基于逆变器的新型电压电流双闭环控制方法及外文翻译资料
2022-10-22 16:41:53
英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
基于逆变器的新型电压电流双闭环控制方法及
负荷在线参数估计
Ming-lei Zhu1, Rong-xiang Zhao1*, Zhuo-jian Cai1, Chen-hong Ni2, Jing Wu3
1 Department of Electrical and Electronic Engineering, Zhejiang University, Hangzhou, China
2 Department of Electromechanical Engineering, China Jiliang University, Hangzhou, China
3 Hangzhou Electric Power Bureau, Hangzhou, China
E-mail: rongxiang@zju.edu.cn
摘要:DC/AC逆变器的性能会随负载参数变量而下降,基于电压电流双闭环控制的逆变器模型,提出了一种新的负荷在线参数估计的控制方法。在这种方法中,逆变器的负载参数是在线计算的。逆变器控制器系数根据负载参数而修改。控制器参数修改策略给定和给出了仿真和实验结果确认该方法的有效性。
Ⅰ.导论
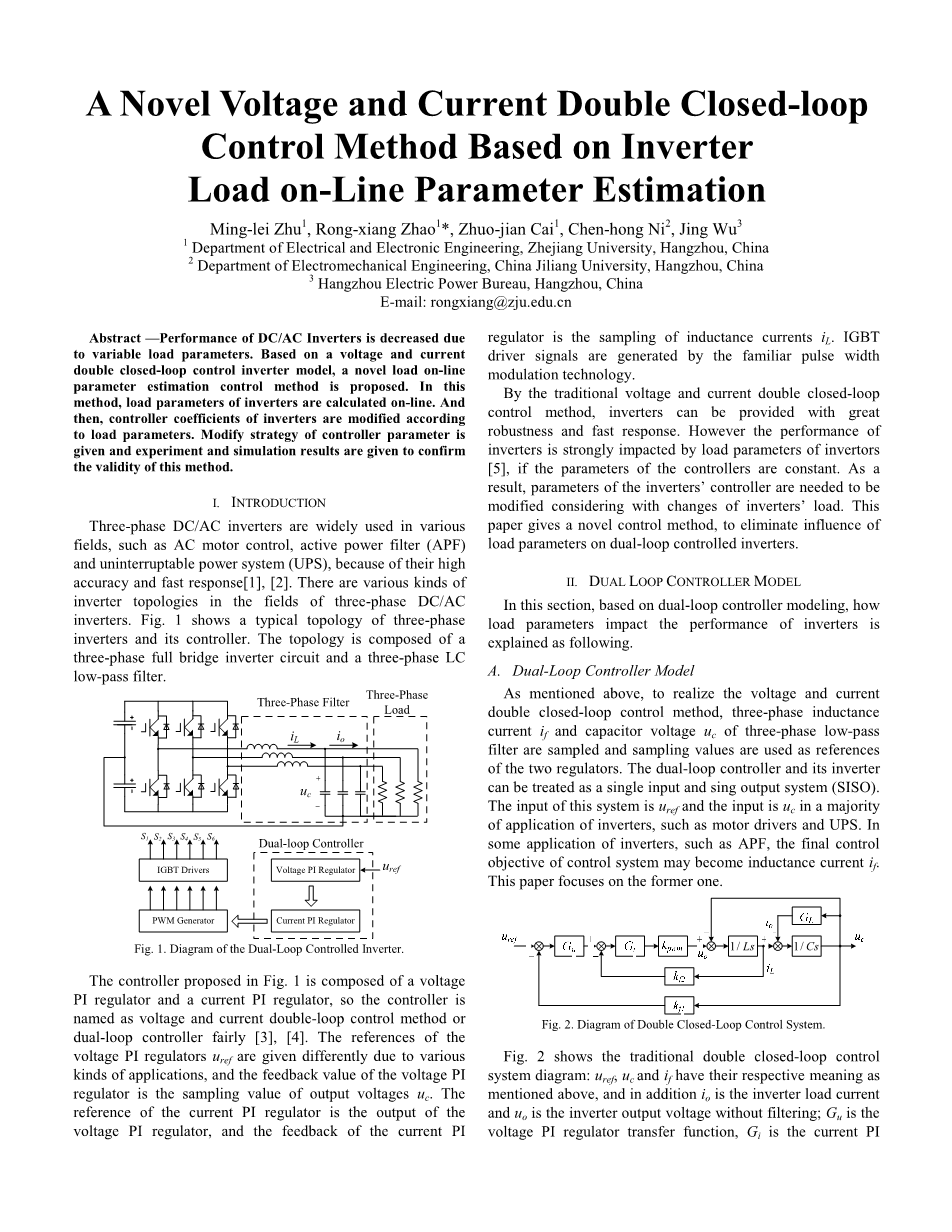
由于其高精度和快速响应的优点,三相 DC/AC 逆变器广泛应用于各种交流电机的控制有源电力滤波器 (APF) 等领域和不间断电源统 (UPS)[1],[2]。在三相DC/AC逆变器领域有各种各样的逆变器拓扑结构。图1显示了一种典型的三相逆变器及其控制系统的拓扑结构,主电路由三相全控桥及三相LC低通滤波器组成。
图表 1双闭环控制逆变器
在图1中提出的控制器是由电压PI 调节器和电流 PI 调节器组成的,因此控制器命名为电压和电流双闭环控制方法或双闭环控制器 [3],[4]. 电压PI 调节器参考电压 Uref,根据不同应用场合和电压PI调节器的反馈值是输出电压Uc的采样值,以不同的方式给出。电流PI调节器的参考电流是电压PI调节器的输出值。电流PI调节器的反馈值是电感电流。IGBT驱动信号是由熟悉的脉冲宽度调制技术生成的。由传统的电压和电流双闭环控制方法,逆变器可以提供很好的鲁棒性和快速响应。然而如果控制器的参数保持不变,逆变器的性能受到逆变器负载参数的强烈影响[5],因此,逆变器的控制器参数修改需要考虑与逆变器的负载变化。本文给出了一种新型控制方法,消除了负载参数对双闭环控制逆变器的影响。
Ⅱ.双闭环控制模型
在本节中,基于双闭环控制器建模,负载参数如何影响逆变器性能解释如下。
- 双闭环控制模型
如上文所述,为了认识电压电流双闭环控制方法,低通滤波器的三相电感电流和三相电容电压值被采样同时采样值作为两个PI调节器的参考值。双闭环控制器和逆变电路可以被视为一个单一的输入和输出系统 (SISO). 这个系统的输入是且输入是在大多数逆变器,电机驱动,ups等应用中的uc。在逆变器的一些应用中,如有源电力滤波器,控制系统的最终控制目标可能是电感电流,本文侧重于前者。
图表 2双闭环控制系统框图
图2显示了传统的双闭环控制系统关系图,,,如上文提到的有它们各自的意思,另外io是逆变器负载电流,uo是未经过滤的逆变器输出电压;是电压PI调节器传递函数,是电流PI调节器传递函1/ls和1/Cs是低通滤波器传递函数模型和是逆变器负载传递函数;是电压反馈增益,是电流反馈增益;是PWM信号的增益。
方程(1)是逆变器主电路的基本模式其中描述了状态变量的变换关系。
方程(2)简要说明io的变化影响uc 。
方程(3)是两个PI调节器的传递函数模型,kp1和kp2的比例系数,ki1和ki2是积分系数。
方程(4)是考虑图二控制器结构的的表达式,为了方便分析,采用(4)式中的单元反馈形式。意味着kf1和kf2等于1。
因为(4)是有点复杂,两个参数在(5)中有定义。因此(4)可以如下写。
方程(7)是uc结合(2)和(5)的表达。
虽然(7)不是一个上述单输入单输出系统最终变换函数表达式,但它可以用于分析负载参数如何影响逆变器的性能。
要得到完整的数学模型,负载电流io和电感电流如(8)中定义。
方程(9)是基于(7)及(8)完整的逆变器的双闭环控制系统数学模型。
B.负载电流和电压零稳态误差
在电机驱动系统和 Ups,零稳态误差是一个非常重要的参数,来评估整个逆变器系统。零稳态误差△u如图十所示。当△u等于0,输出电压跟随参考电压.
传统的控制方法,控制器的参数被设计为常数。如果负载电流变化很大,逆变器输出电压的零稳态误差就会增加。例如,控制器参数设计为轻负载电流情况,那意味着通过控制器,△u非常接近0.当负载电流增加到重负载水平,根据公式(10),△u增加非常大。换句话说,负载电流io增大时输出电压uc降低。如果这种情况发生在电机驱动系统的低电压意味着电动机将无法正常工作。
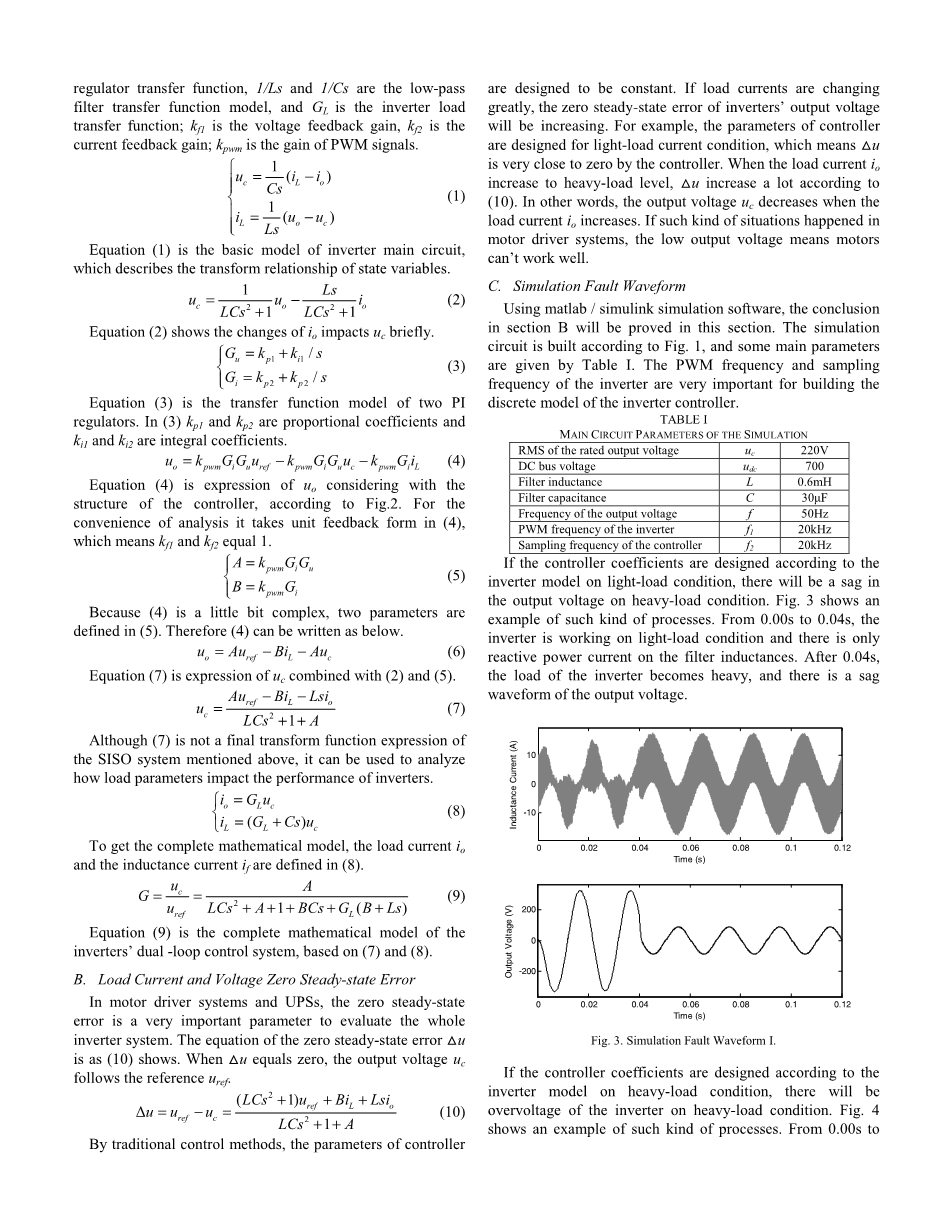
C.模拟故障波形
使用matlab/simulink仿真软件,B节中的结论将在本节中证明。模拟电路根据图1和表一给的几个主要参数建立。PWM调制频率和逆变器的采样频率对于建立逆变器控制器的离散模型是非常重要的。
表一:主电路参数的仿真
|
额定输出电压的有效值 |
220V |
|
|
直流母线电压 |
700 |
|
|
滤波器电感 |
L |
0.36mH |
|
滤波器电容 |
C |
30UF |
|
输出电压频率 |
f |
50Hz |
|
PWM频率 |
f1 |
20KHz |
|
控制器采样频率 |
f2 |
20KHz |
如果控制器系数根据逆变器模型在轻载条件下设计,在重负载条件下输出电压将会有凹陷。从0.00s到0.04s,逆变器工作在轻载条件下只有当前对滤波电感的无功功率。0.04s后逆变器的负载重载,输出电压波形凹陷。
图表 3模拟故障波形1
如果控制器系数根据逆变器模型在重负载条件下设计,将会有在重负载条件下逆变器的过电压。图4显示了这种过程的示例。从0.00s到0.04s,逆变器工作在轻载条件下,在图4中有一个过电压波形。0.04后,逆变器负载重载,输出电压正常。
图表 4模拟故障波形2
在上面两个仿真中的两个调节器的比例积分控制系数如下表所示,很明显,系数更适合于重负载情况相比轻负载情况。表二中的系数是离散的。
表2:控制器系数
|
轻负载 |
重负载 |
|
|
0.15 |
0.8 |
|
|
0.003 |
0.015 |
|
|
0.05 |
0.1 |
|
|
0.001 |
0.005 |
常系数的控制器不能保持逆变器在变负载荷条件下良好工作。它将导致零稳态误差电压输出较大和逆变器系统不能正常运作。
Ⅲ.修改策略
A.负载电流估算
在变负载的情况下,负载电流的瞬时值需要在控制器作进一步动作时估计出来。
电感电流 iL 包含负载电流 io 和当前注入滤波电容器。IL的值和uc被双闭环控制器采样。这样io的值根据(11)式很容易算出来。
方程式(12)是方程(11)式的离散化形式,能被用来数字化控制.Ts是控制器的采样时间。
B.修改控制器策略
常系数控制器不能使逆变器工作在时变负载条件。因此需要根据时变负载电流 io修改系数。
图表 5双闭环控制器的修改策略模块
如图 5 所示,修改策略模块添加到双闭环控制器。两个调节器的系数Gu和Gi通过该模块修改。修改策略模块的原则如下
为解决上文提到的零稳态误差和负载电流,进一步的结论由公式(8)得出。为减小输出电压的零稳态误差△u,公式(8)中的参数lsquo;Arsquo;需要扩大而参数lsquo;Brsquo;不能增加。而其他参数保持不变,如 L、Uref。然而根据公式(5),参数A和B是耦合的。于是,Gu需要增加而Gi需要减小来缩小△u。此规则是适合重负荷条件下,在此规则下公式(8)可以简化为公式(13),考虑参数L,C和uref是比参数iL和Gu小得多这一条件。
因此,如果电压调节器的增益足够,Gu对于重负载情况是非常重要的。但对负载轻条件,增益Gu太大将使逆变器系统不稳定。图3和图4中的故障波形原因有一些差异。图三中的波形故障可以用(8)(13)分析解释。在图4中的故障波形可以被解释为不稳定系统模型。方程(9)是双闭环控制逆变器的完美模型。以下分析基于修改策略详情。
电压调节器的Gu对于抑制逆变器系统的零稳态误差很重要。但增益Gu太大将使逆变器系统不稳定。现在我们选择第二章 C 节建立的逆变器的完整的数学模型来进行仿真系统。主电路参数引用表一。在表一中,直流母线电压是700V。根据拓扑结构显示图 1,图2和图5中的增益kpwm等于350。控制器的系数参考表二第三栏。但这些离散系数需要转换为连续的系数,同时连续域比例系数等于离散域的比例系数,而连续域积分系数等于结果乘以离散域采样频率 f2。逆变器负载传递模型GL 等于 1/10,代表负载。这些参数系数以(9)中的值替代,然后建立了逆变器数学模型。这个波德图可以由 Matlab 绘制。
图表 6稳定数学模型BODE图
图 6 是伯德图的数学模型。系统在50Hz频率时的幅度等于1 (0dB)。因为模型是一个单位反馈模型,这意味着输出Uc跟随输入的Uref。在频率高于3kHz,幅度衰减速度非常快,这意味着高频分量可消除。增益裕量大于 50 分贝,这意味着系统有极大的稳定性。
为了尽量减少零稳态误差,根据 (12),Gu的增益必须要足够大。但对Gu的增益不能增加任何限制。如图 7 所示,基于图6中的模型,当kp1增加到3时增益裕量小于20dB。此外,在15kHz到20kHz,幅度都是正值,这意味着15kHz至20kHz,将会在这些组件中产生共振。共振振动将影响逆变器的正常工作。
C.嵌入式策略修改模块
这一节侧重于策略修改模块是如何嵌入到双闭环控制器中的。这个问题关连到逆变器的实际应用。只有两个嵌入式策略修改模块模式的讨论如下。
1) 分段修改策略
分段PID方法是工程应用中的常用方法且易于实现。由分段方法,负载电流范围可以分为几段时间间隔。在每个区间内,都有一组系数适用于当前的时间间隔。
图表 7不稳定数学系统BODE图
如图8所示,当负载电流是i1时,系数组(kp1,ki1)(1)是合适的,而系数组(kp1,ki1)(2)将使逆变器系统不稳定。当负载电流是i3,系数组(kp1、ki1)(2)是合适的,但是如果我们采用系数组(kp1,ki1)(1),将使输出电压凹陷。如图 6 所示,由于系数组快速切换将导致系统振荡和不稳定,在两个相邻间隔区间内,死区是必要。如果负载电流从i1增长到i3,系数保持不变。如果负载电流从i1增长到i3,系数组是切换到 (kp1,ki1)(2)。
2) 连续修改策略
在高精度要求的应用中,系数组的检测与修改都要求连续。
如图 9 所示,负载电流io由iL和uc的采样的值估计得到。io的估计值是两个PD环节的输入。两个PD环节的输出分别是两个系数kp1和ki1的增量。参考值kp1*,ki1* 是电压闭环Gu无负载条件时的系数。适当的微分系数有利于快速变化负载电流。连续模式比分段的模式具有更高的可靠性,但是更复杂。
Ⅳ.仿真结果
回看第二章C节,有图3和图4两个故障波形。为解决这两个波形的问题,在第三章C节提到的分段 PID 方法被采用。当负载电流较轻,我们选择表二第二列中的系数组。当负载电流较轻是,我们选择表二中第三列的的系数组。如图10所示,在0.04s前, 电感电流低于 10A,包含无功功率。在0.04s后,电感电流大于50A。在这期间,输出电压的有效值是220V,输出电压的零稳态误差小于2V。
Ⅴ. 结论
由于逆变器对其负载参数变化的敏感性,时变负载时,常
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[152842],资料为PDF文档或Word文档,PDF文档可免费转换为Word



