AEB系统测试及评价方法毕业论文
2020-04-11 17:48:57
摘 要
AEB作为ADAS系统的一部分,成为了近年的研发热门。而在AEB的开发过程与实车应用过程中,每个环节都离不开测试验证与评价。如何进行相关的测试,也相应地成为了一个新的研究方向。
本文专注于对商用车AEB系统测试方法的研究。首先,分析了从模型在环(MIL)测试到硬件在环(HIL)测试到实车测试的测试流程;其次,归纳了测试所用的测试工况;运用所提出的测试工况,进行了基于TruckSim与Simulink联合仿真的AEB系统MIL测试以及基于dSPACE与PanoSim的AEB系统HIL测试台架的研究;最后,根据测试结果,提出了对未来有关AEB测试方法方向研究的展望。
研究成果表明:本文所设计的AEB系统测试工况源于真实的交通数据的分析,可以为未来有关测试的场景选取提供参考;本文研究的MIL测试方法能够完成对商用车与各种测试场景的建模,完成了对AEB系统的验证与分析;HIL测试台架实现了AEB执行机构的在环,能够完成比例继动阀工作特性的分析,工作机理的验证;能够更准确地反应实车制动过程,实现驾驶员在环;能够代替一部分的实车测试,起到缩短开发周期的作用。
关键词:AEB;模型在环;硬件在环;dSPACE
Abstract
With the rapid development of the automobile industry, people’s desire for a safe traffic becomes stronger and stronger. In order to fulfil such a requirement, the world’s major automotive companies are rushing to research and develop ADAS. As a part of ADAS, AEB has become a research hotspot in recent years. Also, how to carry out relevant tests has become a new research direction.
This paper is focused on researching AEB testing of commercial vehicles. Firstly, I analyzed the test flow from Model-In-the-Loop(MIL) simulation and Hardware-In-the-Loop(HIL) testing to test track and public road testing. Secondly, I proposed a set of AEB test scenarios. Using the proposed test scenarios, the Model-In-the-Loop simulation based on TrcukSim and Simulink joint simulation testing and the Hardware-In-the-Loop testing based on dSPACE and PanoSim were studied. Finally, according to the results of tests, I analyzed the practical meanings of the studied testing system and proposed my prospects for the direction of future AEB test methods.
The results of this paper showed that AEB test scenarios designed in this paper orginated from analysis of real traffic data, which can provide reference for the future researchers. The method of Model-In-the-Loop simulation using TrcukSimm can complete the modeling of commercial vehicles and modeling of different test scenarios, which can be used to do validation analysis of AEB system during the development process. The Hardware-In-the-Loop testing realized the in-loop of the AEB actuator, so it can analyze the working characteristics of proportional relay valve and verify the working mechanism. HIL testing can more accurately reflect the actual vehicle braking process and enable driver-in-the-loop. It can replace parts of the actual vehicle testing and shorten the development cycle.
Key words: AEB;MIL;HIL;dSPACE
目 录
第1章 绪论 1
1.1 研究背景及意义 1
1.2 国内外研究现状 2
1.3 研究内容及论文组织结构 5
第2章 商用车AEB系统测试场景分析 7
2.1前后车碰撞测试场景 7
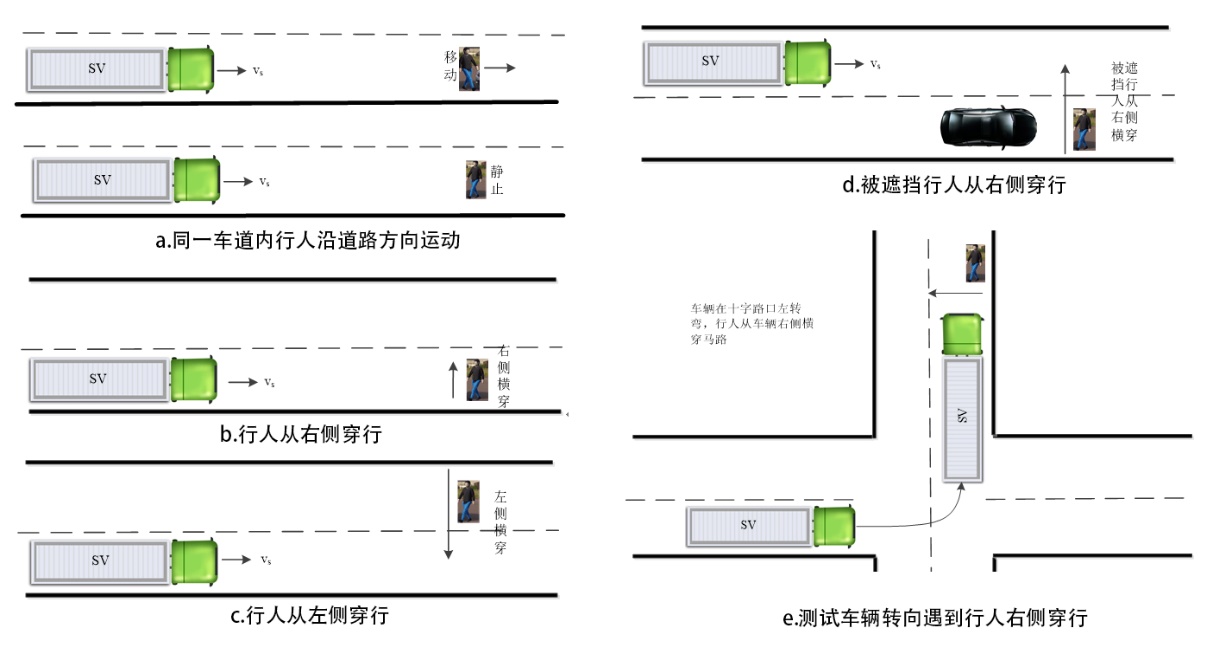
2.2 行人碰撞测试场景 8
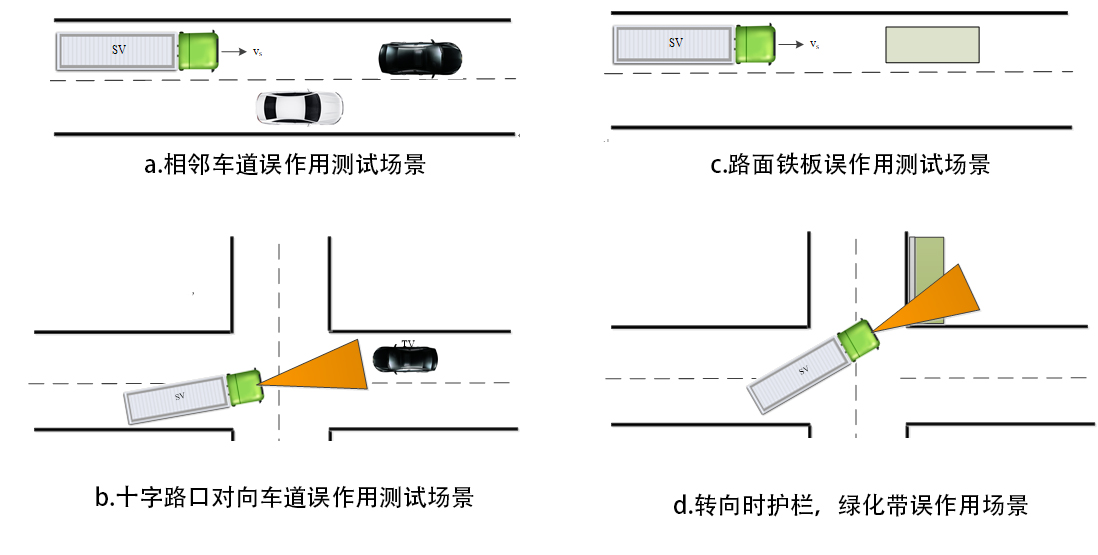
2.3 误作用测试场景 9
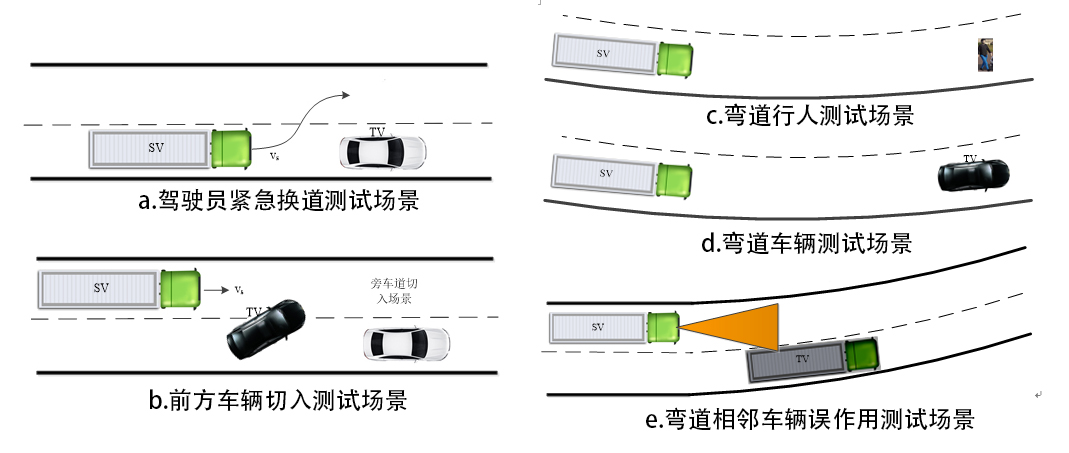
2.4 其余功能测试场景 11
第3章 AEB模型在环仿真测试 13
3.1 基于TruckSim的仿真场景设置 13
3.1.1仿真软件功能介绍 13
3.1.2 测试场景设置 13
3.2 AEB控制算法Simulink建模 15
3.2.1 车辆模型信号的获取 15
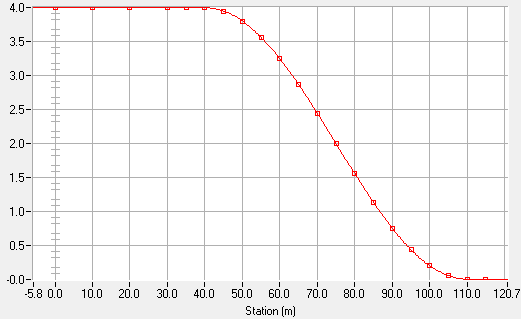
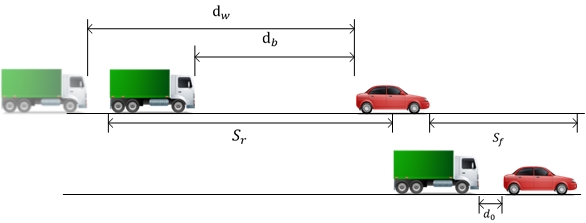
3.2.2 基于紧急制动过程的安全距离模型 15
3.2.3 Simulink控制模型 17
3.3 模型在环测试结果分析 19
第4章 AEB硬件在环台架测试 25
4.1 硬件在环台架的搭建 25
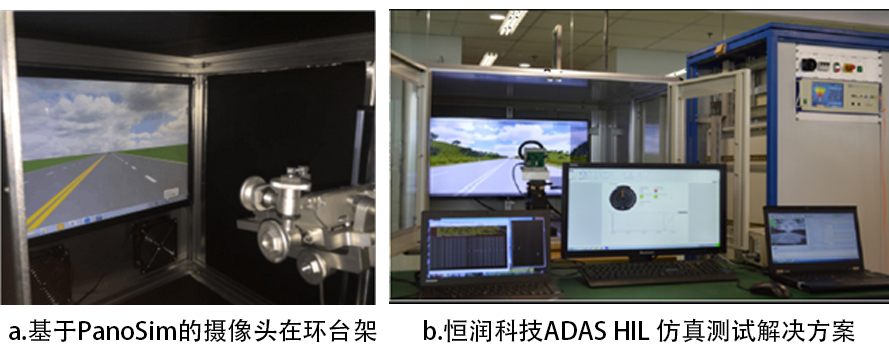
4.2 PanoSim RT实时仿真 29
4.2.1 PanoSim测试场景的建模 29
4.2.2 Simulink实时程序的编译 30
4.3 硬件在环测试结果分析 32
第5章 总结与展望 36
5.1 全文总结 36
5.2 未来工作展望 37
参考文献 39
致 谢 42
第1章 绪论
1.1 研究背景及意义
汽车产业的飞速发展给人们带来了很大生活便利,但不断发生的道路交通事故却时刻威胁着人们的生命财产安全。据统计,全球每年因为车辆碰撞事故丧生的人数已经超过了130万人[1]。
为了解决道路安全问题,相关研究机构与车企都加紧了对现代汽车安全保障系统的研究推广工作。不同于二十年前大量由于车辆本身问题造成事故的情况,如今的道路事故多数是由于驾驶员的不当操作造成的。所以,目前汽车安全技术的研发重点旨在规避造成交通事故的不可控因素:驾驶员因素,这就是汽车的主动安全技术。
属于主动安全技术的主要有稳定性控制类的制动防抱死系统(ABS),牵引力控制系统(TCS)等;侧向控制类的车道偏离预警(LDW),车道保持辅助系统(LKA)等以及纵向控制类的自适应巡航系统(ACC),自动紧急制动系统(AEB)等。其中,AEB系统被认为是在面对实际行驶过程中的车辆碰撞危险时最有效的安全技术之一[2]。
AEB系统主要包含前方碰撞预警、紧急制动辅助、自主紧急制动的功能;通过在车辆上加装的传感设备或者V2X通信设备,实时获取当前车辆和环境信息;进行决策算法的分析,分析潜在的碰撞危险;制定相应的预警辅助或主动干预策略,实施警告或者自主制动措施,能有效地避免碰撞事故的发生。Jermakia[3]等人的研究表明,警方报道的前后车辆碰撞事故中的70%都能够通过前方碰撞预警系统进行避免或者减少损失,其中包括导致驾驶员死亡的事故中的48%;Euro-NCAP和ANCAP的研究报告则显示:安装AEB系统的车辆,在车速小于50 km/h 时,可减少38% 的意外追尾事故[4]。
目前世界上主流的汽车厂商都有自己的汽车AEB系统,如奔驰的Pre-Safe安全系统,沃尔沃的City Safety系统等。我国起步较晚,但各大高校和研究机构也在近年加紧了开发AEB系统的步伐。
根据汽车电控系统开发常常采用的V型开发模式[5],如图1.1所示,测试与评价贯穿于整个开发流程,所以如何进行相关的测试也是开发过程中需要研究的内容。其中包括有模型在环测试和硬件在环测试,实车道路测试等。
模型在环(MIL)测试采用计算机软件搭建控制系统与被控对象的模型,即AEB控制算法与车辆动力学模型,形成闭环进行虚拟仿真。利用MIL测试,可以迅速发现在AEB控制系统设计阶段产生的错误,并对AEB系统的性能进行评估和改进。MIL测试具有快速低成本的特点;但是也存在有无法完全精准模拟,无法完成对硬件的测试等缺点。
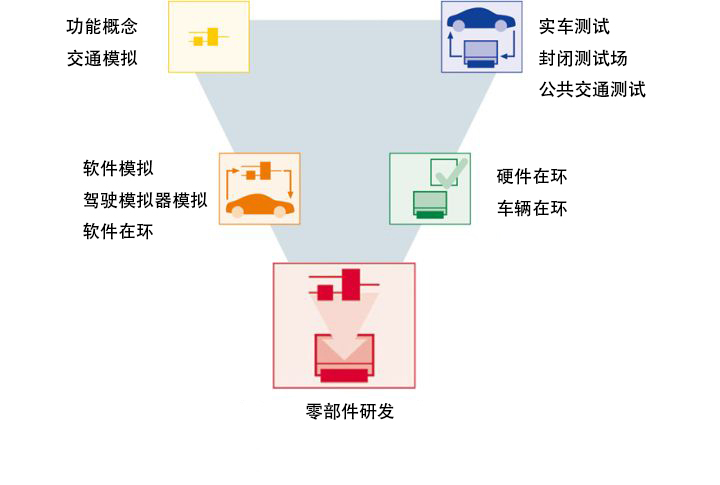
图1.1 V型开发模式
硬件在环测试(HIL)是在控制器开发完成后进行的验证测试。HIL测试为控制系统硬件搭建一个虚拟的运行环境,即虚拟的AEB系统工作工况,使得真实的AEB系统在虚拟环境中运行。较MIL测试而言,HIL测试加强了AEB系统测试的精确程度,完成了对硬件的直接测试;又比实车测试周期短,成本低,并且实现了测试场景可控,可以用于分析控制算法的有效性和硬件工作的特性与机理。
实车测试是最为直接与准确的测试。目前进行实车测试的方法主要是按照相关法规规定的测试工况,进行道路测试。目前已有多国将AEB系统测试纳入新车评价规程之中,如Euro-NCAP(欧洲新车评鉴协会)[6]中规定的AEB系统测试方法,则是最早的也是最具代表性的AEB系统实车测试评价方法。
在进行MIL测试,HIL测试,实车测试时,选择合适的测试工况是前提条件之一。目前主要遵循的实验配置是参照Euro-NCAP规程中的前后车碰撞工况进行设置的。但是各国道路交通实际情况和驾驶员驾驶习惯是不同的,适用于各国的AEB系统测试评价方法应当分别进行设计,并且根据不同的设计着重点,不同机构提出的测试评价方法也有所区别,故有必要对AEB系统测试评价方法的制定方法进行研究[7],并遵循中国的实际交通道路情况以及AEB系统所应用车辆的实际需求,开发适合于特定AEB系统的测试评价方法。
1.2 国内外研究现状
目前国内外对于AEB系统的测试场景的研究都已经取得了一定的成果。
欧洲的Euro-NCAP中关于AEB系统的前后车碰撞以及与道路弱势群体碰撞的测试场景是AEB测试场景的典型代表,其中定义了3种典型的前后车测试场景,6种行人测试场景和3种自行车测试场景,是AEB系统测试方法研究的重要参考依据[6][9];韩国Taewoo和Kim提出了评价AEB系统在自行车碰撞工况中的安全性能的评估方案,通过分析实际车辆与骑行者的碰撞数据并对真实交通碰撞情景进行分类,选取典型工况,提出了适用于韩国道路交通情况的车与自行车碰撞的测试场景 [10];Op den Camp Olaf等人选取了法国,德国,意大利,新西兰,瑞典,英国的真实交通数据,总结了五类车辆与骑行者之间的最常见的碰撞事故场景,选取其中三种定制了测试方案,并进行了仿真模拟和实车验证测试,证明了Euro-NCAP中所拟定的有关道路弱势使用者的AEB测试方案的可行性[11];Christian-Nils Boda根据对驾驶员特性的研究,提出了在进行AEB系统测试时应当将驾驶员的适应程度加入到测试工况的考虑范围之中,提出了对Euro-NCAP测试实验工况的改进建议[12]。
在国内,同济大学的李霖,朱西产,江丽君等人参考国际上已有的研究成果,利用行车记录仪在上海地区采集真实交通情况的数据和视频资料以及中国大型实车路试(China-FOT)的数据,采用聚类分析的方法研究出适合于上海地区的4类与行人有关的AEB测试场景,4类前后车之间的碰撞测试场景,4类切入型危险工况以及7类涉及骑车人的测试场景[13][14][15][16];清华大学汽车安全与节能国家重点实验室的李升波,王文军等人根据发展中国家汽车与自行车碰撞事故较多的特点,利用北京城区的50辆出租车真实行驶数据和中国交通事故深入研究(CIDAS)数据库的数据,总结了中国发生频率最高的3种车辆与骑车人碰撞工况[17];中国汽车技术研究中心的石娟等人同样利用CIDAS数据库中的数据,选取车辆运动信息,行人运动信息,行人特征等参数进行分析,建立了3种适合于中国国情的行人工况AEB测试场景,为中国新车评价规程(C-NCAP)中的场景设计提供帮助[18];孙勇等人在分析了各国法规中AEB系统的测试场景之后,提出Euro-NCAP所定义的测试标准最为严格具体,可以为中国相关法规制定提供参考[7];中国汽车技术研究中心也终于在2018年推出的C-NCAP中加入了对AEB系统的评价方法,包括了前后车碰撞工况和行人工况两部分,对国内AEB系统测试工况的研究提供了参考[19]。
在AEB的测试方法方面,国内外也有很多的研究者们进行了一些创新。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: