可调转矩步进电机控制电路的设计外文翻译资料
2022-12-03 11:47:39

英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
可调转矩步进电机控制电路的设计
王瑜,傅依斌,陆帆,常震,邱小涵
关键词:步进电机; PWM控制; 光转换装置; 驱动扭矩
摘要-提出了一种电路控制星载光谱仪移光装置中步进电机的设计方案。 本设计采用FPGA作为核心控制芯片,LMD18200作为步进电机的驱动芯片。 为了减少轴承的磨损并克服轨道运行中阻力的增加,本设计增加了一个可以调节转速和驱动扭矩的功能。 执行PWM控制来调节驱动扭矩。 真正的测试证实,控制驱动扭矩和转速的设计范围符合光谱仪的要求。
介绍
步进电机是一种无刷电动机,可将数字脉冲转换为角位移和线位移。 步进电机具有惯量低,定位精度高,无积累误差,自锁,控制简单等特点。步进电机广泛应用于医疗仪器,精密机械,工业控制系统和航天设备等。
但是,步进电机有一个缺点,即它以阶跃模式旋转,但不是以恒定速度旋转。 这使得由电机驱动的负载不平稳地移动,并且在每个步骤中都具有加速和减速过程。 这个过程可以解释如下。 步进电机的转速由驱动时钟的频率决定,每个时钟电机移动一步。 如果由电流产生的驱动转矩大于适当的值,则它将车轮从较早的一个位置推到下一个位置。 在下一个驾驶时钟到达之前,由于电流不是固定的,电流没有被清除并稍微释放,所以车轮将保持在该位置。 而且,当车轮被握住时,由于电压仍然在绕组上,电流应迅速增加,并使电机产生更多的热量消耗。 另一方面,如果驱动转矩不足,电机将无法移动或失步。 因此,通常由绕组电流决定的合适的驱动转矩可以减少释放和热消耗,并且也确保正确的旋转。 在大多数应用中,设计师可以根据一定的速度选择合适的驱动扭矩。 但是,如果速度或要求的扭矩发生变化,固定的驱动扭矩并不总是合适的。
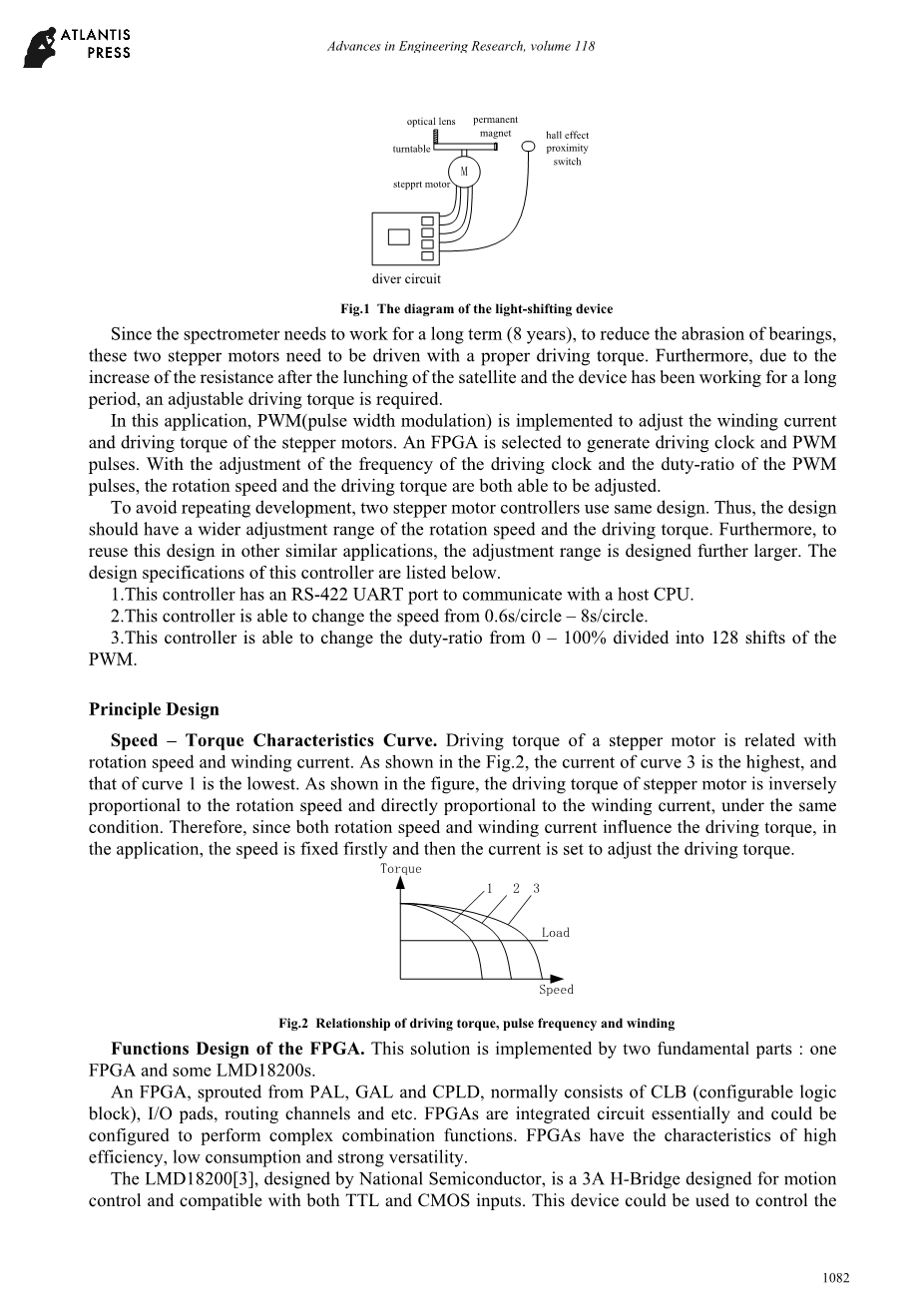
在真正的项目中,卫星天生光谱仪[1]包含两个步进电机来切换光路[2]。 移光装置的示意图如图1所示。 有一个步进电机,其轴与转台连接。 光学镜头固定在转盘上并与其一起旋转。 永久磁铁附在转盘的侧面。 当磁铁靠近霍尔效应接近开关时,会产生一个电子信号并传递给潜水员电路。 该电路根据接收它们的霍尔信号来确定步进电机的位置“0”。 步进电机沿一个方向旋转并校准位置“0”以消除由于失步而导致的错误。 选择步进角为0.9°的两相四线混合式步进电机并将其用于光转换装置。
图1移灯装置示意图
由于光谱仪需要长期工作(8年),为了减少轴承的磨损,这两个步进电机需要以适当的驱动扭矩驱动。 此外,由于卫星发射后电阻增加,并且设备长期工作,因此需要可调的驱动扭矩。
在这个应用中,PWM(脉宽调制)被用来调节步进电机的绕组电流和驱动转矩。 选择FPGA来产生驱动时钟和PWM脉冲。 通过调整驱动时钟的频率和PWM脉冲的占空比,可以调整转速和驱动转矩。
为了避免重复开发,两个步进电机控制器使用相同的设计。 因此,设计应该具有更宽的旋转速度和驱动扭矩的调节范围。 此外,为了在其他类似应用中重复使用该设计,调整范围设计得更大。 下面列出了该控制器的设计规格。
1.制器有一个RS-422 UART端口与主机CPU通信。
2.制器可以将速度从0.6s /圈改为-8s /圈。
3.可以将占空比从0 - 100%改变为128个位移。
原理设计
速度 - 扭矩特性曲线。 步进电机的驱动转矩与转速和绕组电流有关。 如图2所示,曲线3的电流最高,曲线1的电流最低。 如图所示,在相同条件下,步进电机的驱动转矩与转速成反比,与绕组电流成正比。 因此,由于转速和绕组电流均影响驱动转矩,因此在实际应用中,首先确定速度,然后设置电流来调节驱动转矩。
图2驱动转矩,脉冲频率和绕组的关系
FPGA的功能设计。 该解决方案由两个基本部分实现:一个FPGA和一些LMD18200。
AL,GAL和CPLD发芽的FPGA通常由CLB(可配置逻辑块),I / O焊盘,路由通道等组成.FPGA本质上是集成电路,可以配置为执行复杂的组合功能。 FPGA具有效率高,功耗低,通用性强等特点。
由美国国家半导体设计的LMD18200 [3]是一款3A H桥,设计用于运动控制并兼容TTL和CMOS输入。 这个设备可以用来控制
通过调制PWM信号的占空比来实现绕组电流。 需要两个LMD18200来驱动该项目中选择的一个两相四线步进电机。
如图3所示,FPGA的方案由一个通信模块和一些控制模块组成。
图3 FPGA的结构模块
通信模块实现支持UART通信协议的通信功能。 通过向通信模块发送指令包,用户可以设置步进电机的旋转参数。 如图4所示,参数包括序列号,转速,驱动力矩,方向,复位和“所需位置”。 并且“所需位置”指定了步进电机在驱动器电路接收到霍尔定位信号之后预期行进的步数。 控制器还向主机CPU发送一个状态数据包,以提供可用于主机的多个信息。 数据包的格式如图4所示。 根据工作状态,操作人员可以判断电阻是否增大,驱动力矩是否不足,然后调整PWM信号的占空比。 通常,2或3年后,驱动扭矩需要改变。
图4指令数据包和状态数据包
图3所示的控制模块用于控制步进电机。 一个控制模块用两个LMD18200驱动两相四线步进电机。 控制模块可以检测门厅定位信号,操作步进电机并将状态数据反馈给通信模块。 控制模块根据时间顺序和所需的速度生成步进驱动时钟。 它还根据指定的占空比产生PWM脉冲。 驱动时钟和PWM脉冲的数字如图5所示。
图5驱动时钟和PWM脉冲
电路设计
以FPGA为核心的系统框图如图6所示。 除FPGA外,该电路还包括四个LMD18200和一个包含DS26LV31T和DS26LV32AT的UART接口。 该电路使用FPGA接收来自通信端口的操作命令,输出信号以操作步进电机,并将步进电机的状态数据反馈回主机CPU。
图6系统的结构块
在原理设计中,FPGA是Xilinx芯片XC3S400-208,它具有400K门电路和120个I / O,足以满足使用要求。 使用Verilog HDL指定FPGA的逻辑设计。 整个方案在4层板上布局,电路板的实体如图7所示。 左侧连接器用于输出操作信号和输入霍尔定位信号。 4块LMD18200安装在电路板的左侧。 电路板中心的芯片是FPGA。 在电路板的右边缘,有两个连接器,一个是电源输入,需要 5V和 12V DC,另一个是RS-422 UART接口。
