无刷直流电机跟踪控制采用自整定模糊PID控制和模型参考自适应控制外文翻译资料
2022-11-29 15:47:13

英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
无刷直流电机跟踪控制采用自整定模糊PID控制和模型参考自适应控制
Adel A. El-samahy a, Mohamed A. Shamseldin
a埃及赫尔万大学工程学院
b埃及埃及未来大学工程技术学院
收到2015年1月21日 2015年9月12日修订; 接受2016年2月29日
摘要:本文比较了两种应用于高性能无刷直流电机的不同控制技术的性能。 第一种方案是自整定模糊PID控制器,第二种方案是带有PID补偿器的模型参考自适应控制(MRAC)。 控制算法的目的是强制转子转速遵循期望的参考速度,所有时间都具有良好的精度。 无论负载干扰和参数变化如何,都应该为不同的速度/时间轨迹实现这一目标。 仿真结果表明,第二种控制方案具有较好的性能。
2016年艾因沙姆斯大学工程学院。 由Elsevier B.V.生产和托管这是根据CC BY-NC-ND许可证的开放获取文章
关键词:无刷直流(BLDC)电机;模型参考自适应控制(MRAC)
1 介绍
BLDC电机是一种永磁同步电机。 它们由直流电压驱动,但是通过固态开关实现电流通断。 换向时刻由位置传感器或无传感器技术检测的转子位置确定[1]。 BLDC电机具有以下优点:使用寿命长,高动态响应。高效率。更好的转速与扭矩特性。更高的速度范围
较高的扭矩重量比。
因此,BLDC电机已被广泛应用于诸如电动汽车,机器人和CD-ROMS等应用中,并且在这种应用中,BLDC电机暴露于多种负载扰动。在突发干扰和参数变化的情况下,传统的控制方法无法以良好的精度实现所需的速度跟踪。通过实现自适应控制,可变结构控制,模糊控制和神经网络等先进的控制技术,可以缓解这个问题[2]。可变结构控制器简单,但难以实现。这是因为控制信号突然变化的可能性,这可能会影响系统运行[3]。基于神经网络的电机控制系统具有很强的解决结构不确定性和系统干扰的能力,而需要更多的计算能力和数据存储空间[3]。模糊控制理论通常提供非线性控制器,即使对于不确定的非线性系统也能执行不同的复合非线性控制动作[4]。与传统控制设计不同,FLC不需要系统模型的精确知识,如系统传递函数的极点和零点[5]。基于专家知识数据库的模糊逻辑控制系统需要较少的计算,但对新规则缺乏足够的能力[1]。因此,模糊控制器的作用之间的组合是模糊控制器的作用是根据误差和误差的变化来调整PID控制器参数,与通用PID控制相比可能是一个很好的选择[3,4]。
自适应控制是广泛使用的控制策略之一,设计先进的控制系统以获得更好的性能和精度。 模型参考自适应控制(MRAC)是具有一些可调控制器参数和调整机制来进行调整的直接自适应策略[6]。 与知名和简单的结构化固定增益PID控制器相比,自适应控制器非常有效地处理未知参数变化和环境变化[7]。
