基于DSP的自适应反向步进使用跟踪误差高性能传感器的感应电机驱动的速度控制外文翻译资料
2022-09-23 16:53:11
英语原文共 15 页,剩余内容已隐藏,支付完成后下载完整资料
基于DSP的自适应反向步进使用跟踪误差高性能传感器的感应电机驱动的速度控制
摘要
本文提出配备了自适应反向步进速度观测器的感应电机(IM)的反向步进非线性控制的改良结构。该控制设计是基于通过引入积分跟踪误差动作补充反向步进技术,以提高其鲁棒性。不像其他的研究进行反向步进积分作用的控制,在本文中开发的控制规则并没有提出系统状态的数量的增加,从而不加大微分方程分辨率的复杂性。数字仿真和实验结果表明,相比于常规的PI控制本文所推荐的的控制具有高效性。该结果分析表明,对负载的扰动自适应控制,速度变化和低速有着特有的鲁棒性。
1.介绍
较于其它类型的电机,感应电动机具有许多优点比如高效率,高速度和寿命。这些优势和电力电子技术领域和喜好处理的发展允许感应电动机在最困难的环境中工作,并具有较低的维护成本[1,2]。在需要精确的动态变速应用中,不管有不同类型的干扰和参数不确定性,传统线性控制器如PI和PID难以对非线性问题进行调整。在这种情况下,性能可以通过非线性控制技术来改善。近年来,非线性系统的控制进展迅速。尤其是一些精确线性化技术已被应用到异步电机的控制。这些技术所需要的的系统参数的知识,这并非一般情况下电子设备[3,4]。为了改善朝向参数变化的控制的鲁棒性,尤其是转子电阻控制,许多研究已经提出了非线性控制法则和非线性速度观测。其中,滑动模式控制和反向步进控制,滑动模式技术
施加到感应电机,但这种类型的控制的主要缺点是增益调整,即使最大值可以从不确定因素上限被配制[5],和振铃现象外观[6,7]。其他研究使用反向步进法的控制设计和转子速度估计。
反步法最近出现使控制法的设计和电机参数的估计有规则可循[8,9]。在文献[10]中,作者提出了一种新的控制方案,使用感应电动机的一种新颖的动态模型,基于与电机未知经典反步控制惯性,阻尼系数,负荷转矩和与出施加在所进行的试验的负载转矩的转子电阻的不确定性。然而,对比研究中[11]表明,这种类型的控制的呈现高带宽的速度信号,该信号是不靠近基准速度,和不保证扰动(负载扭矩)的总抑制。在[11,12],作者提出的一个由控制和利用反推自适应观测技术组成的完整版本。得到的结果显示了控制律和观测的良好表现,但值得说明的是,这种方法的问题是求解微分方程的复杂性:因为该模型将增加两个状态,这需要给处理器更多的计算时间。另外,我们可以注意到,试验不像在[13]提出的,而是工作在低速进行约8%的额定转速,作者验证Z型观测以额定速度的小于1%的速度进行。
其他研究人员使用基于模糊逻辑或神经网络[14-16]控制策略和观察。工作已经呈现出基于混合等结构,例如模糊逻辑与滑模或模型参考自适应控制(模型参考自适应系统)[17-19],并与滑模[20,21]的反推的完美组合。