图7电路图
图7所示的电路板是一个原理设计。 卫星安装的最终设计将采用空间级元件制造,FPAG将由Actel反熔丝器件替代。 此外,该设备还将实施备用设计。
实验
为了确定驱动力矩是否足够,建立了一个实验平台,如图8所示。 将步进电机放置在平台上,并通过PC在固定转速下调整绕组电流。 并使用当前的示波器来监视电流。 将已知半径的特殊模具连接到步进电机轴上,并将一些用于测量驱动扭矩的砝码连接到模具上。 当砝码的悬挂点稳定地保持在电机轴的平面上时,用砝码的质量来计算驱动扭矩。 通过这种实验方法,可以测量在速度下通过调整绕组电流可获得的转矩范围。
图8实验平台
初始转速设定为0.8圈/圈,PWM脉冲的初始周期为3.2us。 在初始速度下,当PWM的占空比达到25%时,一步包含312.5个周期,步进电机恒星。
在初始速度下,PWM信号的占空比,绕组电流和驱动力矩的关系如图9所示。 图9(a)显示绕组电流由于占空比的变化而变化,(b)表示驱动转矩随电流变化。
图9占空比,驱动转矩和绕组电流的关系
如实验数据所示,在初始转速下,绕组电流每增加3,125%的占空比就会增加0.01-0.04A。 驱动扭矩的调整范围从0.013Nbull;m到0.102Nbull;m,并且符合卫星生成光谱仪[4,5]的要求。
此外,当步进电机运行时,由绕组电流产生的磁场的变化产生感应电动势(EMF)。 这种感应电动势也被称为反电动势(BEMF),BEMF保护电动机免受过电流,并降低电动机的功耗。
根据公式(1)计算BEMF的值
(1)
u感应电动势,L - 电感系数,i - 绕组电流,t - 时间。
如图10所示,大图中的波形是绕组电流的变化趋势,小图是波形上一点放大后绕组电流与PWM信号的比较。 波形呈现出PWM信号的绕组电流锯齿变化。 根据公式(1),对于电压稳定的驱动方式,采用PWM信号的驱动方式会产生更大的BEMF,从而更有效地降低步进电机的功耗。
图10绕组电流与PWM脉冲的关系
结论
本文提出了一种步进电动机的设计,该电动机采用PMW来调节驱动扭矩。
该设计已经过调试和测试。 其功能和特点已得到验证。
该设备将安装在卫星上。
该设计能够在其他不同的应用中重复使用,这需要可调节的速度和扭矩控制。
本设计使用FPGA实现步进电机的控制并产生PWM脉冲。
参考
- 王宇,陆一淮,赵新,等:激光与红外,2015(06):663-668。(中文)
- 蒋江科,傅其斯,傅义斌,等:大气与环境光学学报,2016,11(2):103-110。 (用中文(表达)
- 通知ation on http://oap.sourceforge.net/datasheets/AN-694.pdf。
- ECSS-E-ST-33-01C,欧洲空间标准化合作。
郑列华,大邑尹新峰:红外技术,2007(01):17-21。
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[21632],资料为PDF文档或Word文档,PDF文档可免费转换为Word



