operator's hands. Through computer technology and sensing technology, the machine becomes more convenient and intelligent, and improves work efficiency. Unmanned technology is widely used in aircraft, rail trains, factory cross-unit transport vehicles, and other areas. In recent years, the popularity of unmanned vehicles has been rising and it has entered a period of rapid development. In accordance with this future development direction, driverless cars will eventually become the protagonists of the future automotive industry.
This article aims to further analyze the prospects of driverless cars and the feasibility of putting them into production by collecting technical developments of unmanned vehicles at home and abroad in recent years. The specific research method is as follows:
1) Through the research on the unmanned driving related technologies at home and abroad in recent years, we have in-depth understanding of unmanned driving environment monitoring technology and mechanical automatic control technology, and have analyzed the working principle of driverless cars.
2) Analyze the key technologies of the mainstream year by year, in-depth understanding of the development direction of driverless technologies, focus on the analysis of the most advanced driverless technologies, and analyze the development prospects of driverless driving.
3) Combining the input and production of unmanned vehicles of major auto makers this year, as well as the relevant laws and regulations of the country's unmanned vehicles, the feasibility of production of driverless vehicles will be comprehensively analyzed.
4) Integrate the full text and reasonably look forward to the future situation of driverless cars.
Keywords:Driverless cars,developing,situation,environmental monitoring technology,mechanical automatic control technology
目录
摘要 Ⅰ
Abstract Ⅱ
第1章 绪论 1
1.1研究背景及意义 1
1.2无人驾驶汽车发展历史 2
1.3本文主要内容和结构安排 4
1.3.1论文主要内容 4
1.3.2论文结构安排 4
第2章 无人驾驶环境检测技术 5
2.1无人驾驶环境检测传感器 5
2.1.1摄像头 5
2.1.2激光雷达 6
2.1.3 GPS系统 6
2.2无人驾驶道路边缘及道路标线检测 6
2.2.1道路边缘和道路标线检测方法 7
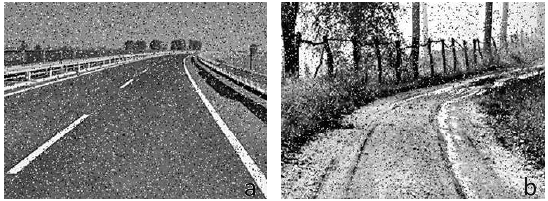
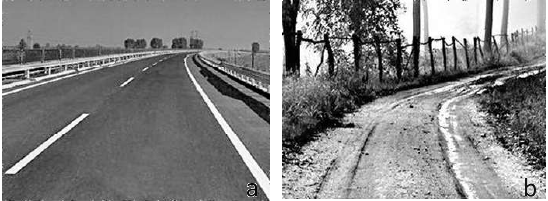
2.2.2基于色彩空间变换的图形预处理方法 7
2.2.3道路边缘和道路标线识别算法 8
2.3前方车辆及障碍物识别技术 10
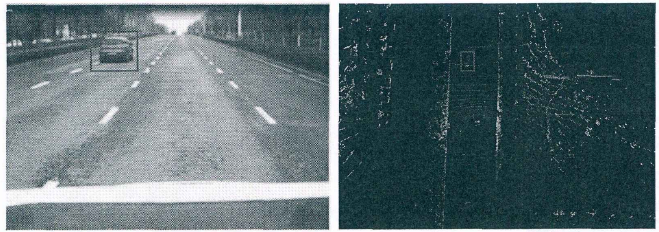
2.3.1基于视觉传感器的前方车辆识别方法 10
2.3.2基于激光雷达三维传感系统的障碍物检测 11
2.3.3基于多传感器信息融合的前方车辆识别算法 11
2.4本章小结 12
第三章 无人驾驶机械自控技术 13
3.1无人驾驶运动学模型 13
3.2无人驾驶运动规划设计准则 14
3.3 基本RRT算法 15
3.4 RRT算法发展历程 17
3.5基于引导域的参数化RRT算法 17
3.5.1基本A*算法 17
3.5.2 基于A*算法的引导域建立 18
3.5.3引导域与RRT算法结合方法 19
3.6无人驾驶控制平台 19
3.6.1“智能先锋”控制平台构架 20
3.7 本章小结 22
第4章 无人驾驶的可行性 23
4.1国外无人驾驶现况 23
4.2 国内无人驾驶发展情况 25
4.3 各国对无人驾驶的法规限制 25
4.4 无人驾驶当前存在的问题及技术研发方向 26
4.5 本章小结 27
第5章 总结 28
5.1 结论 28
5.2 展望 28
参考文献 29
致谢 31
第1章 绪论
1.1研究背景及意义
汽车文明是一项划时代的文明,汽车的出现让人们的生活便利性得到了很大的发展,不仅如此,汽车工业的进步也拉动了社会整体的进步。然而,汽车工业的进步也带来了一系列的问题,汽车工业需要一个新的突破点。传统汽车在当今的泛用性越来越高,但是需要耗费人力并且不利于系统化的管理。当今计算机技术和物联网的发展带动了一系列的产业,汽车工业也顺应潮流进行改造,各大车厂纷纷投资进军无人驾驶汽车的产业。对于无人驾驶汽车这一新兴汽车发展方向,不仅仅在民间受到了巨大的关注,各个国家的军队也对其产生了巨大的兴趣,各行各业都开始进军无人驾驶汽车产业,无人驾驶汽车已经是时代的新宠。
无人驾驶汽车的本质是自动机器人,通过车轮进行移动的非完整约束系统,其任务在于给定起止地点,通过搭载的视觉系统和运动规划系统,完成一系列拟人化的汽车驾驶作业,无人驾驶汽车的出现可能会颠覆当前的汽车工业结构。(冯来春.2017)。无人驾驶车辆技术能够改变现有的交通系统,并产生一些改变如1)有效提高行车安全2)为老年人和残疾人士提供行车便利3)增加城市道路容量,缓解拥堵4)节省劳力,减轻驾驶员负担。
无人驾驶车辆的研究起源于1950年代,时日至今,无人驾驶车辆技术一直在向前稳步推进,但并未受到非常广泛的研究。就在最近几年,无人驾驶技术产生了一定的成果,也受到了更多的关注,研究力度大幅上升。无人驾驶技术的关键在于环境监测和机械自动控制系统。其中环境监测系统包括动态障碍物检测跟踪、动态障碍物识别和动态车辆轨迹预测(黄如林,2017)。机械自动控制系统是无人驾驶汽车的核心控制部分,该部分主要是通过由各种途径得到的外界信息,以及环境中的障碍物分布,根据已经录入的算法等规划出一条能够安全到达目的地,同时又能够满足车辆形式条件的路径。
综上所述,无人驾驶汽车技术对于汽车工业来说具有革命性的意义,同时也是一块非常具有挑战性的课题。通过对无人驾驶技术是研究历史和研究现况进行分析,从而对无人驾驶技术的未来发展前景进行展望,具有非常重要的研究意义。