相较于[11,13],本文的主题是为三相异步电动机允许高的静态和动态性能提出了工程设计一个简单的控制律。这种技术是基于步方法,该方法建立连续的关系,建立系统的迭代和强大的控制规律,根据Lyapunov稳定性理论[22]渐近稳定。可以通过在控制和速度观测器的设计中的每一步添加跟踪误差的积分动作会显著减少某些参数和负荷扰动的变化的影响,而不会像呈现在[11,13]的作品另两种状态提高感应电动机的状态模型。这种技术将确保高精确度
控制面对面的人参数不确定性,并在瞬态和稳态低速估计。该传感器速度控制是通过Matlab的Simulink的(R2011b7.13.0.564)环境,并根据实时数据采集控制系统dSPACE的DS1104卡的实验验证。使用跟踪误差的积分动作反推控制相比,使用PI控制器,表明该算法的有效性经典控制。
- IM状态空间模型
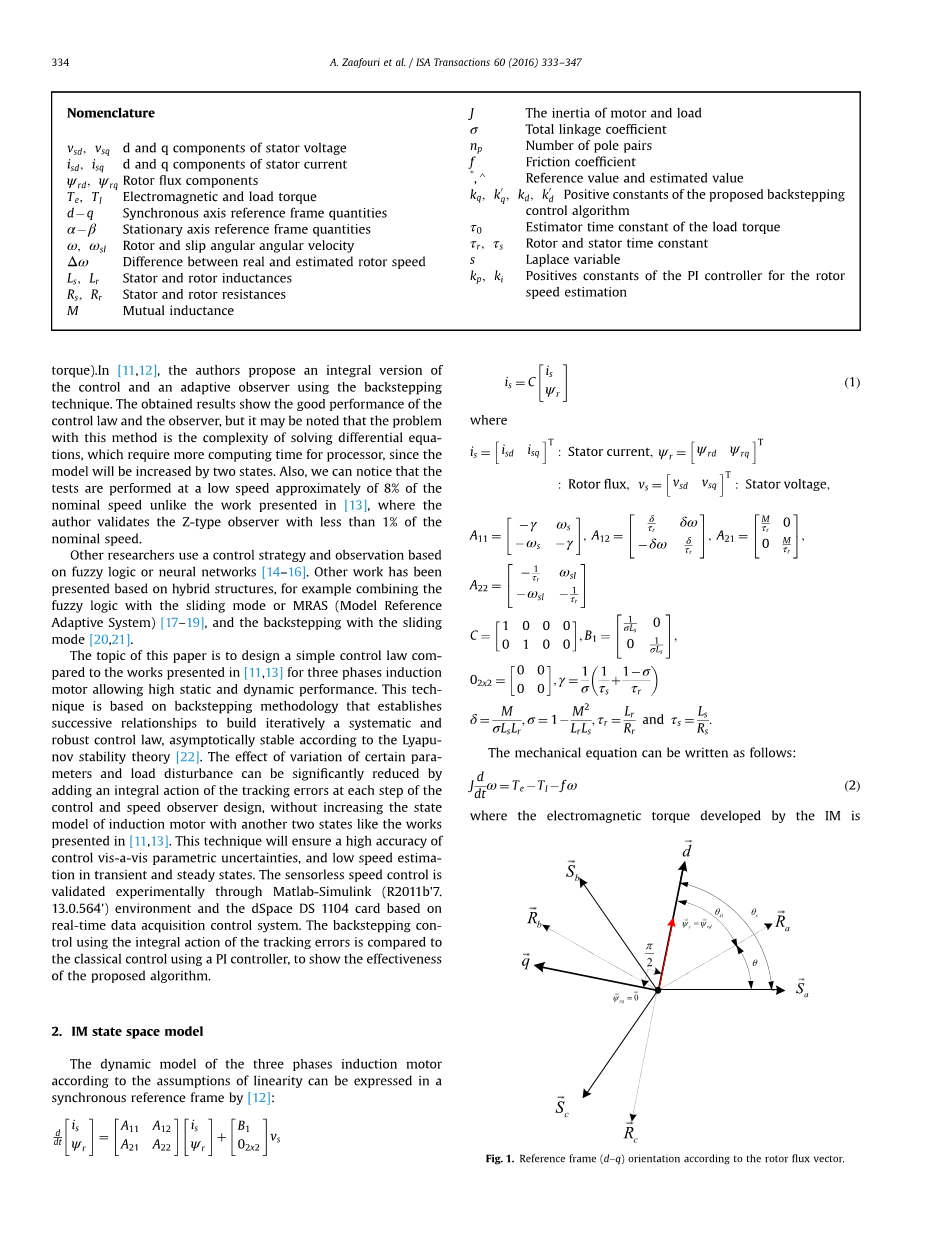
根据线性的假设的三相感应电动机的动态模型,可以在同步参考帧由被表达[12]:
(1)
:定子电流;:转子磁链;:定子电压;
,,,
,
,
,,和
机械式可写为如下:
(2)
其中,由IM开发的电磁转矩表达为 (3)
- 在IM的磁场定向控制
该磁场定向控制(FOC)是在工业领域最常用的策略。其目的是改善异步机器的不同标量控制的静态和动态的行为。它允许解耦电磁量以使与DC机器控制类似。如图1所示,FOC的原理是与所需的磁通对齐所述旋转坐标(D 2 Q(D-Q))的d轴。因此,通量将由定子电流和由二次组分的转矩的直接分量进行控制。在这种情况下,我们得到:
(4)
用公式(1)和(4),新模式电机力度通过下面的空间矢量微分方程描述:
(5)
电磁转矩和转差频率的新的表达方式由下式给出:
(6)
(7)
- 使用整体跟踪误差的反推控制设计
在这里,我们在反步控制技术引入修改合成IM的控制向量类型。
作为轨迹跟踪的一部分,反推控制的基本思想是使系统相当于一个级联第一顺序子系统,给它的强度性质,并通过渐近跟踪误差的所有稳定性。每个子系统的稳定性和性能是利用Lyapunov理论[1,2]研究。
反步法技术是合成非线性控制律系统和递归方法。所以在设计的每一个步骤,产生一个虚拟命令,以确保一阶子系统的收敛到其平衡状态。尽管缺乏一定的系统参数和一些干扰[20]的知识,这种技术可以让强大的控制律得到综合。在这里,我们通过在控制设计引入的跟踪误差的积分项提高该技术的稳定性。
图1根据所述转子通量矢量参考帧的(d-q)的方向
图2.和虚拟输入
图3.波兰本地化转移矩阵H(S)为rho;1=0.5,rho;2=0.6和^omega;=027314弧度/秒
图4.波兰人本地化转移矩阵H(S)为rho;1=0.5,rho;2=0.29和omega;=027314弧度/秒
图5.使用基于跟踪误差反步法技术速度观测矢量磁场定向控制驱动整体方案。
图6.仿真结果与速度参考资料1(第一次测试)
4.1.速度和磁通环
解决跟踪速度和磁通的问题,我们定义下面的跟踪误差为:
(8)
(9)
虚拟输入和是用来保证速度和磁通环路的稳定性。跟踪误差的动力学是由下式给出:
(10)
(11)
让我们看看下面的候选Lyapunov函数,其派生是由下式给出:
(1 2)
其中。根据反步法,并且为了确保跟踪速度和通量的稳定性,虚拟控制和被选择如下:
(13)
(14)
该方程(13)和(14)可以被总结如(图2)
图7.仿真结果与速度参考资料1(第二次测试)
图8.仿真结果与速度参考轮廓2(第三个测试)
4.2 定子电流回路
要计算整个系统的控制律,我们定义在定子电流误差如下:
(15)
(16)
候选Lyapunov函数方程有关的等式(5)被选择如下:
(17)
公式的时间导数 (17)写为如下:
(18)
从式(5),并通过选择控制律和如下:
(19)
(20)
4.3.控制预估
为了适用反推可使用控制感应电动机,做两个估计。第一个测验来估计沿d轴转子磁通量;第二是估计负载转矩。这些估计量的表达式由下面的等式[12]给出:
(21,22)
其中tau;0是估计的时间常数
图9.模拟结果与速度参考资料1(第一个测试)
图10.仿真结果与速度参考资料1(第二个测试)
5.使用跟踪误差的积分反步法的速度观察
本文的第二个目标是综合鲁棒控制无速度传感器,假设速度和流量是无法进行测量。
使用具有跟踪误差(在文献4呈现),用于在连接到转子速度被认为是附加的参数估计的定子(alpha;-beta;)的参考自适应观测方程的积分作用反推的技术如下:
(23)
(24)
(25)
(26)
其中,chi;1和chi;2为要设计的控制输入。
状态误差方程定义如下:
(27)
观测器控制的输入项将被反步法概念定义,以便估计感应电机的转子速度来预估。考虑到后者的所有参数是恒定的,其结果是状态误差的动态是:
(28)
(29)
(30)
(31)
其中
跟踪速度问题的解决是基于使用一个非线性控制器的反步算法。分辨率方法的第一阶段是设计稳定使用和作为用于非线性控制器[9]虚拟输入定子电流预测误差的积分功能。
考虑到上述情况,定子电流的预测误差的积分被选择如下[13]:
(32)
我们定义的偏差εalpha;和跟踪预测当前错误εbeta;,知稳定功能是通过theta;alpha;和theta;beta;:
(33)
稳定功能的选择应满足李亚普诺夫条件,剃度观察者动力学指数收敛。这些函数定义如下[14]:
(34)
其中,rho;1的选择,以保证观测的渐近稳定的积极不变。
通过替换式(34)代入式(33),所述偏差的新的表达和跟踪预测电流误差的是:
(35)
(35)式的派生使用公式计算。(28)和(29),得到:
(36)
(37)
控制输入chi;1和chi;2进行选择,以保证观测的渐近稳定性。这些控制输入被给定
(38)
(39)
图11.仿真结果与速度参考轮廓2(第三个测试)
图12.实验测试配置
图13.中实验测试台架视图。
5.1.转子速度和稳定性分析的自适应律
设计观测器和参数适应法的最后一步是定义其定义如下的适当Lyapunov函数:
(40)
应用了式(30)至式(32)、(36)和(37),式(40)可用如下表示:
(41)
由Lyapunov函数式的导数(40)必须定义负,估计转子速度自适应律可以通
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[148105],资料为PDF文档或Word文档,PDF文档可免费转换为Word



