研究电机在电动车辆再生制动系统中的转速测量外文翻译资料
2022-09-07 14:46:06

英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
研究电机在电动车辆再生制动系统中的转速测量
Chaofeng Pan, Liao Chen , Long Chen , Haobin Jiang , Zhongxing Li ,Shaohua Wang
摘要:
转速信号的采集和处理技术被广泛应用于旋转机械。为了在再生制动过程中实现对电机驱动的精确和实时控制,需要研究电动汽车中的转速测量技术。获得准确的电机转速信号,将有助于再生制动控制平稳,可以实现更高的能量回收率。本文旨在开发一种以马达旋转的形式来提供瞬时速度信息的方法。首先它涉及在电动车辆的再生制动系统中电动机转速的测量原理。文章进而提出理想和实际霍尔位置传感器信号的特性,显露出电机之间的转速关系和霍尔位置传感器信号。最后,基于测量误差对霍尔位置传感器信号调节和处理电路及程序马达转速测量进行了分析。
关键词:再生制动 霍尔位置传感器 单片机 电机转速和方波
1.简介
由于电动车辆的储能系统的容量有限,纯电动车辆的行驶范围是有限的,因此电动汽车的广泛使用受到限制。如果电动车辆的动能可以由再生制动系统转化为电能,并回收到车辆的存储系统中,电动车辆的能量效率将得到改善,以及电动车辆的驱动范围将延长。先前的研究表明,通过再生制动系统电动车辆的能量效率可以提高8%-25%。[1]在再生制动过程中,利用的有效的措施实现能量回收,车辆纵向动力学稳定性还需要维护。在车辆动态控制研究中,转速,侧滑角以及其他动态参数可以通过间接方法或直接方法由传感器进行测量。目前许多研究工作已经取得了很大的进步,各种方法都用于估计控制系统的状态和车辆的动态响应。相关模式的估计量在非线性系统[2,3]中使用,不确定线性参数变化(LPV)系统模型的建立是为了估计四轮独立驱动电动汽车的侧滑角度。在车辆横向动态控制中,纵向速度不是恒定的,而是一个范围内变化。因为纵向速度对应的旋转速度电动机,旋转速度是电动车辆的电机控制系统中关键输入参数,因此,它是非常重要的,需要精确地测量转速[4]。在制动过程中的制动转矩和车辆速度需要实时,准确地控制,电动车辆的再生制动系统控制装置还需要获得准确的电机转速信号[5]。
转速传感器通常在模拟模式下输出信号,模拟信号应用于电路和适宜于测量的条件中,它可以被编程以匹配测量系统的设计规范和调整它来用于具有不同的输出信号特征的一类传感器[6]。基于数据采集的机制,转速的测量可被分类成两组:基于计数器的定时器方法和基于ADC的方法[7]。基于定时器和计数器的方法在概念上是在规定的时间内测量连续脉冲或计数脉冲之间的时间间隔。而基于ADC的方法是将角速度信号作为普通的模拟信号。多个信道信号的速度可以同时使用多通道模数转换器板进行测量时,ADC的模拟速度信号在测量过程中转换成数字信号。数字数据被记录在一个固定的采样率,所以它们记录度信号的时间和幅度[8,9]。模拟信号调节主要是用于测量电机转速,并应用于发电机的转速测量。基于微控制器的数字测速系统由于它处理能力良好,成本低,可靠性高的优点已被广泛应用于电动机控制系统。
与此前发表的作品相比,本文研究了在电动汽车中电机瞬时旋转速度的三相测量方法。该方法不需要专门的设备,而是最大程度地使用一般的数据采集系统和计算机资源。因此,本文侧重于一般的信号调理电路为基础的方法和编程方法。这两种技术的目的是在提供良好的测量精度,瞬时旋转速度范围较宽,使得它们可以被应用到再生制动过程控制车辆和其他应用程序。接下来的部分提供了在电动车辆的再生制动系统中电动机转速的测量原理。文章进而提出理想与实际霍尔位置传感器信号的特性,显露电动机转速和霍尔位置传感器的信号之间的关系。因此,第3节介绍霍尔位置传感器信号调节和处理电路,基于测量误差的分析,程序对电机转速进行了测量。在第4节,本文总结了基于该分析下,所提出的方法可以适用于电动车辆的再生制动控制和其他需要瞬时转速测量范围广泛和多种渠道的应用程序。
2.电机转速测量的原则
2.1再生制动系统的结构和原理
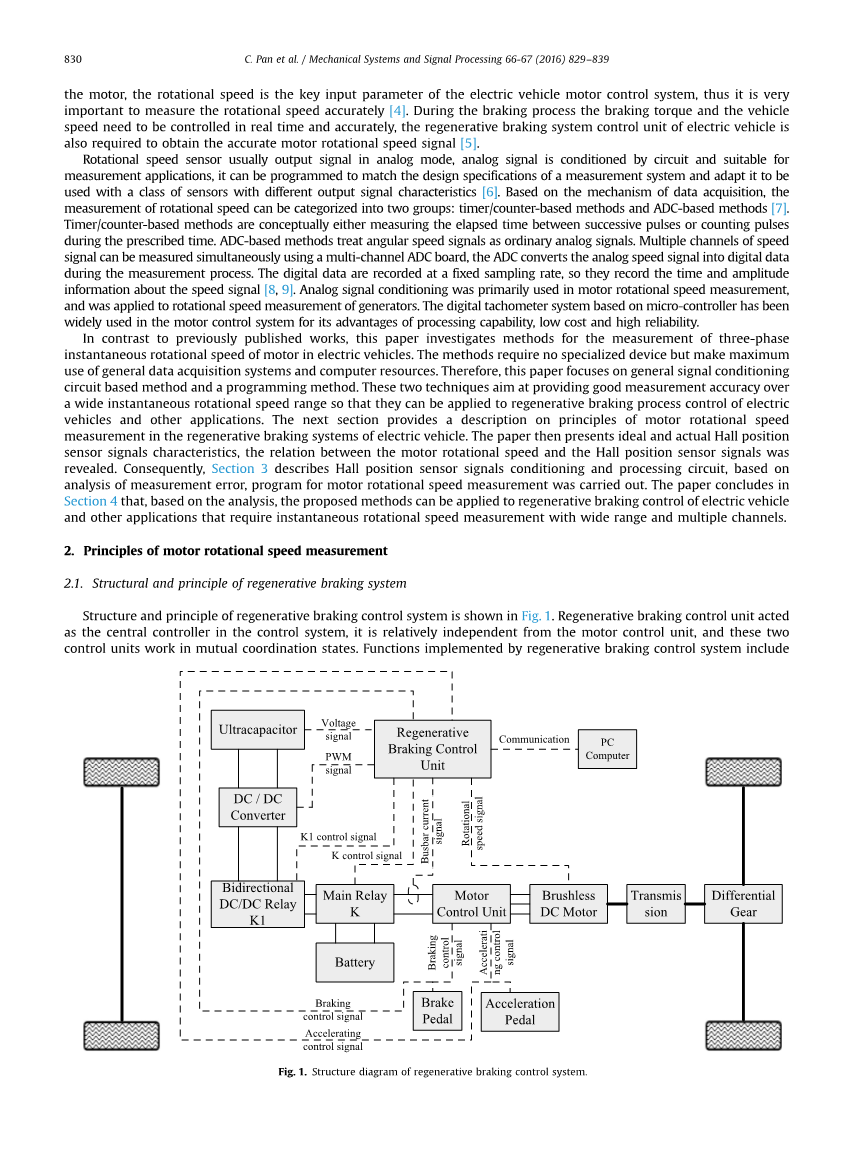
再生制动控制系统的结构和原理图1所示。再生制动控制装置作为控制系统的中央控制器,它是相对独立的电机控制单元,这两个控制单元工作在相互协调的状态。再生制动控制系统实现的功能包括以下几个方面:
- 主电路的切换控制:电池和超电容器连接到主电路,通过主继电器开关实现了这2个储能单元的切换控制。电池在电机驱动模式下进入主电路,电池断开再生制动模式,并将超电容器返回主要电路同时进行能量回收。
(2)识别驾驶员的意愿:通过从油门踏板和刹车踏板收集来的加速度信号和刹车信号来实现驾驶员意图的识别。
(3)再生制动控制:通过采集电机转速信号,确定电机的运行状态,超电容电压和母线电流。然后将切换控制命令发送到双向直流/直流继电器和将脉冲宽度调制(脉宽调制)命令发送到直流/直流转换器的电源开关,从而提高或实现了超电容器的降压充电。
(4)通过控制系统与计算机之间的通信,再生制动控制系统的操作状态信号,如母线电流、电机转速、超高压等,由计算机实时显示和存储。此外,该控制系统还可以接收来自计算机,一些被自动控制的人工操作的命令,如模拟加速度信号和模拟制动信号等。
从霍尔位置传感器获得再生制动控制单元的电机转速信号,电机转速信号的采集控制单元不受影响,其他信号再生制动控制单元不需要电机控制单元,因此,再生制动控制单元和电机驱动控制单元可分别工作。
图1再生制动控制系统的结构图
2.2电动机转动速度和电动机馈送特征的分析
在再生制动时,控制系统通过转速信号收集确定电动机供给电压的幅度。与超电容器的电压进行比较,升压再生制动是当电源电压比超电容器的电压低时使用,并且降压再生制动是当电源电压比超电容器的电压高时使用。电机转速信号之间的关系和电动机供给电压应事先根据电动机的转速信号来获得。
在电机馈送的过程中,电动机处于发电状态,并且外部电源不再可用,电机中的转子由惯性能量或负载驱动,感应电压由电动机的定子绕组产生,同时,如果所用的电动机外部电路形成的电路环路中,三相交流制动电流生成时,电动机处于发电模式。同时,发动机控制单元作为一个整流器中扮演了重要的角色,通过在其内部开关反向并联二极管,如图2所示。在发电模式下,电机的两相电流在任意时刻导通。假设A相和B相在导通,电流的方向被示出为图2中虚线的方向。其中,,是反电动势的峰值。由于无刷直流电动机的电枢绕组和电路结构,电动机感应电压可表示为
(1)
其中p是电动机的转子的极对数,n是每相导体的总数,是每极的气隙磁通(wb), n为电机转速(rpm)。是电机的反电动势系数(v/ rpm)。如公式(1)所示,电动机感应电压与电机转速成正比,在再生制动系统中通过电动机转速信号可以采取降压 - 升压控制。
图2电机发电状态
3.霍尔位置传感器信号特征分析
电动机旋转速度信号由三相霍尔位置传感器获得。连续脉冲的旋转转速之间的时间测量可以用两个组件来实现:一个中断服务程序和一个定时器[10]。速度脉冲信号被用作为一个中断信号。当速度脉冲的上升沿时,中断服务程序请求。基于中断服务程序的编程策略,下面的两个类型的方法可以区分。第一个变化是使用前沿的速度脉冲停止和启动定时器。中断服务程序将执行以下任务顺序:禁止中断,停止定时器,定时读取内容,初始化定时器和允许中断。第二个变化是使用前沿或速度脉冲的下降沿停止和启动计时器,但计时器整个测量过程持续运行。因此,经过一个速度脉冲周期的时间是计时器第一变化的相应读数和第二变化的两个连续计时器之间的读数差异。
3.1理想的霍尔位置传感器信号特征
假设电机极对的数量是p .因为霍尔位置传感器内部有三个阶段电机,如果他们是根据120度相位差严格地安装,所产生的信号波形的图如图3所示。每个阶段产生的数量的平方波霍尔传感器是P时,电机被接通360度电动角。三个霍尔位置传感器严格按照120度相位差安装。输出信号是由三相位置传感器对称的矩形波(高电平输出)进行的180度电角(每一个方波的周期为360度电角)产生。三相方波之间存在120度电角度的差异。对于三相方波霍尔信号,如果两个相的信号由AND运算彼此合并,然后通过OR运算叠加起来,霍尔位置传感器信号的结果是如式叠加在一起。 (2)所示,三相具有相同的时间间隔和1201对称电角度差的方波信号时所产生的马达旋转下恒定瞬时速度3601电角周期,如图4所示。
A是第一阶段的霍尔位置传感器信号,B是第二阶段霍尔位置传感器信号,C是第三阶段霍尔位置传感器信号。
图3理想的三相霍尔位置传感器的信号
图4理想的方波
从上升沿到下降沿每个方波信号的经过时间相等,且它们的电角也同样是60度。当电动机旋转360度电角度时许多方波产生的是3P。因此,该电机旋转速度测量的精度可通过使用单相霍尔位置信号测量提高2倍。
3.2实际霍尔位置传感器信号特征
实际霍尔位置传感器信号的测量误差来自许多方面。半导体制造工艺和霍尔传感器元件的固有特性将导致信号测量存在误差,这往往表现为零误差和温度漂移误差。零误差是难以消除的,但它很小[11,12],此外,控制系统的环境温度变化范围小。因此,所造成的霍尔传感器元件的固有误差可以忽略。然而,霍尔位置传感器的安装误差总是存在[13],因此三相霍尔位置传感器信号的电角差不总是120度,这对电动机旋转速度的测量精确度有很大的影响。如图5(a)中,虚线表示的理想的霍尔位置传感器信号和实线所表示的实际霍尔位置传感器信号的重叠部分是相同的。如果A和B相之间的差小于120度电角度,即使电机转速是稳定的,每一个方波的实际时间间隔不断波动。如图5(b)表示,与方波不再具有相同的时间间隔的对称信号,从上升沿到下降沿每个相邻间隔的经过时间的关系如下: (3)
因此,当使用AND方波或者从上升沿到下降沿经过时间来确定电机的旋转速度时会发生很大的误差。
假定霍尔元件的特性是一致的且电机的磁场分布是相对均匀。当电机的旋转速度是恒定的,“上升沿,下降沿,上升沿,下降沿”或“下降沿-上升沿-下降沿-上升沿” 期间所用的时间是一个固定值。它如图表图5(a)所以。这个值是每个阶段的时间霍尔信号在高或低水平电机旋转360度电角且等于旋转180度电角的时间间隔,因此,波形被称为半方波。它是由霍尔元件的特性和磁场的分布来确定。因此,信号通过外部中断服务程序,得到在每个低和高电平方波的时间上升和下降的边缘且读出芯片计数器值。然后将每次三个相邻间隔“上升沿,下降沿”和“下降沿,上升沿” 经过的时间相加获得:
(4)
因此通过计算三个连续中断的总和得到电机的旋转速度计数器值。所以,测量精度可以得到提高。电动机的磁极数为,完成一个旋转的时间为t,如下式所示:
(5)
该电机的旋转速度是可如下计算:
(6)
图5实际的三相霍尔位置传感器信号和方波:(a)实际霍尔位置传感器信号(b)实际的和方波
4.霍尔位置信号调节和处理
4.1霍尔信号调理电路的设计
作为主控制单元的大型16位单片机是ATMEL公司生产。使用单片机内部的上电复位电路、时钟电路连接外部晶体(7.3728MHZ) 和高频小电容器(22pF)。因而它可以改善的稳定性和系统的可靠性,使调试系统程序可方便使用[14]。
如图6(a)所示,三相霍尔位置传感器信号是由9012晶体管放大电路放大的,首先减少控制器抽样信号幅度的要求。电动机产生的霍尔位置传感器信号有两种相位差,如60度和的120度电角相位差。为了确保该速度测量系统有这两种霍尔位置传感器信号的相位差,两个的兼容性的信号信道通过扩增B相霍尔信号“mHall_60”和“mHall_120”。由于霍尔位置传感器信号采用120度相位差,信号“mHall_120”是通过74HC08与门输入,将“mHall_A1”,“m_Hall_C1”进行与运算,得到与运算的三个通道并将其传送到光纤耦合,从而电动机转速信号的一个通道 “和方波信号”产生,如的图6(b)所示。为了避免从芯片的影响,电动机转动速度的信号通过光电晶体管光耦合装置TLP521-1分离,如图6(c)所示。
4.2霍尔位置传感器信号的处理
霍尔位置传感器信号调节后,电机转速的连续脉冲之间所经过时间的测量可以使用AVR米加16位单片机通过中断服务程序来实现[15,16]。然而,电动机的转速信号中的噪声将引起测量误差;它需要利用数字滤波器和编程计数策略来降低测量误差。
4.2.1用单相霍尔位置传感器信号测量电机转速
传感器的模拟信号由噪声组成,它需要由信号采集系统进行过滤。目前数字滤波器被广泛用作滤波的编程方法。在信号处理中,数字滤波器是一个系统,该系统执行上采样,离散时间信号,从而减少或增强信号的某些方面的数学运算。相对于其他主要类型的电子滤波器,模拟滤波器,它是一种在连续时间模拟信号上进行操作的电子电路。对于在测量信号中加入白噪声,滑动平均(MA)滤波器是最佳有限脉冲响应(FIR)滤波器[17]。滑动平均滤波术是在数字信号处理过程中最常用的过滤器之一,即采用一个简单的过滤内核并降低噪音,同时保持主要信号的
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[146633],资料为PDF文档或Word文档,PDF文档可免费转换为Word



