基于功率分流混合动力电动汽车高效率综合配电的优化外文翻译资料
2022-09-20 10:25:34
基于功率分流混合动力电动汽车高效率综合配电的优化
摘要:现在配电的优化策略研究广泛,而大多数人的重点在行驶周期预知的前提下燃料消耗最经济。因此,如果实际行驶状态偏离预定行驶周期,优化结果将大大下降。本文在即时在线优化策略方面进行了研究。基于一个特殊的功率分流方案分析其功率分流路径和传动效率并以此建立功率传输组件的有效模型。综合效率优化模型的建立旨在提高传输效率和燃油经济性。作为研究目标,综合效率优化的识别和约束组将着重讨论。基于自适应模拟退火(ASA)算法和实时在线的径向基函数(RBF)的模型进行优化计算。在实际行驶条件下混合动力汽车的优化功率分布的实现,以及相应道路试验结果将在文中给出。测试结果表明,综合效率优化方法可以显著提高传输效率和功率分流混合电动汽车(HEV)的燃油经济性。相对于基于规则的策略,本文的优化策略是最优的,能实现近似全局优化配电解决方案。基于自适应模拟退火(ASA)算法的综合效率优化可以同时关注优化质量和计算效率,因此在功率分流混合电动汽车(HEV)具有良好的应用前景。
关键词:混合动力汽车、功率分流,综合高效率的优化、配电、道路测试
1前言
混合动力电动汽车有多个能量来源,如燃料,电池,发电机提供能量。多能量源之间的功率分配是提高燃油经济性、动态性能和可靠性的关键技术。在功率分流混合动力系统中,功率耦合,受到功率分流机械以及组件参数的限制。因此很难实现最优功率分布的结果。建立优化模型和匹配优化算法[1]的主要问题。最近,关于混合动力汽车的能量管理和配电的研究深入展开,大多数已经实施的控制策略属于类启发式规则的控制器。这些策略有可管理的复杂性,需要低的计算资源。但是他们有一个有限的适应性,通过改变阈值间接改变控制器规则来实现次优化结果。从配电的质量的角度,有利的策略优化结果是基于驱动周期的识别,尤其是全局优化。
FISH,在参考文献[2]中,联合确定的优化方法,序列二次规划(SQP),是为了分析控制参数优化,可以有局部最优结果,而全局不可以通过这个方法得到。WIPKE,在参考文献[3],应用直接搜索法优化SUV的电源管理。这个方法比SQP更高效,但它并不适合大规模计算和收敛速度很低。为了提高优化效率,引入了随机搜索。DELPRAT,在参考文献[4],利用基因算法得到了很好的优化结果。密歇根大学的PENG, 在参考文献[5]中,区分几个特定条件下的优化和使用随机动态规划优化配电。其优化效率和效果更好。普雷斯顿大学的KUTTER,在参考文献[6]提出了等效燃油消耗最小化策略(ECMS),在驾驶周期需要已知或车辆速度已知的前提下,通过预测动态规划解决全局最优控制。XIONG,在参考文献[7],基于中国城际运输巴士驾驶周期使用实值遗传算法用于串并联混合动力汽车控制策略。ZHANG,在参考文献[8],研究多目标优化遗传算法的控制策略。大多数这些策略目标是最佳燃油经济性而且驾驶周期必须已知。如果实际行驶条件偏离预定行驶周期、优化结果将大大下降的影响。然而, 研究混合电动汽车(HEV)功率分流(并串联)要少得多,功率分流方案和控制的研究则不是很充分。MORTEZA,在参考文献[9],在并行混合动力汽车应用遗传算法优化的控制策略。HASANZADEH,在参考文献[10],为串联混合动力汽车设计了优化控制策略。XU,在参考文献[11],针对混合燃料电池动力系统使用多目标遗传优化算法。SHI,在参考文献[12],针对燃料电池电动汽车研究瞬时优化能量管理策略,建立了瞬时油耗功能和电池能量转化为燃料电池发动机的燃料消耗系统。
因此适合重型车辆的要求高功率和速度范围宽的功率分流混合电动汽车配电的瞬时优化策略在本文中进行了研究。首先,分析了功率分流方案和传输路径。然后是综合效率的识别和计算方法进行了较为详细的试验研究。提出了高综合效率的优化模型和算法。最后提出了道路试验结果和基于综合效率的优化策略验证。
2功率分流路径及其效率
2.1功率分流方案
混合电动汽车有几种功率分流,比如机械功率与电力功率。混合动力系统包括发动机、电动机A,电机B,功率耦合机械、行星齿轮箱,控制组件。混合电动汽车方案如图 Fig. 1.