本文采用两种先进的控制策略进行比较。第一种控制技术是自调节模糊PID控制器,与常规PID控制器相比表现出良好的性能。第二个技术是基于MRAC。 实施MRAC显示出可重复的性能,但是它具有高的过冲和持续的稳态误差。 将MRAC与PID控制补偿器相结合将消除过冲和稳态误差
本文的其余部分组织如下:第2节介绍的BLDC电机的mathe-matical模型。在第3节中,自整定模糊PID控制器专为BLDC速度控制而设计。 在第4节中,显示了MRAC的设计步骤。 在第5节中,显示了模拟结果,第6节显示了结论。
2 基于状态空间的BLDC电机建模
状态空间方程法是现代控制理论中普遍的分析方法。 随着计算机技术的快速发展,状态空间法在设计控制系统方面越来越受欢迎[8,9]。假设三相BLDC电机由两相导通模式中的全桥驱动控制,如图3所示。 1 [10]。然后BLDC电机的状态空间模型在(1)中。
其中uAB,uBC:线电压,eAB,eBC:回线电动势,R:相位
绕组电阻,L:绕组的相电感,J:转子惯性矩,TL:负载转矩,x:转子转速,h:转子位置,Bv:粘性摩擦系数,iA,iB:相电流。
图1 BLDC电机的等效电路
通过使用MATLAB模型对该模型的仿真结果进行了验证,验证了状态空间模型的有效性。 两个模型的结果是相同的。
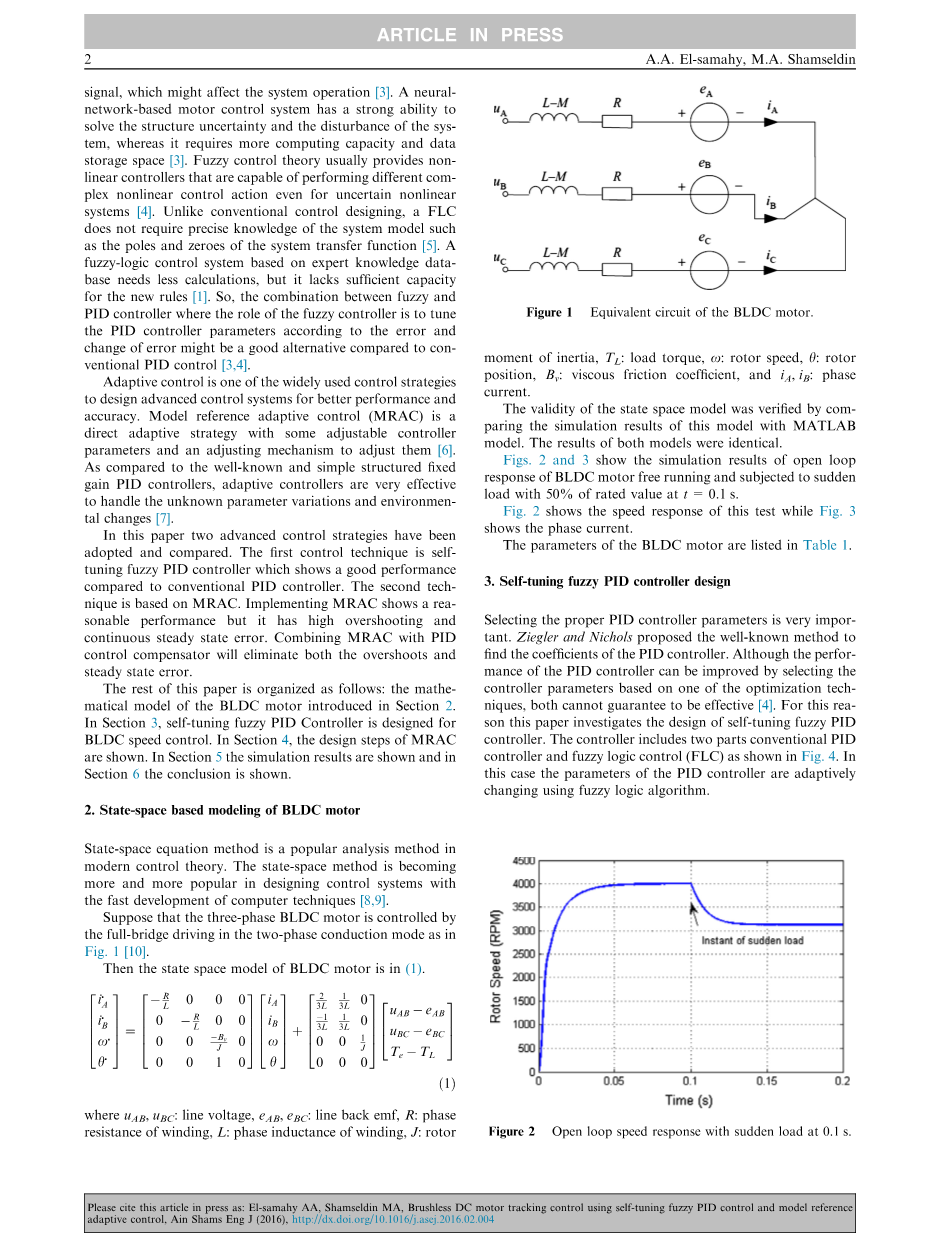
图2和图3显示了在t = 0.1s时BLDC电机自由运行的开环响应和额定值为50%的突然负载的模拟结果。
图2示出了该测试的速度响应。图3显示了相电流。
BLDC电机的参数如表1所示
3 自整定模糊PID控制器设计
选择合适的PID控制器参数非常重要。 齐格勒和尼科尔斯提出了众所周知的方法来寻找PID控制器的系数。 虽然通过根据优化技术之一选择控制器参数可以提高PID控制器的性能,但两者都不能保证有效[4]。 本文对自调整模糊PID控制器的设计进行了研究。 控制器包括传统PID控制器和模糊逻辑控制(FLC)两部分,如图1所示。 在这种情况下,PID控制器的参数使用模糊逻辑算法自适应地改变。
图2在0.1 s突然负载时的开环速度响应
图3 0.1负载时相电流的开环响应
图4自整定PID模糊控制器的结构
PID控制器参数根据以下等式更新:
其中Kp1:比例修正系数,Ki1:积分修正系数Kd1:衍生修正系数cient,Kp:初始比例增益(常数值),Ki:initial积分增益(常数值),Kd:初始微分增益(常数值)。
因此,自整定模糊PID控制器的控制信号可以描述如下:
其中Kp2,Ki2和Kd2是PID控制器的新增益。 模糊逻辑控制的一般结构如图5所示并包括三个主要组成部分。
3.1 模糊化
