超声波测距装置的研究外文翻译资料
2022-09-14 19:18:22

英语原文共 3 页,剩余内容已隐藏,支付完成后下载完整资料
超声波测距装置的研究
摘要
本文详细介绍了超声波测距系统及其设计汽车用超声波测距系统的基本原理。该系统包括下位机和上位机系统。下位机系统主要由超声波发射电路、接收电路、无线通信模块和微机组成。下位微机系统的数据通过无线方式传输到上位微机系统中。我们已经分析了超声波测距电路的设计原理,还介绍了数据传输的设计思想。该系统具有测量方便、响应速度快、稳定性好等特点。
关键词:无线通信;单片机;超声波;测温;温度补偿
1引言
在汽车和电子领域,超声波距离测量有助于汽车停车或倒车,且能增加这个过程的安全性,该设备主要是为汽车倒车而设计的,因为驾驶员的目测不能准确地判断物体和车体之间的距离。车辆倒车预警系统将为驾驶员提供倒车报警和距离,应用的实际意义包括以下几个方面[1]。
(1)它将引导自动倒车从被动防碰撞的方向转变成智能控制方向;
(2)它体现了以服务人为中心的思想,当倒车时,司机的注意力可以集中在车的前面而不用去考虑到汽车后的情况,增加倒车的安全性和可靠性,减少驾驶员的体力劳动和脑力劳动强度;
(3)安全可靠的防碰撞预警,因此无论是白天还是黑夜司机都可以实现安全驻车,大大提高了停车倒车过程中的安全系数;
(4)该程序是安装在一组组件上,以避免对汽车的影响,为它的应用和普及创造更优的经济条件,使其更容易传播。
车辆倒车预警系统的使用可以大大降低驾驶员的体力和精神消耗,因此不仅仅降低了倒车的难度,还进一步减少了因驾驶员精神不集中于方向而操作失误引起的交通事故。与此同时它将提高汽车智能的水平,更可以促进实现无人驾驶汽车的积极意义这一个终极目标。
2倒车预警系统的发展现状
倒车预警系统已经走过了三个阶段,倒车技术有六代的改进,从早期的只是只能测试一个车后限制范围内的障碍距离的子级报警碰撞装置,到前2个阶段时,倒车报警设备用简单的专用集成电路为基础,为了适应人们驾驶的需要而作出的缓解措施,使得单片机和汽车电子的价格随着网络的迅猛发展以及需求环境的变化而下降,致使此阶段产生的备份倒车预警系统是以单片机为核心的智能测距传感器系统。要求备份预警系统和障碍显示能从形成不同频率的连续和间歇语音报警排列,让司机注意并看到现场的情况。汽车电子系统的发展还要求网络的驾驶员辅助系统停车传感器子系统具有能将数据发送到车辆总线通信的功能。作为为智能视频停车传感器系统服务的最先进的备份预警系统,该系统在车后打了针孔车载摄像头,在倒车时车内的显示屏上可以显示车后实时广角图像。在最近上市的东风汽车有限公司乘用车公司的全新一代蓝鸟的智能方面,最引人注目的是,它是配备倒车影像显示系统和导航卫星导航系统,两者的配置在同一水平。这辆车已经相当独特,十分有效地提升了蓝鸟档次,这型汽车直接使得高端智能这一理念从理论概念达到了实际应用。当挂入倒车档时,在中心控制台上液晶屏幕会自动切换屏幕,汽车后面相机捕捉到的环境条件直截了当地显示在驾驶员的面前,能够最大限度的方便停车,这一功能在夜间尤其能显示出它的价值。而且在NAVI卫星导航系统允许下丰田,日产都争相效仿,日后也可以作为一个全球定位导航系统引进国内厂商。
3系统设计
3.1硬件设计
可视倒车预警系统可实现车辆后方的车尾与障碍物的距离测量。测距系统硬件设计,包括超声波收发系统,微处理机控制系统设计与报警系统。其中,测距系统包括超声波发射模块和超声波接收模块;控制系统主要由AT89C51单片机系统设计;显示报警系统主要是包括数据通信、数据转换、蜂鸣器和静态显示电路设计。
硬件结构如图1所示。
图1系统硬件框图
3.2定位系统
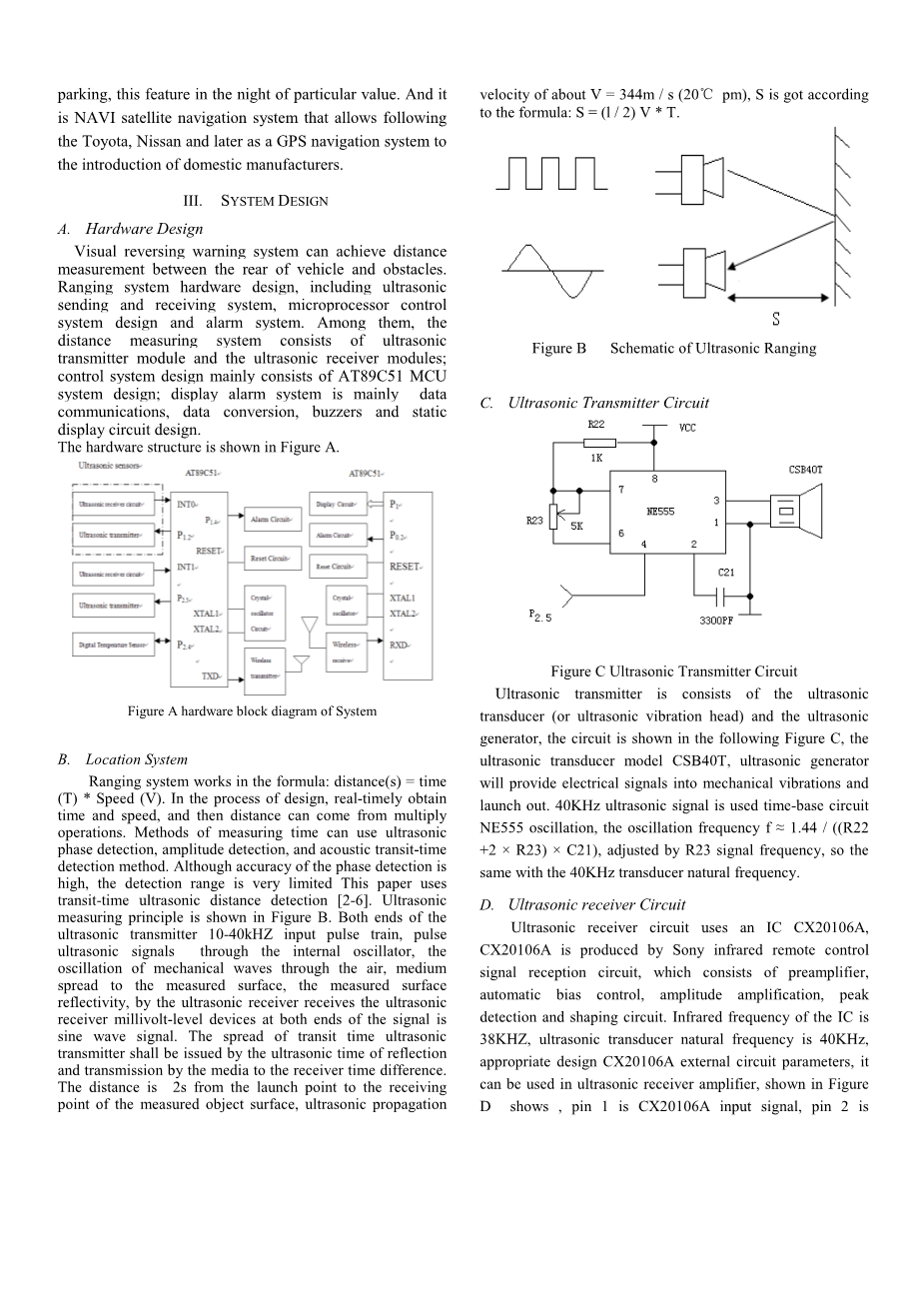
测距系统的工程公式:距离(s)=时间(T)*速度(V)。在设计过程中,实时获取时间和速度,然后距离可以来自乘法操作。测量时间的方法可以使用超声波相位检测,幅度检测,声波时差检测方法。虽然相位检测的精度很高,但是检测范围是非常有限的。本文使用时差法超声波测距[2-6]。超声波测量原理如图2所示。两输入端超声波发射10-40khz脉冲序列,脉冲超声波信号通过内部振荡器,在空气中振动的机械波,匀速地通过介质表面,表面的反射率可以测得,由超声波接收器接收到的在毫伏级接收机设备两端的超声波信号是正弦波信号。超声波发射器发出的超声波传输的时间可以由超声波反射时间和介质到接收器的传输时间差决定。从发射点到接收测量物体表面的点的距离是2S,超声波在空气中的传播速度V = 344m / s(20℃pm),对下公式S是已知的:S=(1/ 2)V*T.
图2超声波测距原理图
3.3超声波发射电路
图3超声波发射电路
超声波发射器是由超声波换能器(或超声波振动头)和超声波发生器,电路如图3所示,超声换能器模型CSB40T,超声波发生器将电信号转换成机械振动并发射出去。40KHz的超声波信号用时基电路NE555振荡,振荡频率fasymp;1.44 /((R22 2times;R23)times;C21),通过R23信号频率的调整,所以和40kHz换能器的固有频率相同。
3.4超声波接收电路
超声波接收电路采用集成电路CX20106A, CX20106A是索尼制作的红外遥控信号接收电路,由前置放大器,自动偏置控制,振幅放大,峰值检测与整形电路构成。集成电路的红外频率是38KHz,超声换能器的固有频率为40KHz,适当设计CX20106A外部电路参数,它可用于超声波接收器放大器,如图4所示,引脚1是CX20106A输入信号,2脚是CX20106A RC网络连接端,引脚3为CX20106A探测器电容连接端,引脚4为CX20106A接地端,引脚5 CX20106A通过滤器中心设置引脚6连接CX20106A集成电容器的一段,引脚7 CX20106A信号输出,引脚8 CX20106A电源侧。
图4超声接收电路
3.5报警电路设计
系统中输出电路带有的蜂鸣器作为报警声音,当距离不到0.35米时,蜂鸣器将发出间隔频率1Hz的哔哔的声音。电路设计如图5所示,图中的有源蜂鸣器电路中的蜂鸣器主要由多谐振荡器、压电式蜂鸣器,和谐振器的阻抗匹配装置,发光二极管组成。当接通电源后(1.5~15V直流工作电压),多谐振荡器启动,输出1.5~2.5KHz音频信号,阻抗匹配器使得压电式蜂鸣器发声。蜂鸣器电路由单片机RD边控制。由单片机控制的警示灯触发脉冲信号系统,在当距离小于0.6米时发出明亮的灯光。电路的目的是显示实时距离测量的结果。我们使用一些有读和写功能的16 * 2字符液晶模块LCM1602模型,其操作屏幕和光标是可以通过编程指令实现的,这表明,其显示内容丰富,美观,编程灵活,与单片机的接口设计比较多而且简单方便。单片机将需要显示的数据发送到相关显示界面以完成显示工作,这是一个简单,方便,节省时间的单芯片,且能确保主程序的正常运行。
图5有源蜂鸣器电路
四、总结
用于测量距离的超声波传感器,重要的是要确保电路必须满足电路的可靠性和稳定性;设备的实际测试符合设计规范,具有测量精确,报警时间,灵敏度高的优势;实际设备避免事故的发生,应用价值高。由于超声波传播速度较慢,传输延迟,影响报警系统的响应速度,因此只有在车辆低速能够有效使用,应用在高速车辆上需要改进。
参考文献
[1]H.Elmer;H.Schweinzer,G.Magerl.High resolution Supersonic distance measurement for long distances Technisches Messen[J].2003,70(4)
[2]E.Francis Gueuning,Mihai Varlan,Christian E.Eugene,etal.Accurate distance measurement by an autonomous ultrasonic system combining time-of-flight and phase-shift methods. IEEE Transaction on Instrumentation and Measurement,1997,46(6):1236~1240.
[3] H. Peremans, Broad beamwidth ultrasonic transducers for tri-auralperception, J. Acoust. Soc. Amer. 102 (3) (1997) 1567.
[4]R.Ka_zys, Smart ultrasonic sensor for semi-autonomous robots,Mechatronicsrsquo;98, Proceedings of the 6th UK Mechatronics International Conference, Skovde, Sweden, Pergamon, Amsterdam-Tokyo, 1998, p. 489.
[5] R. Ka_zys, L. Svilainis, L. Ma_zeika, Application of orthogonalultrasonic signals and binaural processing for imaging of the environment.Ultrasonics 38 (1–8) (2000) 171.
[6] 周凯,赵旺达,赵狄。高精密超声波测距系统。测试技术。2007
基于MCS-51单片机的电梯系统与控制的实现
马武兴,何佳宁,张伟,高勇,张超
机械与电气工程学院
昆明理工大学
昆明650093
amawuxing@126.com,bhjning@126.com
摘要
电梯是一种为使生活便利的设备,在人们的日常生活中有着广泛的应用。为了满足电梯的快速发展,本文中的控制系统是以MCS-51单片机为基础的。此外,使用51单片机还可以用来形成特殊的控制系统和确定相关程序。然后,不仅减少了成本,也加强了隐私和提高了可靠性。远程控制可以通过微处理机控制实现,是电梯的核心系统,而且还影响着电梯的基本性质,例如安全性、舒适性和操作的精确度。
关键词:51单片机;电梯;控制;系统
1引言
MCS-51具有如下优点,如开发环境要求底,软件资源很丰富,短距离数据传输,高可靠性,响应时间短和服务速度快速。总体布局与功能组件的结构比较合理,抗干扰能力增强,操作比较稳定。因此,单片机是控制系统最理想的选择。单片机是一种典型的嵌入式系统,因此它是低端设备的最佳控制系统。MCS-51单片机是用来开发与实现电梯的运动,因此,其包括一个控制系统的人机交换功能。而且,MCS-51系列8031单片机采用系列开发控制系统。汇编语言是用来进行单片机外围电路、系统扩展、运行状态显示和远程控制的开发。
2电梯控制系统的工作原理[1]
电梯控制系统的工作原理是:当呼叫信号输入时,系统被锁定。直到它是被单片机查询,操作方向不会根据呼叫信号和电梯的位置决定。然后,电梯被激活到达呼叫信号层停止并且打开电梯门。在乘客进入进入电梯后,电梯门关闭,乘客被送到所要去的目的层。
3电梯的电气系统[2,3]
电梯电气系统由电梯的电力驱动与信号控制组成的。电气系统是根据人的需要改变推动力的,可以执行需要的功能,如指令,开始,加速度和运动,平滑层的速度变化,开关门等。上述功能需要依靠驱动设备与控制系统。电气控制系统是由超过十个组成部分,如控制柜操纵箱、内阁操纵箱、呼叫箱,抑制装置,平滑层,变速器设备等。此外,它包括超过十种电子元件如电动拖动电机、开关门,调速开关,限位开关等,这是分散安装在电梯的每个相对部件。如图所示,这是电气系统图。
1 -远程控制;2 -指示信号电路; 3 -电梯位置监测和显示电路; 4单片机;5安全控制电路; 6 -逻辑运算电路;7 -开关闸
图1电气系统图
4电梯控制系统的硬件设计
如图2所示,这是基于单片机的实现电梯控制系统的结构原理框图。
1 电机;2二级齿轮减速器;3光电编码盘;4速度反馈信号;5平流装置;6层楼指示器;7配重;8呼叫箱;9内操作箱;10电梯;11称重装置;12速度曲线产生装置;13主控微机
图2电梯系统图
由于MCS-51具有良好的发展环境和汇编语言编程设计方便的前提条件,所以采用MCS-51系列的8031单片机。I/O端口,中断系统和定时/计数器都被充分利用来建立电梯运行控制、逻辑判断和检测以及监控。而且,TXD和RXD MSCOMM模块用来实现远程控制。
4.1利用并行口扩展键盘[4]
扩展键盘的使用的并行端口包括2个形状:
一种是矩阵键盘,它是所谓的行列式键盘。柱线连接到正5V电源同时提供低功率电平给行线。如果一些键被按下,然后对应的行可以接收低电平功率及可判断相关值。矩阵键盘比较普通键盘的有点是可以节省输入/输出系统的端口。
另一种是串行扩展键盘,每一个按钮和一个相应的I/O端口匹配。按钮的一端连接到高电平电源,按钮的另一端连接低电平电源。但是,I/O口一般连接到高电平电源。当按钮被按下时,相应的I/O端口导入低电平同时相关值就可以判断。显然,串行扩展键盘占
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[148134],资料为PDF文档或Word文档,PDF文档可免费转换为Word