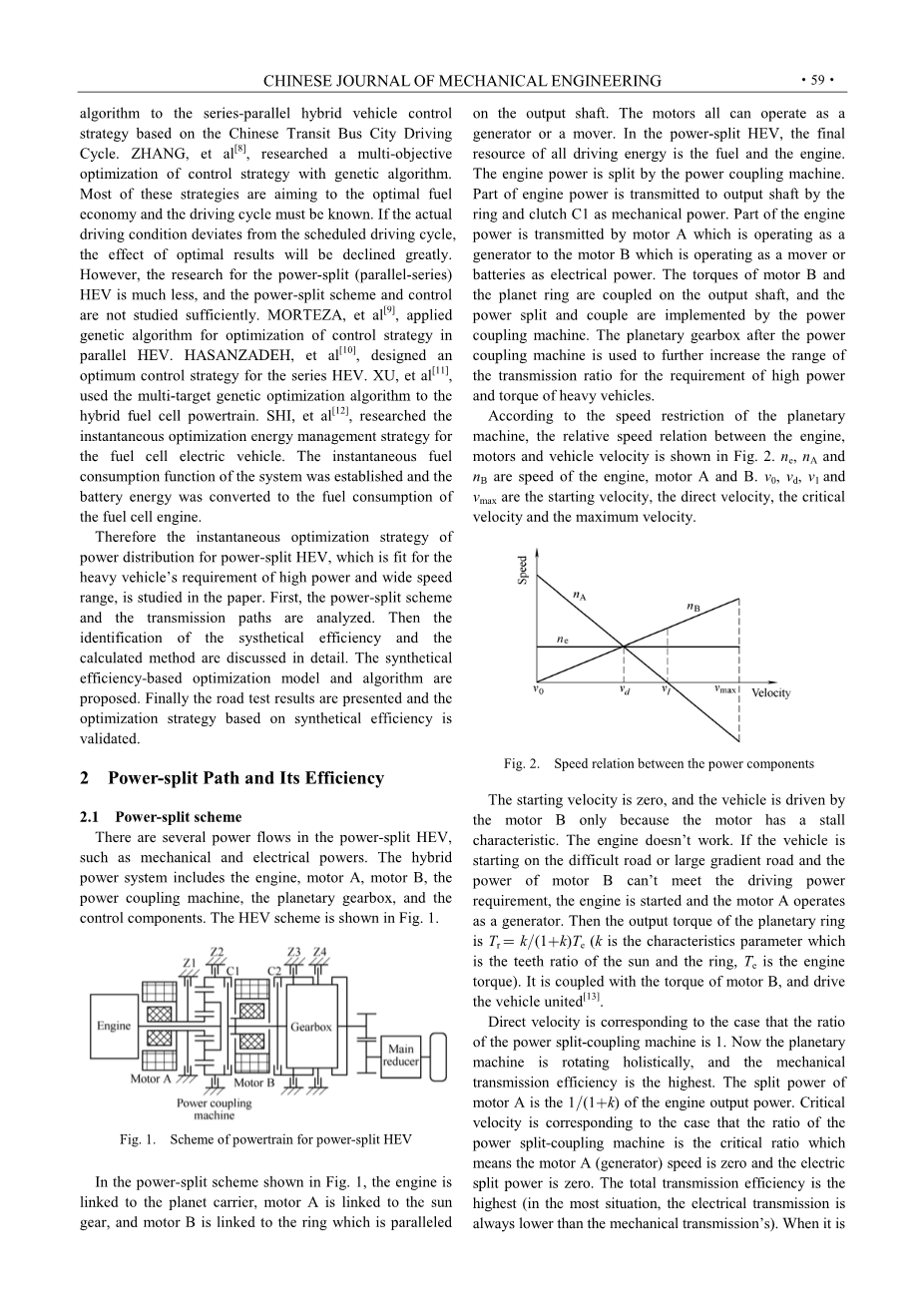
功率分流混合电动汽车的动力系统的功率分流方案图fig.1所示,引擎连接行星架、电动机A连接太阳齿轮,电机B与输出轴平行的环。汽车都可以作为一个发电机或电动机。功率分流混合电动汽车中,最终所有驱动能量的能源是燃料和发动机。发动机功率与功率耦合机器分离。发动机功率的一部分传递给输出轴离合器C1作为机械功率。部分发动机功率传输给电机A,A作为一个电机B的发电机,电机B作为一个电动机或电池电源。B电机的扭矩和行星环耦合在输出轴上,功率分离的耦合的实现通过功率耦合机械。功率耦合后的行星齿轮箱机是用于进一步增加传动比范围在要求高功率和扭矩的重型车辆上。根据行星机的速度限制,引擎,汽车速度相对速度之间的关系是图fig.2所示。
,和分别是引擎速度,电动机A和B的速度, ,,和分别是起始速度,直接速度、临界速度和最大速度。
初始速度为零,车辆通过电机B驱动只是因为电机失速特性。发动机不工作。如果车辆行驶在艰难的路或大坡度路和电机功率B不能满足驱动功率要求,发动机启动,电机A作为发电机运行。行星环的输出扭矩Tr=k/(1 k)Te(k是特征参数,行星齿轮比,Te是发动机扭矩)。加上B电机的转矩,联合驱动汽车[13]。直接速度对应的功率的比值是1。现在行星机整体旋转,机械传动效率是最高的。电动机A的分离功率是发动机输出功率的1/(1 k)。临界转速对应功率分离耦合机械的比,代表电机A与电动分离功率均为0。总传动效率最高(在大多数情况下,电力传输总是低于机械传动的)。当它在最高速度,电机A反转避免发动机转速过高。
2.2功率分流路径的效率
基于功率分流方案,混合电动汽车的主要方式如下:电动驱动,仅有发动机驱动,引擎驱动和发电,混合动力驱动,制动相结合,扭转和停车发电模式[14]。为确保辅助系统的电力消耗,避免由于电动机的速度过零带来的不稳定,控制策略中应尽量避免电动机A的低速和相对旋转。主要模式和组件状态如表1所示。
(1)电动驾驶和反向模式。
在电力驱动模式下,电池是唯一的能源资源和车辆由电机B驱动。反转模式是类似的,电机B反转即可。在这种模式下,传输效率是由电池放电,电机,齿轮箱和后方驱动车轮的变速箱的效率共同决定。电动驾驶和反向模式电力功率流向如图3所示。
(2)混合动力驱动方式。
在发动机启动时,电动机B可能处于三种状态:电动机/发电机/停止,同时电池可以处于充电,放电或停止状态。为确保辅助系统和其他电子系统(如主动式悬吊系统)供电正常,电机A始终是一个发电机。为确保电机A不因为匹配B发动机和发动机的速度而反转,电机A的发电状态一直持续。如果车辆负载很轻,电机A不工作,驱动功率全部是机械功率,属于引擎功率的一部分。但在这篇文章中,为便于讨论工作模式,所有利用引擎驱动车辆的工作模式被定义为混合模式。在这种模式下,机械传动效率是由发动机,功率耦合机械、变速箱和后方变速箱的效率共同决定。电力传输效率是由电机A,电机B、电池、变速箱和后方变速箱的效率共同决定。混合模式的功率流向是图4所示。
(3)联合制动模式。
当车辆制动,电机B作为发电机,制动转矩应用于驱动车轮。发动机处于空闲或停止状态。电机A处于停止状态。功率流向与电动驱动模式下的情况相反。传输效率是由传输到后方车轮的效率,电机B和电池充电的效率共同决定。联合制动模式下电力功率流向如图5所示。
(4)停车发电模式。
发电是混合动力汽车的一个特殊功能。当车辆停车时,它能补充电池能量作为必要的后备能量。基于速度和转矩的耦合关系,在这种模式下,电机A和B都可以作为一台发电机。其效率是由发动机,电机A和B,和电池充电的效率共同决定。
停车发电模式下功率流向如图6所示
3综合和组件效率
3.1综合效率的识别
混合电动汽车的综合功率的识别是由实际的驱动功率比上燃料燃烧释放功率得到的。混合动力汽车(HEV)有两种能源:燃料与电池,组件包括发动机和电机。在传输过程中,功率流向处于分离或耦合两种状态,能量交替十分复杂的。计算多功率流和电池能量的等效燃油消耗效率的方法以及其他电能是综合效率计算的关键。综合效率由下式得到:
eta;syn是综合效率;Pout是驱动功率的有效输出;Pfuel是燃料燃烧释放功率;Pfuel_eq是由等效燃油消耗的电池能量。在混合动力汽车的混合动力驱动方式,输出功率可以一致地表为:
Pout是驱动系统的有效输出功率;eta;c_r是从负载到行星齿轮环的传递效率;eta;c_s从负载到行星齿轮中心的传递效率;eta;A电机A的效率;PBatt是电池功率;PAux是估计的辅助系统的消耗功率;eta;B电机B的效率;eta;gb行星变速箱的效率;eta;r后方传输器的效率。
行星变速器的传输效率随传输效率变化,直接计算其效率也是困难的,因此通过计算损耗功率来得到传输效率。有效输出功率进一步表示为:
P c_s_loss是从负载到行星变速器中心的损耗;P c_r_loss是从负载到行星变速器环的损耗。损耗功率的计算将在稍后讨论。燃料发动机的输出功率为:
Pe是引擎的实际输出功率,eta;e是发动机的效率。
电池能量来自发电机A,B。在驱动过程中,电机A一直作为发电机。在部分情况下,一部分生成的电力用于充电电池。电动机B大多数时候是作为一个电动机。当驱动负载很低或车辆制动时,电机B作为一个发电机工作。
电动机B是回馈制动电机。因此电能来源于三个部分:车辆驱动时电机A的发电,驱动轻负载时电机B的发电,制动时电机B的发电。在驾驶过程中,电能的消耗需等效为燃料燃烧消耗,其等效传输路径是不同的。相对产生给电池充电的能量和电机的回馈制动能量相当于增加了燃料。所以等效燃油消耗功率表示为
电池充电和放电的平均效率被认为是相同的。当电机B是作为一个电动机,电机B功率为正,Q1计算为:
当电机B是作为一个发电机,Q2计算为:
当W当电机B作为一个发电机,其功率为负,Q1 Q2计算为:
Pfuel_eq是电池能量的等效燃料消耗;Q1是电机A在混合驱动模式下储存的发电;Q2是电机B在混合驱动模式下储存的发电;Q3是电机B在回馈制动模式下储存的发电。在一个长周期中,最初的从外部充电设备充进的电池能量可以忽略,可以认为所有的电池能量来源于电机A和B充电。/eta;A是电机A平均发电的效率;/eta;B是电机B平均发电的效率;/eta;c_s是从负载到行星变速器中心的平均传输效率;/eta;c_r是从负载到行星变速器环的平均传输效率;/eta;e是发动机的平均效率;/eta;Batt电池平均效率;eta;Batt电池效率;x(k)是在样本时间变量值k和x代表TA,TB,nA,nB,PAux和eta;Batt。
因为充电的电池充电是一个整体过程,汽车,电池和引擎的平均效率都需要进行等值计算。除此以外在式(5)中计算Q1和Q2当电池放电。如果电池是充电,Q1和Q2的值必须被认为是负的。
3.2引擎效率的识别
引擎效率定义为实际输出功率和由燃料燃烧产生功率的比值。通过引擎的燃料消耗率来计算燃料产生功率。油耗率图7所示。发动机效率可以从查找表得到。
3.3电动机效率的识别
电动机A,B的效率测试结果如下,根据电机的转速和转矩,可以得到其效率。测试效率图8和图9所示。
3.4电池效率的识别
内部阻力,功率,电池的开路电压等等都将影响电池效率。一个经验方程描述这些因素如下:
RBatt是电池的内部电阻,受到温度,电荷状态(SOC)和电流的影响。EBatt是电池开路电压,是内部阻抗,电荷状态(SOC)和电流的函数。
3.5行星变速器的效率识别
行星变速器的的功率损耗由相关功率方法计算得到。行星齿轮机器的运动包括两个部分:一个是传动运动,另一个是转动运动。传输功率分别称为传动功率及转动功率。假定传动运动的功率损耗和润滑将被忽略。转动运动的功率损耗在相同的固定轴齿轮上。假设内齿轮的传动效率是eta;in,外部齿轮的传动效率是eta;ex。一般来说,eta;in=0.98 , eta;ex=0.97。功率分流混合电动汽车,发动机功率输入行星机的载体,分别流向太阳齿轮和行星齿轮。所以转动功率分别流向太阳齿轮和行星齿轮。太阳齿轮的转速和转矩等于电机A的转速和转矩,所以太阳齿轮的转动功率表示为
Nc是行星齿轮的速度,与发动机转速成正比。
行星齿轮转矩等于从发动机转矩流向环的转矩,环的速度等于电动机B的速度,行星环转动功率表示为:
太阳和行星齿轮是网状的外部,所以太阳齿轮的功率损耗传输路径表示为:
环和行星齿轮内部
剩余内容已隐藏,支付完成后下载完整资料

英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[148336],资料为PDF文档或Word文档,PDF文档可免费转换为Word



