铁路场景下的LiDA点云分割方法研究毕业论文
2021-12-05 17:35:59
论文总字数:16553字
摘 要
铁路运输在国民经济中占有越来越重要的地位,这也对铁路运输的安全性提出了更高的要求。进行铁路设备研究的点云数据可以通过移动成像设备快速获得。如何从大规模的铁路点云数据中提取出有用的信息是研究的重点方向。铁路点云中关键的组成部分有铁轨,接触线,承力索,回流线以及相应的电线杆塔配电箱等设备。
论文主要研究了如何利用PCL库中点云分割的相关算法和铁路设备的先验知识来对铁路点云中的三种类别的电力缆线目标即接触线,承力索和回流线,还有一对铁轨目标进行识别。并对不同的点云分割方法在该场景下的应用进行总结。
研究结果表明:使用随机采样一致性和欧式聚类的算法可以快速分割出点云目标。
本文特色: 充分利用铁路设备自身拓扑结构进行铁路点云分割。
关键词:雷达;铁路点云;移动成像;分割;识别;
Abstract
Railway transportation has been playing an important role in national economy, which also puts forward higher requirements for the safety of railway transportation. Point cloud data for railway equipment research can be quickly obtained by mobile imaging system. How to extract useful information from large-scale railway point cloud is the aim of the study. Key components of the railroad corridor are contact cable, catenary, return current cable and mast and cantilevers。
This study uses the algorithms from the open source library PCL to recognize two pair of rail tracks and three different overhead power cables. This study also compares the different methods used in point cloud segmentation.
This study features:classification is carried out by applying constraints based the topological relationships among rail road objects.
Keywords: LIDAR; railroad point clouds; mobile mapping; segmentation; object recognition;
目 录
第一章 绪论 1
1.1引言 1
1.2 文献综述 1
第一章 铁路设施结构 3
2.1 铁路的拓扑结构 3
2.1.1 轨道路基 3
2.1.2 铁轨 3
2.1.3 电力缆线 3
2.1.4 电线杆和电缆悬臂 3
第三章 铁路点云的分割 5
3.1点云数据预处理 6
3.2 电力缆线的提取 7
3.2.1 滤波处理 7
3.2.2 划分不同电力缆线所在区域 9
3.3.3 电力缆线的识别 13
3.3 铁轨目标的提取 15
3.3.1 铁轨目标的分割方法 16