这将输入数据转换成合适的语言值。 如图所示。 5,控制器有两个输入:错误信号的误差和速率变化。 对于正在研究的系统,e(t)和De(t)的话语世界可以从[1,1]归一化,语言标签是{负大,负媒,负小,零,正小, 积极的媒介,积极的大},并在规则基础中被称为{NB,NM,NS,ZE,PS,PM,PB},输出的语言标签是{零,中小,小,中,大 ,中等大,非常大},并在规则库中称为{Z,MS,S,M,B,MB,VB}。图6和图7示出了模糊逻辑控制的输入和输出的成员。
3.2 规则基础
决策逻辑是模拟人类决策过程。 规则库在表2-5中简化。 输入e有7个语言标签,De有7个语言标签。 那么我们有7 7 = 49的规则基础。 本文简化了49〜25条规则库[3]。
3.3 去模糊化
这产生了一个推测的模糊控制动作的非模糊控制动作。 最流行的方法,重心或中心区域用于去模糊化。
图8显示了自整定模糊PID控制器的Simulink图。
自整定模糊PID控制器的控制器由PID控制器和模糊逻辑控制器两部分组成,它们在PID控制器的参数上线调整。
4 麻省理工学院规则设计MRAC的步骤
4.1 MRAC
自适应控制器由两个环路,一个外环路或一个正反馈回路以及一个内环或参数调整回路组成,如图9所示
MIT规则是模型参考自适应控制的原始方法。 该名称源自于在麻省理工学院仪器实验室(现为Draper实验室)开发的。 调整参数,使损失函数最小化[7,11]。
为了使J变小,在J的负梯度方向上改变参数是合理的,也就是说,
图5模糊逻辑控制结构
图6输入的成员函数(e,De)
图7输出功能(Kp1,Ki1和Kd1)
其中:适应率,e:输出速度之间的误差的BLDC电机和型号参考输出,h:控制器参数。从图10假设BLDC电机由单输入单输出(SISO)系统描述。
其中A和B是多项式取决于BLDC电机,u(t):控制器的输出,y(t):BLDC电机的输出速度和v(t):过程扰动。
图8自调整模糊PID控制器的Simulink图
图9模型参考自适应系统(MRAS)的框图
图10具有两个自由度的通用线性控制器
(7)中描述了控制器。
其中R,T和S是控制器多项式,uc(t):BLDC电机的期望速度。
(7)代入(6)将导致(8)
参考模型由单输入,单输入,输出(SISO)系统如下:
其中Am,Bm是多项式取决于参考模型和ym(t):模型参考的输出。假设v(t)= 0,因此:
让参考模型的传递函数为
am1,am2,am3,bm:模型参考传递函数系数。
假设BLDC电机的传递函数为
图11模型参考自适应控制的Simulink图
a1,a2,a3,b:BLDC电机传递函数系数。diophantine方程是
而A0是增益。 R和S是控制器多项式。
其中deg是多项式度。
图12 MRAC在不同自适应增益值下的速度响应
图13 MRAC的控制器输出在不同的适应速率值
图14具有PID补偿器的模型参考自适应控制的Simulink图
类似地
代入方程 (14) - (17)等式 (7)将导致(18)
从等式(6)并假设v(t)= 0
(19)代入(20)将导致(21)
方程式 (21)可以写成如下:
代入方程 (11)和(22)变成(23)
从等式(5)得出
类似的
图15突发负荷时,MRAC与PID补偿器和自整定模糊PID控制器的速度响应
图16自整定模糊PID控制器和带有PID补偿器的MRAC在突然负载时的控制器输出
图17具有PID补偿器和自整定模糊PID控制器的MRAC与惯性突然变化的速度响应
其中n(阻尼比)= 1,xn(固有频率)
= 1000(由设计师选择)。
图11显示了Simulink的整体框图驱动系统包括MRAC。
在负载突然变化的速度调节下对MRAC的性能进行了调查。图12显示了MRAC在0.25s时承受负载转矩突然增加50%额定转矩的能力。 该测试以不同的适应率值进行。 可以注意到,较高的适应率将提供更好的性能(较少的上升时间),高过冲和高稳态误差。图13显示了相应的MRAC输出。
4.2 MRAC带PID补偿器
MRAC旨在消除模型参考的输出与实际速度之间的差异。它不考虑参考速度和实际速度之间的误差。 这种缺点可以通过采用PID来缓解补偿器 PID补偿器的参数通过反复试验选择。 表5显示了改变每个PID补偿器参数对系统性能的影响。
图14显示了具有PID补偿器的MRAC的Simulink图
5 模拟结果
已经进行了几项测试来比较自整定模糊PID控制器和MRAC与PID补偿器的性能。
5.1 负载突然变化时的调速
图15显示了自整定模糊PID控制器与带有PID补偿器的MRAC的比较。 比较表明,具有PID补偿器的MRAC具有更好的性能。 在突然加载的情况下,上升时间也较少
图18自整定模糊PID控制器和带有PID补偿器的MRAC在转子惯性突然变化时的控制器输出
图19具有PID补偿器和自整定模糊PID控制器的速度响应MRAC在相电阻突然变化时
图20自整定模糊PID控制器和带有PID补偿器的MRAC的控制器输出在相电阻突然变化
图21相位阻抗和惯性变化对带有PID补偿器的MRAC速度响应的影响
干扰和速度可以更快地恢复其期望值,图16显示了两个控制器的控制器输出。
5.2 参数变化时的调速
通过改变电机参数来研究提出的控制器。 为此目的进行了三项测试。 这些测试总结如下。
5.2.1 突然改变惯性
在该测试中,BLDC电动机的惯性在0.25s时将增加10%。图17显示了与自整定模糊PID控制器相比,MRAC与PID控制器补偿器在短时间内适应速度扰动的能力, 图18显示了两个控制器的相应控制器输出
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[25729],资料为PDF文档或Word文档,PDF文档可免费转换为Word