1.2无人驾驶汽车发展历史
无人驾驶概念出现的较早,人们对于未来科技的展望于1920年就提出了一种可以自主行驶的汽车概念,那时汽车工业也处于起步阶段,对于无人驾驶的研究还没有起色。
在1950年代,美国最先开始了无人驾驶汽车的研究,世界上的第一台能够自主导航的车辆是由贝瑞特电子公司研制出来的,该车辆是无人驾驶汽车的基石,虽然仅仅只是在设定的轨道中行驶,但这为无人驾驶汽车的发展提供了希望。1980年年左右,卡内基梅隆大学研制成功了世界上第一台定义上的无人驾驶汽车,其名为Navlab-1,然而当时的计算机技术还没有很好的发展,硬件和软件水平都不足以支持高速行驶,无人驾驶的研究一度陷入瓶颈(Thorpe C等,1988).1990-2000年间,卡内基梅隆大学的研究员们以Navlab-1为基础继续进行研究,之后便有了Navlab系列无人驾驶汽车,其中Navlab-5实现了适应复杂路况的长距离行驶,并通过了上万里的告诉行驶性能试验。在这之后,为了达成加速无人驾驶汽车相关技术的发展,并且研究无人驾驶车辆技术是否可行的目的,美国国防部高级研究局DARPA(国防高级研究计划局)在2004年,2005年,2007年间共举办了三届无人驾驶车辆比赛,三届无人车比赛的冠军代表着当时无人车最先进的技术,这三届赛事举办的十分成功,无人驾驶受到了各方面的关注,对无人驾驶技术的研发投入也逐渐增大。
在这之后谷歌公司招募了大量的无人汽车方面的人才并在2010年开始了无人驾驶汽车的研究,凭借着强大的科研团队和在高精密地图上的优势,谷歌制造了最能接近实际使用的无人车,但由于车辆控制系统太过保守,十分容易引起追尾事故。
同时,通用,特斯拉等车企甚至苹果这类信息行业的著名企业也对无人驾驶展现了浓厚的兴趣。不同于谷歌的快速发展模式,这些公司采用从辅助驾驶到半自动驾驶到无人驾驶这样循序渐进的发展方式。特斯拉是全球第一个将无人驾驶汽车进行量产的公司,但就实际使用情况来看,事故发生率依然较高。
我国的无人驾驶起步较晚,在1991年到2005年,无人驾驶技术的研究主要通过与高校联合开发的形式进行。在2009年至2016年,国家自然科学基金委员每年都会开展一次智能车未来挑战赛,比赛在城市环境下进行无人车的驾驶性能测试,测试了无人驾驶车辆在通常环境下的适应情况0.2014到2016年间,中国陆军出资组织了两次“跨越险阻”地面无人车挑战赛,以此来了解我国无人驾驶的发展现状。在多方支持之下,我国的无人车技术也得到了飞速发展。图1.1为部分无人车原型车图片。



图1.1 无人车原型车图片
图中按照从左到右,从上到下的顺序排列,分别为谷歌无人车、Uber无人车、百度无人车、斯坦福无人车、麻省理工无人车、牛津大学无人车、德国柏林自由大学无人车、军事交通学院无人车、福特第二代Fusion无人驾驶汽车、特斯拉无人驾驶车、广汽集团新能源无人驾驶汽车。
1.3本文主要内容和结构安排
1.3.1论文主要内容
为了证明无人驾驶技术的发展前景和可行性,本文基于无人驾驶技术的发展历史及发展现状深入研究无人驾驶技术。
首先,从无人驾驶的起源开始,对无人驾驶相关的技术应用的领域进行介绍,延伸到无人驾驶汽车领域。
之后,对无人驾驶汽车的技术进行介绍。分为无人驾驶汽车的环境监测技术和无人驾驶的机械自控技术。无人驾驶汽车的环境监测技术主要从传感器的角度进行分类介绍,通过传感器的不同,介绍主流发展法相,之后介绍环境监测技术的决策系统和执行系统,对无人汽车的基本运作技术进行介绍。
再之后对无人驾驶机械自动控制技术进行介绍,即无人汽车的算法部分。首先对现阶段主流的无人汽车运动模型进行介绍,然后根据算法分类的不同,介绍各种算法的优势和劣势,分析当前算法发面存在的问题和不足,指出未来算法的发展方向。
最后对全文进行总结,综合各国已有的应用现状和相关法规等要素,展望未来无人驾驶汽车可能用到的新技术,对无人驾驶汽车的发展进行一定的预测。
1.3.2论文结构安排
第一章绪论中,对研究背景和意义,无人驾驶汽车的历史和现状,无人汽车相关技术的定义以及本文的研究内容进行介绍。
