移动机器人用电机控制系统的设计毕业论文
2021-11-29 21:19:58
论文总字数:19365字
摘 要
伴随着世界的发展,移动机器人在生活中变得随处可见。大到军事、工业领域,小到家庭服务类。移动机器人是一门涵盖了驱动设计与控制、路径设计、多个传感器融合等内容的综合学科。它应用的范围十分广泛,不仅仅是在工业上有作用,在军事上也有着重要的作用,节能、小型化、高性能控制已经成为其主要发展方向之一。这要求控制系统有良好的响应能力并能实现实时反馈。本论文主要研究移动机器人用电机控制系统的设计,在该设计中将用无刷直流电机(BLDCM)来进行设计。主要研究内容如下:
对于设计的背景意义等进行了简单的叙述。对于目前国内国外在移动机器人领域研究取得的成就进行了简介。简述了BLDCM的结构与工作原理。在其等效电路的基础上,建立了数学模型。详细介绍了控制系统的P、PI、PID三种调速控制和五种PWM的调制方式,介绍了位置传感器的种类与霍尔位置传感器的工作原理。在此基础上利用Matlab/Simulink软件进行仿真模型的验证,得出控制系统有效,可以正常运行,达到预定目标。根据设计需求,进行了电机驱动系统的软硬件设计。在以STM32F050C6T6为核心的基础上搭建了电机控制系统的硬件电路与软件流程图。
鉴于环境影响无法进行实物模拟,只能通过仿真的结果验证了所设计系统理论上的正确性,调节速度快并且稳定性较好,可以得出该设计方案可行。
关键词:移动机器人;无刷直流电机;系统仿真;硬件设计
Abstract
With the advancement and development of science,technology and society.Mobile robots have become more and more common in human society.Mobile robots is a comprehensive discipline covering drive design and control,path design,fusion of multiple sensors,etc. It has a wide range of applications,not only in industry,but also in military affairs.Energy-saving,miniaturization,and high-performance control have become one of its main development directions.This requires good control systems The responsive ability and real-time feedback can be realized.This paper mainly studies the control system of the BLDCM for mobile robots,which has more advantages than the BLDCM.
In this paper,the background and significance of research and design are first introduced,and the development history of the BLDCM and the current domestic and foreign research achievements in the field of mobile robots are briefly introduced.The mathematical model is established based on the working principle and its equivalent circuit.Afterthat,the three speed control of P,Pl,PID and five PWM modulation methods of the control system are introduced in detail.On this basis,the Matlab of the control system is built/Simulink simulation model to verify the feasibility of the program.Finally,combined with the system requirements,the hardware and software design of the motor drive system was carried out.The hardware circuit and software flowchart of the motor control system were built on the basis of STM32F050C6T6 as the core.
In view of the fact that the physical impact cannot be simulated,the theoretical correctness of the designed system can only be verified by the results of the simulation,the adjustment speed is fast and the stability is good,it can be concluded that the design scheme is feasible.
Key words:mobile robot;BLDCM;system simulation;hardware design
目录
第1章 绪论 1
1.1 引言 1
1.2 课题研究意义 1
1.3 移动机器人的研究现状 2
1.3.1 国外研究现状 2
1.3.2 国内研究现状 2
1.4 主要研究内容 3
第2章 BLDCM的运行原理与控制原理 4
2.1 BLDCM的简介 4
2.1.1 有刷与无刷直流电机的结构 4
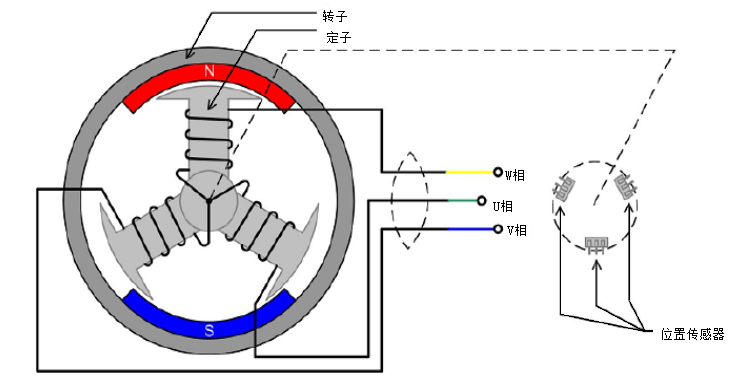
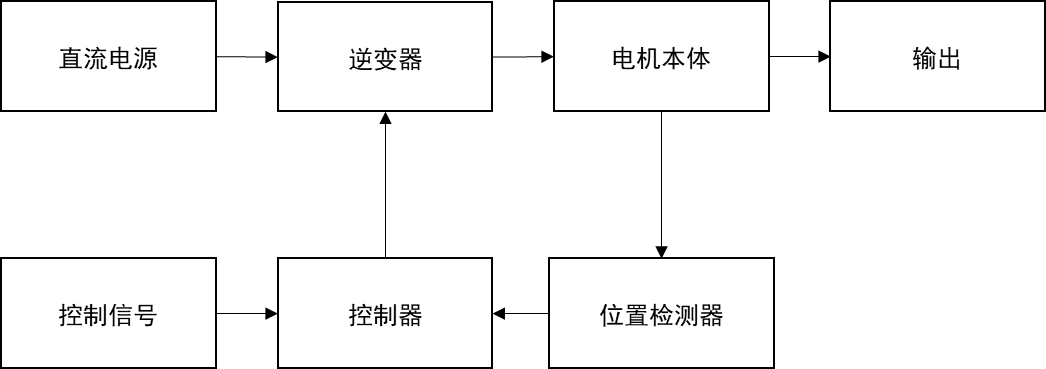
2.1.2 BLDCM的系统组成 5
2.1.3 BLDCM的优点 6
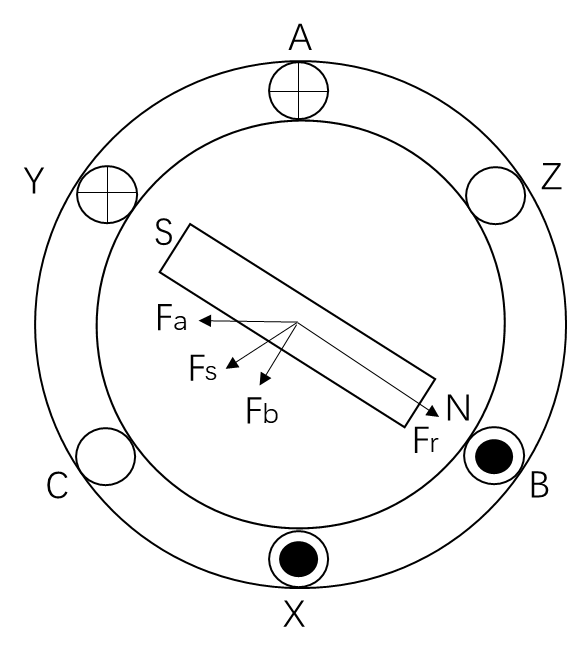
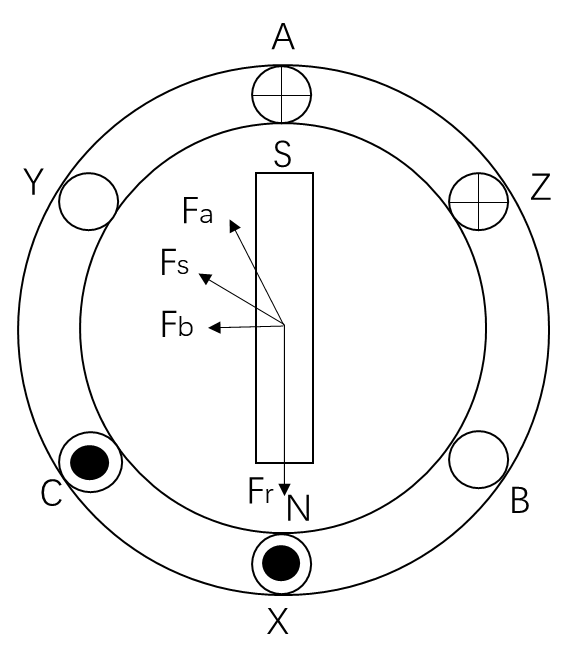
2.2 工作原理分析 6
2.3 BLDCM的数学模型 8
2.3.1 电压状态方程 8
2.3.2 反电动势方程 9
2.3.3 电磁转矩方程 10
2.3.4 运动方程 10
2.4 本章小结 10
第3章 BLDCM的控制系统设计 11
3.1 需求分析 11
3.2 调速控制设计 11
3.3 PWM调制方式选择 12
3.4 位置传感器选择 13
3.5 本章小结 14
第4章 Matlab建模与仿真 15
4.1 仿真模型建立 15
4.1.1 BLDCM仿真本体模块 15
4.1.2 三相全桥逆变模块 18
4.1.3 电流滞环模块 19
4.2 仿真结果及其分析 19
4.3 本章小结 21
第5章 BLDCM控制系统的软硬件设计 22
5.1 BLDCM控制系统的硬件设计 22
5.1.1 硬件设计总体框图 22
5.1.2 微控制单元外围接口电路 23
5.1.3 电源电路 23
5.1.4 驱动电路 25
5.1.5 信号采集电路 27
5.2 BLDCM控制系统的软件设计 29
5.2.1 主程序设计 29
5.2.2 子程序设计 30
5.3 本章小结 33
第6章 总结与展望 34
参考文献 35
附录 36
致谢 39
第1章 绪论
1.1 引言
电机通过电源驱动可当作其他机械动力源的装置,大体上可将其分为同步电机、异步电机、直流电机三种,不同类型的电机可以适应不同的工作环境与工作要求[1]。在当今世界的各个领域,电机已经得到非常广泛的应用。而随着科技的发展与进步,无刷直流电机因其高效率、低故障率、低损耗、可用时间长等优势,在智能化领域具有很好的发展前景,被越来越多领域所使用。
自从电磁感应定律出现,就为电机的诞生打下了基础。世界第一台直流电机是一种有刷电机。这种传统电机维护与修理难度很大,并且成本很高。所以人们想要设计一种成本低、不易坏、易维修的电机,在这期间经历了科学家们经历了近乎百年的探索与研究。直到1955年美国 D.Harrison带领其团队成功研制出用晶体管换相去代替机械换向器。BLDCM的雏形由此出现。之后经历多年研究,使用霍尔元件换相的BLDCM出现了。这种电机拥有能稳定运行、可以平滑调速等优点。之后经历多年的不断发展研究,BLDCM渐渐走向实用阶段。有资料显示,无刷直流电机的使用规模以每年百分之15的速度迅速增加,并且在很多领域有着广泛的应用[2]。
BLDCM的输入波形有方波与正弦波两种。其中,正弦波输入的结构复杂,但是控制精度高,方波输入的结构简单但是控制精度较低。在本论文中主要研究的是方波输入,因为方波输入的BLDCM应用比较广泛。
1.2 课题研究意义
在1956到1972年间,美国的Charlie Rosen制造出了世界上第一个移动机器人,由此人们对于人工智能有了新的认知,对于其技术的研究也到达了新的领域。移动机器人是一个十分智能化的系统,对于外界有着很强的感知能力,既可以按照提前输入的命令进行工作,也可以判断当前环境做出相应改变。它可以在危险的环境中工作,所以其在工业与军事领域有着极其重要的作用。
在战场上使用小型机器人作战有着灵活、快捷、方便等优点。国外的一些国家对于移动机器人技术研究较早,已经达到一个很高深的领域,但是我国对于地面移动机器人的研究起步较晚,并且由于国外的技术限制,所以我们全部要自己从头摸索,所以研究移动机器人技术十分重要,可以拉近我国与国外的科研水平。而其中重要的技术就是运动控制系统的开发与研究,而无刷直流电机因其高效率、低故障率、低损耗、可用时间长等优势,将它作为机器人执行机构已经成为现如今研究的主要趋势。
1.3 移动机器人的研究现状
1.3.1 国外研究现状
随着世界的进步,科学家们对于移动机器人的研究进入了一个新的发展阶段,研究技术得到了迅速发展并且研究内容更加智能化与多样化。1996年美国航空航天局从肯尼迪航天中心向火星发射了一个名叫“Mars Pathfinder”的机器人,它可以对火星的地形、地貌、空气、物质构成等进行取样研究。之后美国航天局研究出一款可以代替人工去检修太空设备的机器人,名为“Lemur”。美国纽约哥伦比亚大学的科学家研制出一种由DNA分子组成的机器人,这种机器人十分微小,并且外形与蜘蛛很相似,其可以进行行走、转向等简单的活动,也可以进行制造一些小零件等复杂活动。日本本田制造的成称为世界最先进的类人机器人“阿莫西”,它可以模仿人类动作、活动甚至洞察人类心思等。日本大阪大学研制的CB2机器人可用来研究真实儿童的生长过程,他可行走、爬动、说话等。波士顿研究的地球上最先进的全地形机器人“BigDog”,可在复杂地形行走、跑、攀爬并可携带重物。
还有美国的爆炸物处理机器人,日本的消防营救机器人,瑞士的“达芬奇”手术机器人等。通过以上这些例子可以知道,对于机器人的研究是当下的热门研究,研究种类、研究方向、研究范围都逐步加深。这些例子无一不在说明世界对于机器人技术的研究处于一个快速发展的阶段。因此我们需要紧跟时代步伐,加大对这方面研究的力度。
1.3.2 国内研究现状
由于我国移动机器人技术发展较晚,起步较慢,因此与先进国家研发进度有些差距,但是在国家的大力支持之下,我国的移动机器人技术也迎来了迅速发展。在科学技术部领导的“十五”863计划中,多家科研单位经过三年的不断奋斗在仿人机器人方面取得了巨大的进步,研制出一款名叫“汇童”的仿人机器人。他在视觉、听觉、触觉、逻辑思考等方面与人十分相似,是我国自主研发的达到了世界领先水平的类人机器人。2011年,南京军区通过5年的时间突破10多项难题去研究制造了我国首台遥控防化侦察机器人,它的主要功能是可以代替工作人员去那些复杂危险多变的环境中执行测量、侦察、取样和处理等工作。还有2008年的福娃机器人,在2010年中国高交会上,我国中科院展示的新种类机器人足足有73种,让人叹为观止,让世界大吃一惊等等。这些无一不在说明我国对于机器人技术的研究发展神速,到达了世界先进水平。同时不能骄傲自满,要继续加大这方面的研究,研究的更加深入,研究的更加全面,争取达到引领世界的水平。
1.4 主要研究内容
本文主要进行移动机器人在电机控制系统方面的研究,拟用无刷直流电机研究出一个可以平稳调速运行的控制系统,主要研究内容如下:
(1)控制系统总体方案的设计。了解了BLDCM的基本构成,知道了控制系统的组成,分析了系统的运行原理,最后查阅相关资料建立了电机的数学模型;
请支付后下载全文,论文总字数:19365字
相关图片展示: