基于感应电机的无传感器模糊逻辑控制的MRAS和龙贝格观测器在自适应机制中使用SIFLC控制器外文翻译资料
2022-11-11 15:04:44
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
基于感应电机的无传感器模糊逻辑控制的MRAS和龙贝格观测器在自适应机制中使用SIFLC控制器
Haitam Chalawan, Ahmed Essadk , Tamou Nasse
- 穆罕默德五世大学,ENSET,拉巴特,摩洛哥
- 穆罕默德五世大学,ENSET,拉巴特,摩洛哥
- 国家计算机科学与系统分析学院,拉巴特,摩洛哥
摘要:大多数工业应用需要高性能的无速度传感器操作和新的控制方案以获得快速的动态响应。在本文中,我们提出了MRAS和龙贝格观测器基于模糊逻辑控制SIFLC类型的比较。我们还提出了感应电动机(1M)的无速度传感器模糊逻辑控制(SIFLC)。这个命令是一个强大的工具,可以排除干扰。然而,抖动现象对可变结构系统来说是主要的缺点。为了减少这个问题,使用饱和函数来限制抖动效应。基于模糊逻辑自适应机制的MRAS和龙贝格观测器被设计用于速度估计。这些提出的方案将允许这种驱动器的计算时间的大量减少,并因此便于其实现。 所提出的方案的数值模拟结果说明了抗负载扭矩扰动的鲁棒性和无传感器感应电动机的良好性能。
关键词:感应电机; 模糊逻辑控制; 自适应模型参考系统(MRAS); 龙贝格观测器。
I.引言
感应电动机是在各种工业应用中最广泛使用的机器之一,原因在于他的可靠性高,维护要求适度和相对低的成本,且有许多工业应用需要高动态性能和对不同扰动的鲁棒性。 因此,稳定控制算法在稳定和跟踪轨迹中是期望的。 可变结构控制可以对参数变化,外部干扰抑制和快速动态提供良好的不敏感性[1]-[2]。
在工业应用中最广泛使用的控制器是PID型控制器,因为它们在范围宽的操作条件下具有简单的结构和高性能。PID控制器的参数通过诸如Nichols和Zeigler,极点分配等已知方法而以最佳方式选择。PID控制器虽然简单的,但不能总是有效地控制具有变化参数或具有强的非线性的系统; 同时PID控制器可能需要频繁的在线重调谐[3]。
近年来,科学家们已经做出很大努力来提高感应电动机的机械鲁棒性和可靠性,并且降低成本和硬件复杂性。因此,有必要消除速度传感器。 在文献中已经提出了几种速度估计器的方法,其中包括龙贝格和MRAS(模型参考自适应系统)估计器。 它能够提供转子速度和通量,而没有闭环积分的问题。 在本文中,模糊逻辑控制器(SIFLC)取代了两个观察者的速度适应机制中的PI控制器。 Zadeh [7]介绍的FLC的主要优点是它不需要所研究系统的精确数学模型。 模糊逻辑是基于IF-THEN规则与人类语言的语言规则。
II.感应电机的建模
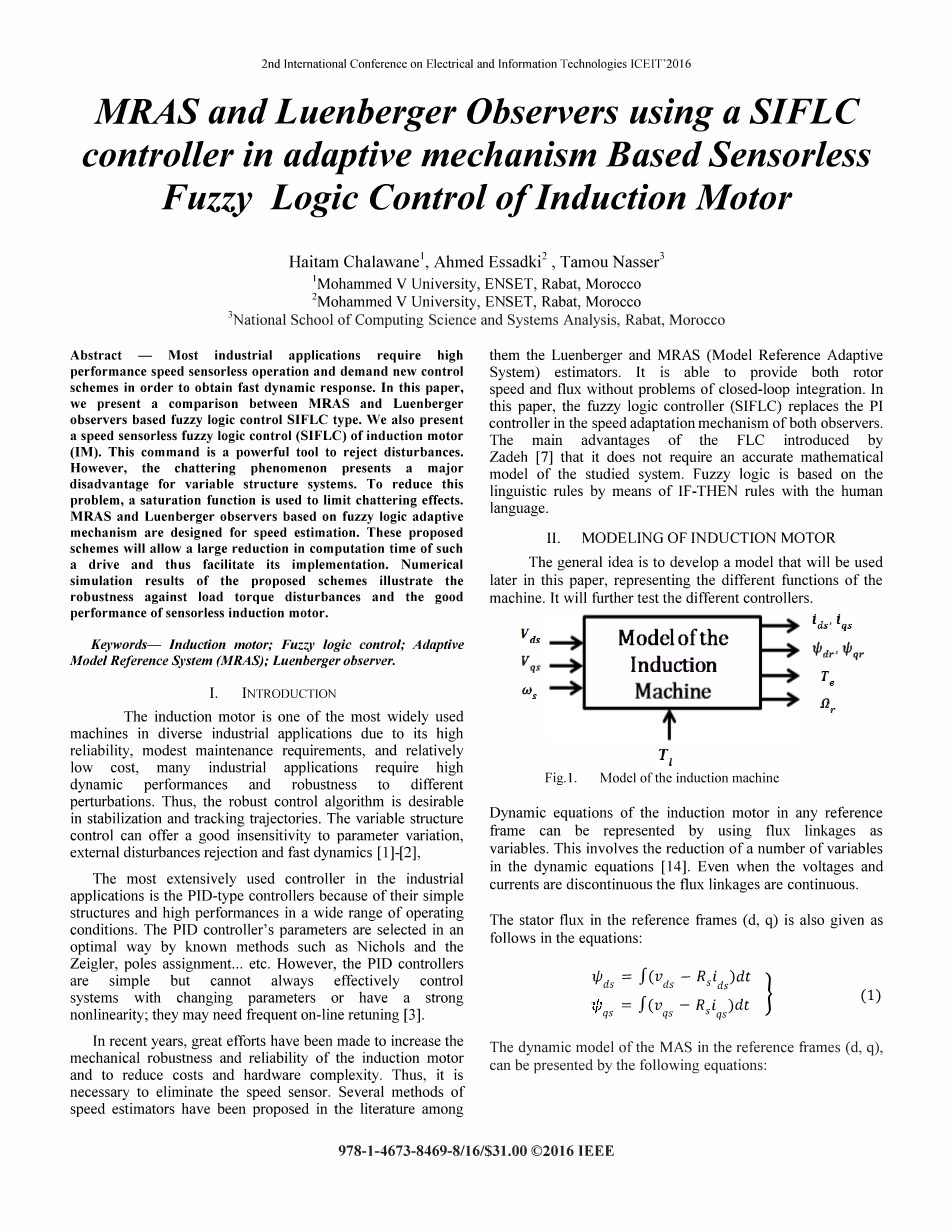
一般的想法是开发一个将在本文后面使用的模型,代表机器的不同功能。 它将进一步测试不同的控制器。
图1 感应电机的建模
在任何参考系中的感应电动机的动态方程可以通过使用通量链接作为变量来表示。 这涉及动态方程[14]中减少一些变量。 即使当电压和电流不连续时,磁链也是连续的
参考系(d,q)中的定子通量也在以下等式中给出:
参考系(d,q)中的MAS的动态模型可以通过以下等式表示:
定子参考系中感应电动机的电磁转矩由下式给出:
III. 间接转子面向领域的控制
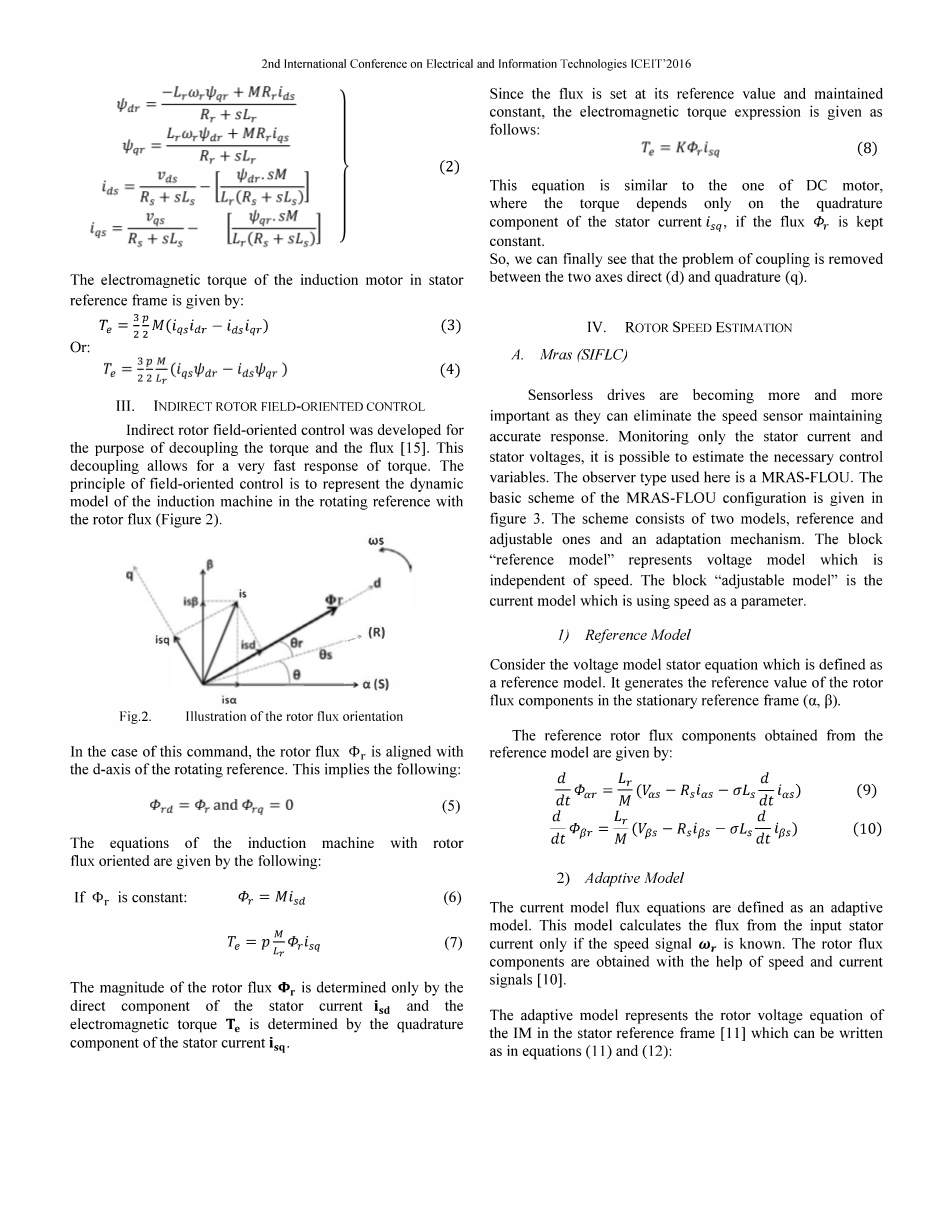
间接转子磁场定向控制的开发用于解耦转矩和磁通[15]。 这种解耦允许扭矩的非常快的响应。 磁场定向控制的原理是用转子磁通表示感应电机在旋转参考中的动态模型(图2)
图2转子磁通方向的图示
在该命令的情况下,转子磁通与旋转参考的d轴对齐。 这意味着:
具有转子磁通定向的感应电机的方程由下式给出:
如果是常数: = (6) =p (7)
转子磁通的大小仅由定子电流的直接分量确定,并且电磁转矩Te由定子电流isq
的正交分量确定。
由于磁通设定在其参考值并保持恒定,电磁转矩表达式给出如下:
=K (8)
该方程类似于直流电动机,其中如果磁通保持恒定,则转矩仅取决于定子电流isq的正交分量。
因此,我们终于可以看到,耦合的问题在两dq轴去除。
IV. 转子速度估计
MRAS(SIFLC)方法
无传感器驱动器变得越来越重要,因为它们可以消除速度传感器保持精确的响应。 仅监控定子电流和定子电压,可以估计必要的控制变量。 这里使用的观察器类型是MRAS-FLOU。 MRAS-FLOU配置的基本方案在图3中给出。该方案包括两个模型,参考和可调整的模型以及适应机制。 块“参考模型”表示独立于速度的电压模型。 块“可调模型”是使用速度作为参数的当前模型。
1)参考模型
考虑定义为参考模型的电压模型定子方程。 它产生静止参考系(alpha;,beta; )中转子磁通分量的参考值。
从参考模型获得的参考转子磁通分量由下式给出:
2)自适应模型
当前模型通量方程定义为自适应模型。 该模型仅在速度信号已知时才计算来自输入定子电流的通量。 转子磁通分量是在速度和电流信号的帮助下获得的[10]。
自适应模型表示定子参考系中的1M的转子电压方程[11],可以写成等式(11)和(12):
或者:=/
3)适应机制
最后,自适应机制方案产生要使用的估计速度的值,以使参考和估计通量之间的误差最小化[9]。 转子磁通MRAS方案通过定义要由PI模糊控制器最小化的速度调谐信号Ew来执行,PI模糊控制器产生反馈到自适应模型的估计速度。 速度调谐信号和估计速度的表达式可以表示为:
转子速度由下式给出:
在本文中,我们将通过模糊逻辑控制器来替换MRAS估计器适应机制中的PI控制器。
自适应机制使用模糊逻辑控制器
自适应模型
参考模式
图3 使用模糊逻辑控制器的MRAS框图
自适应龙贝格观察器
龙贝格观测器是基于系统的确定性模型的确定性类型的观察者[5]。 龙贝格状态观测器用于通过包括基于Lyapunov理论的自适应机制来估计感应电动机的通量分量和转子速度。 一般来说,龙贝格的等式可以表示如下:
符号表示估计值,L是观测器增益矩阵。 适应速度的机制是由李亚普诺夫理论推导的。 定子电流和转子磁通的估计误差,即观测器和电机模型之间的差,由[6]给出:
考虑到状态向量的结构如下,获得龙贝格观测器的等式:
状态向量由dq轴系统中的定子电流分量和转子磁通分量形成,输入向量给出如下
输出向量给出如下:
其中和是dq轴系统中的定子的张力,和是dq轴系统中的定子电流。 在龙贝格的情况下,矩阵的投影使用确保感应电机自值和基于k比例系数的估计量之间的比例的公式。
A,B,C和L由下式给出:
A,B,C和L矩阵的组成元素由下式给出:
其中:Ls,Lr,M是定子,转子和互感; Rs,Rr是定子和转子的电阻,sigma;是相互色散系数,k是通过极放置方法获得的正系数。
我们考虑以下Lyapunov函数:
或者: e = x -
其中lambda;是正系数。 通过推导方程(24),用于估计转子速度的适应定律可以推导为:
其中
在本文中,我们将通过一个拟议的模糊逻辑控制器来替换Luenberger观测器适应机制中的PI控制器。
模糊逻辑控制器
模型
处理器
图4 提出了自适应龙贝格观察器的框图
V.模糊逻辑控制器
模糊逻辑对于由于数据不可用而不能被数学建模容易地表示的大多数问题特别有效,[8]不完全或者过程太复杂。 这样的系统可以通过添加新规则来添加新功能或提高性能轻松升级[4]。
我们可以将经典FLC控制器的两个输入(误差及其导数)替换为在SIFLC的建议块方案中注意到的另一个等效(图5)。事实上,本研究基于有符号距离方法,允许 将模糊规则的表面的维度从三变换为二。 SIFLC使用的块方案如下图所示:
图5。SIFLC块方案
速度调谐信号“e”及其变化率“”分别乘以两个缩放因子K1和K2,因此控制器的输出乘以第三缩放因子K3,并且获得估计速度。 试验和误差技术用于为最佳性能提供缩放因子的值[12,13],因此对k1,k2和k3获得的值分别为2.2,3.1和0.89。
模糊算法在本研究中使用三角形和梯形类型的隶属函数。 输入的范围在-5到5之间,输出在-100到100之间,具有三角形和梯形函数,如图6所示。
图6 速度调节器的函数方案(a)输入(b)输出
所提出的控制器的输入I及其输出S分别被模糊化,解模糊化并具有用于FLC标准变量的相同FA和Fes,并且规则的表面简化为二维函数,因此模糊规则表 简化为以下:
表1:SIFLC规则表
SIFLC控制器的主要优点是它将模糊规则的数量从(n * n)减少到n:在我们的例子中是25到5.这无疑将大大减少计算时间。
VI。 模拟结果和讨论
基于龙贝格观测器和MRAS估计器,在适应机制中使用模糊逻辑控制器对感应电机的模糊逻辑控制进行了一系列模拟测试。
仿真已经在Matlab / Simulink下实现。 感应电动机的使用参数如图2所示
- 在负载转矩下工作
下图表示使用MRAS和龙贝格观测器从操作负载获得的模拟结果。 我们施加150rad/S的参考速度。 我们在t = 1.5s和t = 3s之间施加-20N.m的负载转矩。
图7 转子电流:(a)基于MRAS,(b)基于龙贝格
图8 定子电流:(a)基于龙贝格,(b)基于MRAS
图9 感应电动机的扭矩:(a)基于MRAS(b)基于龙贝格
图 10 提议的龙贝格的错误
图11 提议的MRAS的错误
图12感应电机速度(a):建议的实际速度,(b)提出的MRAS的实际速度,
(c)参考速度
图13 感应电机的d轴转子磁通,(a)基于MRAS提出,(b)基于龙贝格
图13感应电机的q轴转子磁通,(a)基于MRAS提出,(b)基于龙贝格
利用上述结果,我们可以看出,在过冲,静态误差和快速响应方面,在不同的工作在反向和低速度下的良好的估计速度跟踪性能测试。 磁通量与标称情况非常相似。 定子相电流保持正弦并且具有适当的值。 从这些模拟结果显而易见,所提出的观察者呈现出优异的性能。 因此,我们可以推断,MRAS估计器优于Luenberger观测器来估计转子磁通和速度。
我们在下表中给出每个观察者对系统的动态性能的影响,以及它们与间接转子场定向控制的行为。
表2 表显示了观测器的影响
|
观察结构 |
提议龙贝格 观测器 |
提议MARS 观测器 |
|
|
比较标准 |
|||
|
动力学 性能 |
响应信号时间 |
差 |
卓越 |
|
信号波动 |
最差 |
好 |
|
|
控制操作(去耦损耗) |
高性能 |
高性能 |
|
VII. 结论
本文着重于使用模型参考自适应系统(MRAS)技术和龙贝格观测器提出的异步电机的无传感器控制。 无传感器控制具有模糊逻辑控制的优点,无需使用任何传感器。 在自适应机制观测器中常规使用的PI控制器由模糊逻辑控制器代替。 毫无疑问,这个建议将大大减少计算时间,便于其实现,并可用于1M的高性能,特别是在非常低的速度。
在相同条件下比较这两个估计量,我们观察到相同的结果。 因此,可以得出结论,所提出的MRAS估计器优于用于估计转子磁通和速度的龙贝格观测器。
附件
表3:感应电机参数
参考文献
[I] V.I Utkin, 'Variable structure systems with sliding modes,' IEEE Trans. Automat. contr,A C-22, pp. 212-221. February 1993.
[2] A Ghazel, B. de Fornel, J.e. Hapiot, 'Robustesse du
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[137753],资料为PDF文档或Word文档,PDF文档可免费转换为Word