第二章介绍无人驾驶环境监测技术,首先介绍环境感知系统,再对目前的环境监测方法进行介绍。然后对当前环境检测技术提出建议和发展发向。
第三章介绍无人驾驶机械自控技术,首先介绍无人车的基本建模,然后对无人车上的主流算法进行介绍。最后根据资料提出发展建议。
第四章介绍无人驾驶的现状,包括无人驾驶的各种应用和各国无人驾驶的发展情况,以及目前国内针对无人驾驶的法规对无人驾驶的影响。
第五章进行总结,对无人车的可行性进行分析,展望未来的无人车发展情况。
第2章 无人驾驶环境检测技术
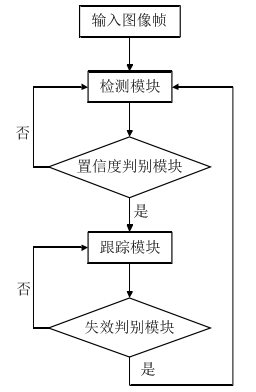
无人驾驶环境检测技术包括道路边缘和道路标识检测,障碍物动态追踪,障碍物动态识别。
障碍物动态追踪是无人驾驶汽车在现实交通环境中行驶的基本要求,现阶段的无人驾驶汽车可以通过使用不同的传感器检测并跟踪运动的目标,主要使用的传感器有相机、毫米波雷达和激光雷达。
障碍物动态识别需要面对障碍物姿势变化、物体遮挡、光线影响及尺寸变化等要素带来的问题,在无人驾驶汽车技术的发展历史中,世界各地的研究者们曾经提出了很多动态障碍物识别方法,识别方法主要通过传感器的不同来区分,比较先进的方法主要有基于图像的方法和基于激光雷达的方法。
无人汽车的环境监测技术直接影响到无人汽车能否投入到实际应用中,当前的环境监测技术还不能完全满足使用需要。
2.1无人驾驶环境检测传感器
本节将介绍无人驾驶汽车的环境感知技术使用的各种传感器。
传感器是无人驾驶汽车的重要组成部分,无人驾驶汽车通过传感器来感知外界环境,常用的传感器包括摄像头、激光雷达、GPS等。下面将分节对传感器进行讲解。
2.1.1摄像头
摄像头是最一般的视觉传感器,摄像头的功能和人眼类似,基本用于图像的获取。当前市场上的摄像头存在两种,通过信号传递的形式不同分为两种,分别为数字式和模拟式。数字式摄像头在获取图像之后,可以将图像使用的模拟信号转换为数字信号,可以直接进行后续处理加工。而模拟摄像头在获取的图像格式为模拟信号。这种信号是不能直接被计算机使用的。必须先转换成数字模式,而且想要在计算机上使用还要经过压缩。由于以上的原因,模拟摄像头的转换速率要远远低于数字摄像头,故而在目前无人车中大多是使用数字摄像头。
无人车的摄像头选择已经较为成熟,在无人车中的摄像头,主要用途是车道线检测、车辆检测和交通标识识别。

图2.1 罗技C525摄像头
2.1.2激光雷达
激光雷达是一种高精度的雷达系统,通过激光的速度极大提高时效性。其工作原理是将检测信号(激光束)发送到目标,然后将目标(目标回波)反射的接收信号(目标回波)与发射信号进行比较。经过适当处理后,可以获得目标的相关信息,如目标距离,方位角,高度,速度,姿态,甚至形状参数来检测,跟踪和识别障碍物。它由发射器,接收器以及信息处理系统组成。发射器发射激光探测目标区域。接收器然后将从目标反射的光脉冲恢复成电脉冲并将它们发送到监视器。激光雷达的优点有分辨率高,指向性好,抗干扰能力强等等。激光雷达的种类通过搜索范围来分类,分为单线,多线和三维激光雷达,现在最常用的是三维激光雷达。激光雷达主要用于障碍物的精确识别和车道检测线的辅助识别。
2.1.3 GPS系统
通过事先准备的信号卫星,在全球实现实时定位、导航的系统就是GPS系统,即全球卫星定位系统。GPS是由美国国防部开发的一种全段,全球,全天,并且精度极高的卫星导航系统。通过GPS系统,全球用户可以获得高精度的导航信息,而且成本较为低廉。GPS在获取定位,定时,定速信息上有极好的应用体验。在无人汽车中,GPS与高精密地图技术结合能准确的确认当前车辆所处的位置。
GPS应用最强的是谷歌智能车,使用的高精密地图和传感器结合的障碍物识别方法。但是在国内,GPS的应用较少。
2.2无人驾驶道路边缘及道路标线检测
本节主要介绍基于摄像头和雷达获取图形之后的无人驾驶汽车道路边缘及道路标线的检测技术。
2.2.1道路边缘和道路标线检测方法
道路边缘和道路标线的监测,目前比较主流的方法有以下几种:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: