GPS坐标时间序列周期性信号探测方法研究毕业论文
2020-06-20 19:02:49
摘 要
在当今定位导航飞速发展的时代,世界各国地球物理研究如火如荼。各个国家都建立了GPS的连续跟踪站,本篇论文利用IGS连续跟踪站的观测数据进行研究。
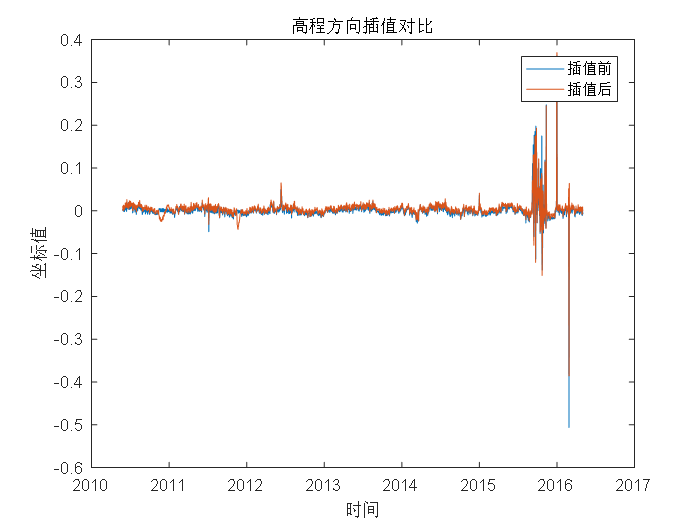
本篇论文前半部分介绍时间序列的平稳性及验证方法,时间序列分析所采用的模型类别。对时间序列进行插值,从而取得分布均匀的时间序列。
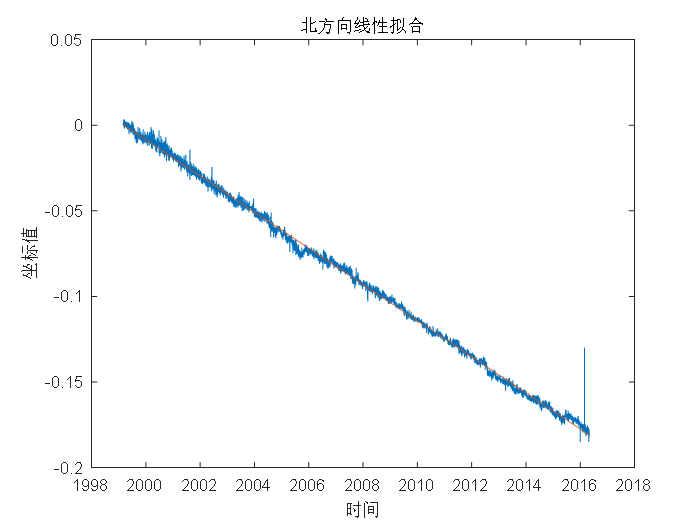
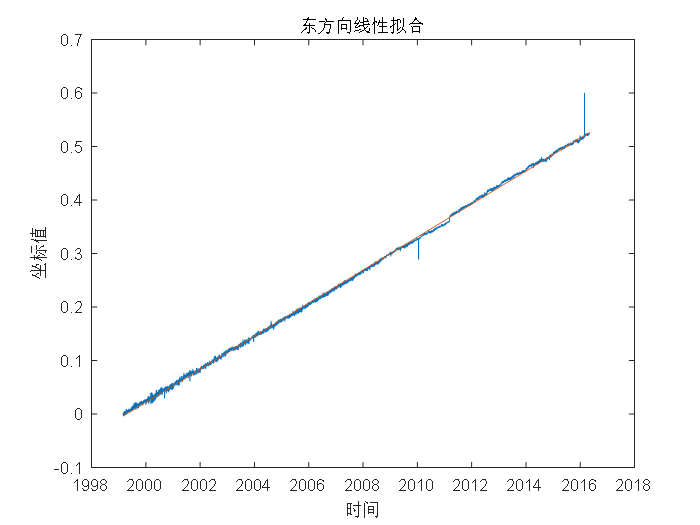
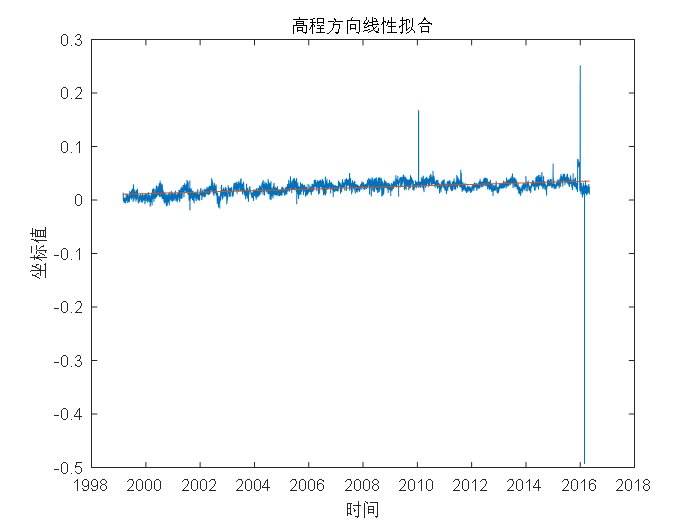
后半部分分析了GPS坐标时间序列的特点和频谱特点。结合MATLAB编程实现N/E/U三个方向的实测数据,计算各方向的周期、振幅等参数,绘制频谱图及相位图并进行特点分析,并且用两种方法剔除趋势项和周期项,对时间序列的预测和实测数据进行对比,采用快速傅立叶变换、线性拟合及功率谱估计等方法对序列频谱信息进行分析。
关键词:时间序列 MATLAB 频谱特性FFT 功率谱估计平稳
Abstract
In today's rapid development of positioning navigation era, the world's geophysical research are in full swing. Each country has established a GPS continuous tracking station, this paper using IGS continuous tracking station observation data to study.
The first half of this paper introduces the smoothness of time series and the method of verification and the model categories used in time series analysis. Interpolate the time series, so as to obtain a uniform time series.
The latter part analyzes the characteristics and spectral characteristics of GPS coordinate time series. Combined with MATLAB programming to achieve N / E / U three directions of the measured data to calculate the direction of the cycle, amplitude and other parameters, drawing spectrum and phase diagram and characteristics of the analysis, and two methods to remove the trend and cycle items, Time series prediction and measured data are compared. Fast Fourier transform, linear fitting, wavelet transform and least squares estimation are used to analyze the sequence spectrum information.
Key words:time series MATLABfrequencyspectrumFFTPower spectrum estimation stable
目录
摘要 I
Abstract II
第一章引言 1
1.1 研究背景 1
1.2 研究现状 1
1.3 研究方法 2
1.3.1 研究思路 2
1.3.2 研究方法 2
第二章数据预处理及预测模型 4
2.1 时间序列概念 4
2.2 数值填补 4
2.3线性分析 7
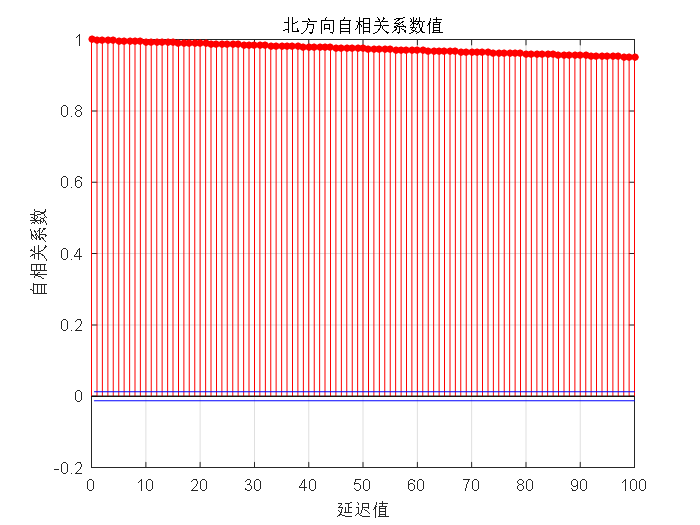
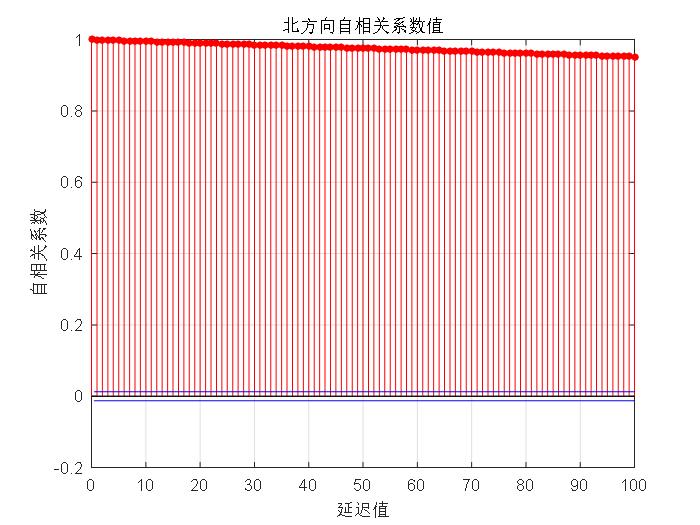
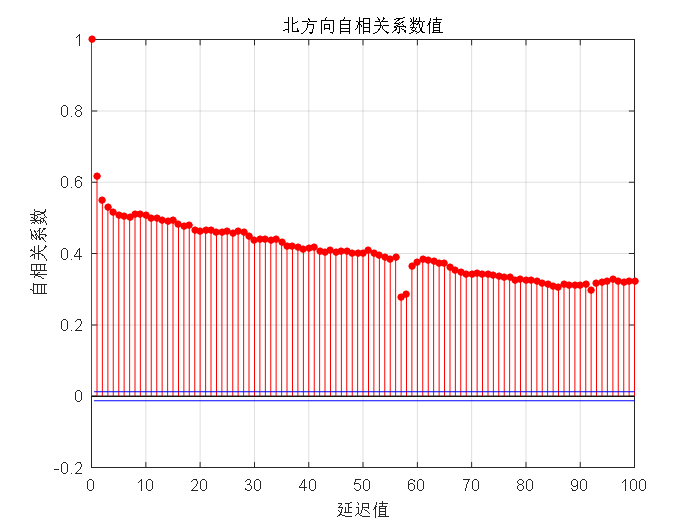
2.4 相关函数分析 8
2.4.1 自相关函数分析 8
2.4.2 偏自相关函数分析 10
2.5 一阶差分 11
2.6 平顺性检验 14
2.7 AR模型估计与预测 15
2.7.1 平稳时间序列的建模 15
2.7.2 非平顺时间序列的建模 15
2.7.3 模型的定阶问题 16
2.7.4 信号预测 16
第三章频谱分析和噪声判断 18
3.1 分析方法 18
3.1.1 FFT(快速傅立叶变换) 18
3.1.2 AR模型的功率谱估计 20
3.2 噪声类型的判断 22
3.2.1 AR功率谱对噪声的估计 22
3.2.2 功率谱指数对噪声类型的判断 23
3.3 本章小结 24
第四章结论与展望 25
4.1 总结 25
4.2 展望 25
参考文献 26
附录 28
5.1程序的流程图 28
5.2数据预处理部分 28
5.3平稳检验部分 29
5.4FFT计算部分 29
5.5ACF/PACF部分 30
5.6功率谱部分 30
5.7信号预测部分 31
致谢 32
第一章引言
1.1研究背景
因为GPS对地观测技术以及空对地激光测距、摄影测量和微波遥感等其他对地观测技术对比起来具有观测简易、成本低、精度较高等诸多优点,所以现如今主要的空间对地观测技术都主要采用GPS技术。从1991年8月奥地利维也纳的国际大地测量与地球物理联合会(International Union of Geodesy and Geophysics,IUGG)会议以来,就关于在全球建立Geodynamic Project GPS服务提出了想法,开始将GPS应用于Geodynamic Project。截至目前,GPS对地观测技术已经在地球物理领域使用了20多年了。上世纪末成立的IGS在全球布设了GPS连续观测网。IGS服务投入运营后,GPS数据在数据的处理精度以及可靠性的水平上都有着明显的进步,GPS也越来越多的延伸到天文动力学。至今IGS站已经获取了20多年的数据,这也促使GPS成为观测地球外层变化的主要手段。可是对于U方向来说,由于GPS坐标的时间序列随机噪声对U方向的影响比水平方向(N/E方向)大得多,也体现在周期特性更显著之上,影响垂直位移的因素太多而且通常不可预计。所以GPS在垂直方向的应用受到限制。
通过近几年的研究显示,对于高程方向,GPS的观测精度已经有了明显的改善,可以利用IGS站日解算的实测数据进行多方面的探索。然而离散的GPS时间序列受到季节性和趋向的影响,所以要求研究者对时间序列的周期项进行探索。对时间序列的周期特征进行研究有两个用处:
1.可以了解地球各种物理现象(比如潮汐)和地壳的周期性变化;
2.可以修正各种误差模型,减小误差项,提高GPS计算精度。
1.2研究现状
1927年,理学家Yule提出利用AR自回归模型来判断以后经济发展的趋势;1931年,在AR自回归模型的基础上,人们奠定了MA移动平均模型,也从而夯实了时间序列分析的基础;20世纪中后期,大地测量学家们开始在GPS的数据处理过程当中加入了时间序列的分析方法,这使得GPS时间序列分析在数据处理中体现出高效和精度高的作用。
目前,时间序列的分析方法有:KALMAN滤波分析法、GM和ARMA预测法、ACF自相关函数法、回归分析法、功率谱分析和小波变换等。回归分析是处理数据之间关系最基本的数学方法,该方法为GPS和周围环境的联系及受到的影响提供了一个数学模型。回归分析方法分为一阶线性以及多阶线性,杨强等利用了线性回归的研究方法,用来解析观测站的线性速率,并且得到了部分观测站的速度场。
相关图片展示:
您可能感兴趣的文章
- 南京市地上电力线、通信线调查与入库开题报告
- 徕卡TM30测量机器人ATR性能分析开题报告
- 倾斜摄影测量技术在道路规划中的应用研究外文翻译资料
- 基于无人机高光谱遥感的水体浊度反演外文翻译资料
- 利用美国印第安纳波利斯市的景观格局指数评估土 地利用和土地覆被模式对热环境的影响外文翻译资料
- 低成本、高精度、单频GPS-BDS RTK定位外文翻译资料
- 数据缺口环境下基于自回归模型的GNSS/INS松耦合集成外文翻译资料
- Loam_livox:一种适用于小视场激光雷达的快速、鲁棒、高精度的激光雷达里程计和建图软件包外文翻译资料
- 基于对IMU与GNSS融合数据的质量评价实现在无人机映射条件下的地理配准外文翻译资料
- 色彩在回族建筑中的研究与应用外文翻译资料



