伺服电机驱动系统自抗扰控制研究开题报告
2020-02-20 09:59:08
1. 研究目的与意义(文献综述)
-
选题的目的和意义
由于伺服驱动系统不仅具有高精度的控制性能,而且具有优异的动态性能,还具有对信号实时跟踪的特性等,因此高性能伺服系统在许多精密的运动控制中有着很广泛的应用,大到国防科技工业实体,小到出行运输居家安乐,从方方面面服务于人们的生活。因此,如何能提高伺服系统性能的研究有着很好的实用价值和现实意义。而由于伺服电机驱动系统中的机械传动部分会存在一定的弹性,会引发持续的机械谐振。而机械谐振的存在会对伺服系统产生很多不利的影响,会使伺服控制系统的转速与电磁转矩发生明显且持续的震荡现象,这样会影响到当前控制系统的控制精度、响应速度等,同时在某种程度上会限制系统频带响应宽度的提升,严重时会致使系统失稳、传动连接装置损伤及断轴等情况发生,降低控制系统性能,使伺服装置达不到预先设计的目标。
因此想要提高伺服系统的性能,如何有效地抑制机械谐振是很重要的研究内容,一个实用的抑制方法可以使得伺服系统的性能在精度和稳定性上都会有大幅度的提升。基于此我们可选择采用自抗扰控制的方法,所谓自抗扰,就是将未建模动态和外扰都归结为对象的未知扰动,用输入输出数据估计并给予补偿,从而实现动态系统的动态反馈线性化,再使用非线性配置构成非线性反馈控制律来提高闭环系统的控制性能,所以自抗扰控制器对对象的适应能力肯定要大于非线性pid,而控制性能也将优于非线性pid。事实上,该控制器在实际应用中取得了良好的效果。即自抗扰控制技术是不依赖被控对象精确模型的、能够替代pid控制技术的、新型实用数字控制技术。自抗扰控制技术自提出以来,在国内外已经得到了大量的应用,该技术多用于电力系统、化工系统、精密机械加工、军工系统等领域中。
剩余内容已隐藏,您需要先支付后才能查看该篇文章全部内容!2. 研究的基本内容与方案
本文的主要研究内容
谐振频率是机械结构的固有特性,机械谐振频率落在伺服系统带宽内或者附近时,当有谐振频率转矩信号(包括电磁转矩或者负载变化)作用到机械传动系统中,都可能会引发持续的机械谐振。在本次课题中,将采用基于自抗扰控制器(auto/active disturbances rejection controler,adrc)技术的方法来抑制机械谐振,自抗扰控制器主要由跟踪微分器、扩展状态观测器和非线性状态误差反馈控制律三个部分组成,其框图如图3所示。
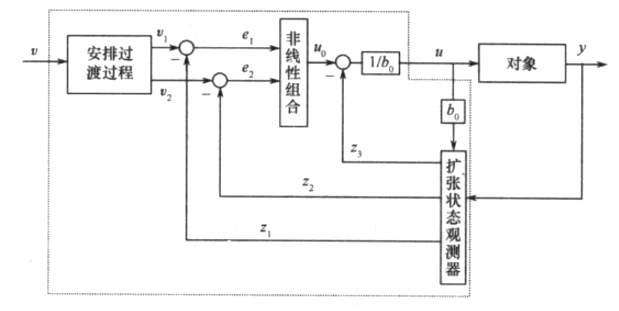
图3 自抗扰控制器框图
剩余内容已隐藏,您需要先支付后才能查看该篇文章全部内容!3. 研究计划与安排
第一、二周(2月18日至3月3日):了解论文选题,查阅相关资料和文献并对课题进行详细的了解分析,理解课题及任务书要求;着手进行论文的开题报告;
第三周:大量收集论文资料,理清论文思路,对论文思路有大概的规划,完成并提交开题报告;
第四、五周:正式开始论文的工作,阅读了解研究课题所需要的资料文献,完成中英文摘要部分内容,深化、细化技术方案,列出论文中研究内容所需要解决的问题,构造论文的总体框架;
剩余内容已隐藏,您需要先支付后才能查看该篇文章全部内容!4. 参考文献(12篇以上)
[1] 杨影等. 转速负反馈在伺服系统机械谐振抑制中的应用研究.电工技术学报,2018,33(23): 5459-5469
[2] kang jian,chen songlin,di xiaoguang. online detection and suppression of mechanical resonance for servo system[c]//2012 third international conference on intelligent control and information processing (icicip), dalian, china, 2012: 16-21
[3] 郎志, 杨明, 徐殿国. 双惯量弹性系统负载扰动观测器设计研究[j]. 电工技术学报, 2016, 31(增刊 2):84-91
剩余内容已隐藏,您需要先支付 10元 才能查看该篇文章全部内容!立即支付



