国内外全地形车辆的市场分析及发展趋势研究开题报告
2020-04-13 11:45:58
1. 研究目的与意义(文献综述)
1.
-
目的及意义(含国内外的研究现状分析)
剩余内容已隐藏,您需要先支付后才能查看该篇文章全部内容!
2. 研究的基本内容与方案
基本内容及技术方案
剩余内容已隐藏,您需要先支付后才能查看该篇文章全部内容!
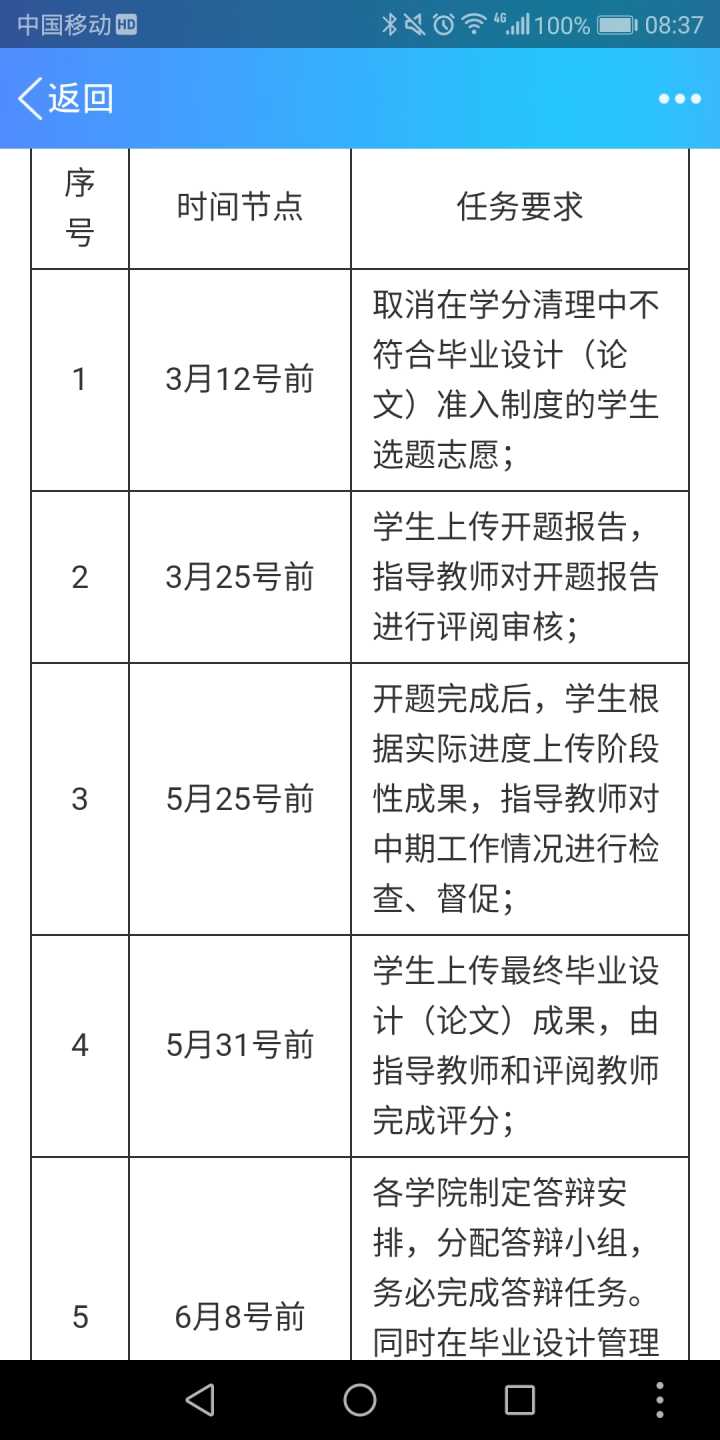
3. 研究计划与安排
4. 参考文献(12篇以上)
luca bascetta,davide a. cucci ,matteo matteucci. kinematic trajectory tracking controllerfor an all-terrain ackermann steering vehicle.2016
[2] 谢晓林,高峰,黄川,曾文. design and development of anew transformable wheel used in amphibious all-terrain vehicles (a-atv)[j].journal of terramechanics,2017
[3] 王猛.全地形车电动助力转向系统控制器的研究[d].东北林业大学,2016.04
剩余内容已隐藏,您需要先支付 10元 才能查看该篇文章全部内容!立即支付