第四章 实验结果分析 20
4.1 电力缆线分割结果总结 20
4.2 铁轨分割结果总结 21
4.3 整体识别效果 22
第五章 总结与展望 23
参考文献 24
致谢 25
第一章 绪论
1.1引言
铁路运输受气候和自然条件影响小,且运输能力和单车装载量大,运输成本低,加上各种配套的车厢,铁路运输几乎能运输任何商品,且不受容量和容积的限制,这些都是公路和航空运输方式无法比拟的。铁路运输包括货运和客运,我国年铁路货运总量居世界首位,在客运方面我国与印度居于世界前列为11,905亿人每公里。根据国家发展战略,铁路运算在今后的很长一段时间里都将是我国货物运输的主力,铁路运输在国民经济中占有重要地位的同时,也对铁路设施的安全性提出了更高的要求,铁路事故一旦发生必定后造成重大的经济损失和人员伤亡。造成铁路事故的首要原因是人为操作不当(38%),其后是铁轨故障(29%)和设备老化(13%)。为了保证铁路设施能安全稳定的运行,有必要对铁路轨道,结构,电力线等设施进行定期的检查,传统的铁路检修方式主要依靠铁路检修工人手持人工仪器和目视的方法来判断铁路的运行情况,但这种检修方法通常只能得到特定时间段的铁路局部信息,且检修时必须中断铁路服务,可能带来一些不必要的经济损失,同时更不用说耗费的大量人工成本,和人的主观因素可能带来的不确定性。
机载激光雷达测距技术是一种利用激光的数据采集技术,它具有数巨量大。高效性等诸多优点,目前已经广泛应用于电力,铁路,道路,和建筑物的提取中目标数据,本研究的目的就是应用相应的雷达点云分割算法从庞大的铁路雷达点云数据中自动识别出关键的铁路设备,如铁轨,电力线和电力线上方的承力索等。铁路雷达点云数据由固定在火车头部的移动测图系统得到,在火车运行的同时扫描相应的铁路段便可得到对应的雷达点云数据。利用点云分割算法得到不同的铁路设施结构后可以让计算机针对目标的特性进行学习,利用相应的机器学习算法便可对铁路设施进行检测和管理。点云分割通常由聚类和分类两部分组成,聚类根据一个或多个相似的特征把类似的点组成一个集合,如三维点间的几何特征,法线,曲率,或颜色,特征强度等信息,接着就是给不同的聚类赋予不同含义,也就是对目标的识别。对铁路点云场景种的不同设备对应的点云进行快速,准确,鲁棒的分割具有重大的研究价值和意义。
1.2 文献综述
近年来随着3D传感设备的不断发展,以极低的成本就可以获取大量的3D点云数据,点云数据就是一系列的点的合集,这些点集可以真实的重现空间中的三维物体。点云数据集是一个庞大的数据集,其中包含了大量的信息如空间位置,几何形状等,主流的点云分割算法有区域生长算法,基于模型匹配和基于机器学习的点云分割算法。区域生长算法最早由P. J. Besl and R. C. Jain[[1]]提出,算法的输出是一个聚类的集合,每个集合对应着一个光滑的表面。算法首先从曲率最小的点出开始生长,因为曲率较小对应着平面,这样可以减小区域生长的时间,对每一个邻域点比较当前点的法线和种子点间法线的夹角,小于平滑阈值的邻域点则加入当前区域,就是一个平面区域不断增加的过程,区域生长算法在识别由多个平面构成的物体时通常有较好的效果。而基于模型匹配的算法中最有代表性的就是RANSAC算法,也即随机采样一致性,2015年Wang et al[[2]]介绍了一种基于 RANSAC 的修正方法,可以识别平面,球等几何基元目标。该算法随机在点云数据集中选择若干个子集,并且根据子集中的点算出相应的模型的数学表达式,如根据由两个点构成的子集中点可以计算出一条直线方程,然后设定相应的阈值,统计有多少点和这个方程的距离在误差允许的范围内,重复这一过程,最终在误差允许范围内的点最多的集合代表的方程就是要提取的模型的方程。该算法因为涉及了数学建模的过程,所以主要应用于提取线性目标或圆柱等模型较好得出的目标。,在2018年,PointNet[[3]]提出了利用深度学习对点云目标进行分割,是点云分割邻域新兴的分割方法。
具体到铁路点云分割方面国内对铁路点云分割的研究通常是通过机载雷达获取的数据对铁路上方电力线进行分割。余洁,穆超,冯延明等利用三维霍夫变换分离出电力线点,最后再利用函数拟合得到电力线的方程[[4]]。王平华,习晓环,王成等在对电力线的提取中,利用随机采样一致性的方法对电力线进行提取[[5]]。王凡,许筱通过结合铁路区域的空间分布特征,先提取出最上方的承力索,在利用alpha-shapes算法对轨道点进行检测[[6]]。在国外,2015 年,Arastounia[[7]]针对特定的乡村铁路提出了一种铁路点云分割方法,通过结合铁路的先验知识,先分割出铁路轨枕目标,其次通过设定相应的阈值提取出铁轨,最后根据铁路的拓扑结构分割出电力线目标。2018 年,A. Sánche[[8]]利用隧道先验知识结合区域生长算法将点云分割分成地面分割和非地 目标分割,对隧道中的目标实现了良好的分割效果。陈坤源,程明,王程利用霍夫检测和中心点偏移对承力索的悬挂点进行了提取[[9]]。铁路点云分割中最多研究的是铁轨和电力线目标,铁轨和电力线都是线性目标,是由一些基本的几何基元组成,所以采用基于模型驱动的方法可以较好的分割出目标物体,但由于该算法引入了相应的数学模型,当分割目标比较复杂时,采用模型匹配的方法就较难得到满意的效果。此时就需要采用基于数据驱动的算法,深入研究每个点集邻域的一些属性,结合先验知识设定相应的阈值来得到最终的分割结果。在论文中结合使用了基于模型驱动和数据驱动的方法,以达到鲁棒性更好的分割效果。
- 铁路设施结构
2.1 铁路的拓扑结构
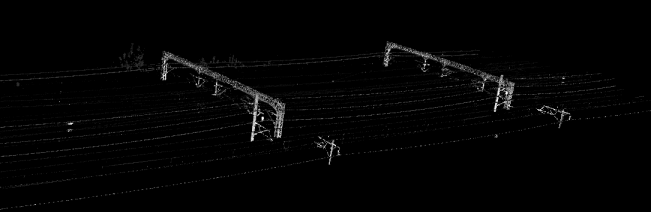
进行铁路点云分割时必须结合相应的铁路拓扑结构,图1是按灰度图显示的铁路点云数据,在图中标注出了轨道路基,电线杆,铁轨,植被。图2是按高程显示的铁路点云,这样可以更清晰的研究铁路上方线缆间的拓扑关系,标注出了承力索,接触线和回流线。
2.1.1 轨道路基
轨道路基是由很多很多坚硬的小石子铺成的,主要目的是为了保持干燥并防止植被的生长,从而对铁轨造成影响,轨道路基所在的区域就是铁路廊道的区域,铁轨位于其上方,轨道路基很平整,最高点和最低点的高度差不超过25cm。虽然不是铁路设施的关键组成部分,但可以通过确定轨道路基所在的位置从而进一步确定铁轨的位置。
2.1.2 铁轨
铁轨是由两条首尾平行的钢材组成,根据国家标准规范,一对铁轨其中间的距离是1.435m,且铁轨的标准高度为142mm和172mm。
2.1.3 电力缆线
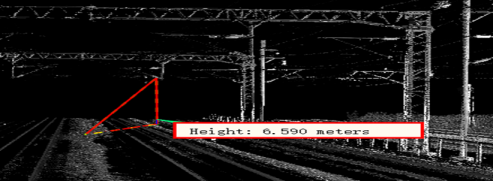
铁轨上方高度最低的线是接触线,起到传输电能的作用,接触线在距离地面5米以上的高度处,在这高度之前没有其他的设备。在接触线的正上方是承力索,承力索不同于笔直的接触线,是有一定的弧度的,起到固定接触线的作用。在杆塔的正上方是回流线,也是所有电缆中高度最高的。这三类电力缆线是铁路上方电缆的主要组成部分。如果从上往下投影,接触线和承力索是完全重合的,且它们的投影位于一对铁轨之间。
2.1.4 电线杆和电缆悬臂
电线杆和电缆悬臂都是起到固定相应的电力缆线的作用,电线杆每隔55米分布。
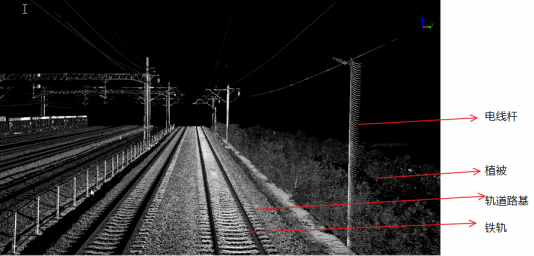
图2.1 灰度图显示的铁路点云
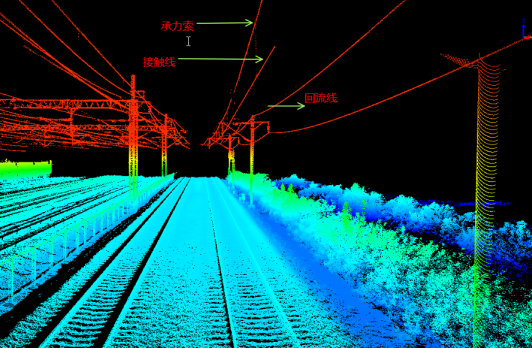
图2.2 按高程显示的铁路点云
第三章 铁路点云的分割
论文的目的是从铁路点云数据中分割处铁轨目标,和其上方的接触线,承力索,及回流线目标。对点云数据的处理依赖于PCL库,PCL库是跨平台的开源C 编程库,实现了大量点云相关的通用算法和高效的数据结构,涉及点云的获取,滤波,分割,配准,检索,特征提取,识别,追踪,曲面重建,可视化等。在PCL库中目前实现了进行分割的基础架构,现有的分割算法是鲁棒性较好的聚类分割和基于随机采样一致性的分割,在本实验中综合运用两种分割算法,并结合点云可视化软件cloud compare和雷达可视化软件LIDA360进行点云数据的观察和对分割的结果的验证。
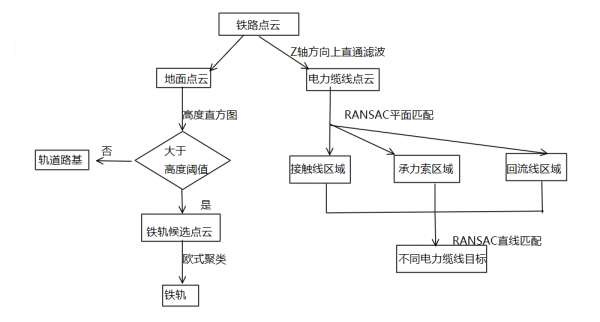 铁路点云分割的基本思路是,首先通过Z轴方向上的直通滤波,将点云数据分为地面点云和电力缆线点云两部分,地面点云中包括待识别的铁轨点云。对于电力缆线点云根据不同电力缆线的拓扑结构,得到不同电力缆线构成的一个大致的平面区域,在该平面区域中运用随机采样一致性算法分割出电力缆线目标。对应地面点云,首先做出地面点云的高度直方图,根据高度直方图找到高度阈值,利用高度阈值滤除轨道路基目标,得到铁路候选点云,在候选点云中运用欧式聚类的算法得到铁轨目标。点云分割处理流程图如图3-1所示铁路点云分割的过程中相关算法都涉及到最近邻搜索,因此需要使用PCL中的K-d tree数据结构,Vosselman[[10]]对这种数据结构进行了详细的解释,这种数据结构用来组织K维空间中点的合集,是一种带有约束条件的二分查找树,在处理点云数据时需要应用3维kd-tree,从头节点开始,在往后的每一级上根据特定的维度分开所有的子节点,例如对一组空间中的点集合,先根据寻找Z轴方向上的中位数,然后以该中位数作为分割值,小于该中位数的点集在左子树,大于该中位数的点集在又子树,接下来在根据X轴方向上的中位数进行划分,继续向下形成新的子树。这样利用K-D tree可以在log(n)的时间复杂度内在相应点集中找到给定点的最近邻,PCL的k-d tree数据结构,基于FLANN进行快速最近邻搜索。在区域增长和随机采样一致性算法中都需要利用该数据结构进行最近邻搜索。
铁路点云分割的基本思路是,首先通过Z轴方向上的直通滤波,将点云数据分为地面点云和电力缆线点云两部分,地面点云中包括待识别的铁轨点云。对于电力缆线点云根据不同电力缆线的拓扑结构,得到不同电力缆线构成的一个大致的平面区域,在该平面区域中运用随机采样一致性算法分割出电力缆线目标。对应地面点云,首先做出地面点云的高度直方图,根据高度直方图找到高度阈值,利用高度阈值滤除轨道路基目标,得到铁路候选点云,在候选点云中运用欧式聚类的算法得到铁轨目标。点云分割处理流程图如图3-1所示铁路点云分割的过程中相关算法都涉及到最近邻搜索,因此需要使用PCL中的K-d tree数据结构,Vosselman[[10]]对这种数据结构进行了详细的解释,这种数据结构用来组织K维空间中点的合集,是一种带有约束条件的二分查找树,在处理点云数据时需要应用3维kd-tree,从头节点开始,在往后的每一级上根据特定的维度分开所有的子节点,例如对一组空间中的点集合,先根据寻找Z轴方向上的中位数,然后以该中位数作为分割值,小于该中位数的点集在左子树,大于该中位数的点集在又子树,接下来在根据X轴方向上的中位数进行划分,继续向下形成新的子树。这样利用K-D tree可以在log(n)的时间复杂度内在相应点集中找到给定点的最近邻,PCL的k-d tree数据结构,基于FLANN进行快速最近邻搜索。在区域增长和随机采样一致性算法中都需要利用该数据结构进行最近邻搜索。
请支付后下载全文,论文总字数:16553字
相关图片展示: