基于改进比例积分(PI)方法研究永磁同步电动机矢量控制系统外文翻译资料
2022-12-10 16:02:24

英语原文共 4 页,剩余内容已隐藏,支付完成后下载完整资料
外文文献翻译
题 目 The Study of Improved PI Method
for PMSM Vector Control System
基于改进比例积分(PI)方法研究永磁同步电动机矢量控制系统
赵凯琪
哈尔滨工程大学自动化学院
中国,哈尔滨,150001
zhaokaiqi@hrbeu.edu.cn
摘要——永磁同步电动机(PMSM)采用解耦方法可能会和直流电机有相同的性能,所以它的校准器的参数设计可以根据传统直流调节器的设计方法。然而,永磁同步电动机及其驱动转换器具有强非线性的特点,导致了设计参数和实际值之间的差异。基于速度和电流的闭环控制,提出和实现了使用空间矢量脉宽调制(SVPWM)的方法,表面贴装永磁同步电动机的仿真模型,高度模拟了现实系统。实验平台基于DSP2812给出了调节PI的原则,实验结果符合仿真结果,证明该方法可以有效地改善系统的性能。
索引词——转换器;永磁式电机;调节器;空间矢量脉宽调制;矢量控制
- 简介
永磁同步电动机使用高性能永磁材料有许多有点,如低惯性、快速响应、高功率密度、低损耗和效率高,使其拥有更好的低速特性,所以它广泛应用于伺服驱动领域【1-3】。
在矢量变换和从理论上得到直流电动机的性能后,永磁同步电动机可以解耦成转矩分量和励磁元件。所以调节器的参数通常是根据传统直流调节器的设计方法设计。然而,永磁同步电动机及其驱动转换器具有强非线性的特点,导致了设计参数和实际值之间的差异。
基于速度和电流的闭环控制,提出和实现了使用SVPWM方法,表面贴装永磁同步电动机的仿真模型,高度模拟真正的实验系统。实验平台基于DSP2812给出了调节PI的原则。实验结果符合仿真
结果,证明该方法可以有效地改善系统的性能。
- 永磁同步电动机的数学模型
根据交流电机理论,在旋转正交轴系统中永磁同步电动机的数学模型【4,5】是:
上述公式中:
矢量变换后,uq和ud是垂直轴电压和直轴电压;
矢量变换后,iq和id是垂直轴电流和直轴电流;
Pn是两机电极;
Ld和Lq是d轴和q轴的电感;
psi;f是永磁励磁磁场和电子阻扰的基本波之间的磁链。
- 基于SVPWM的永磁同步电机矢量控制系统
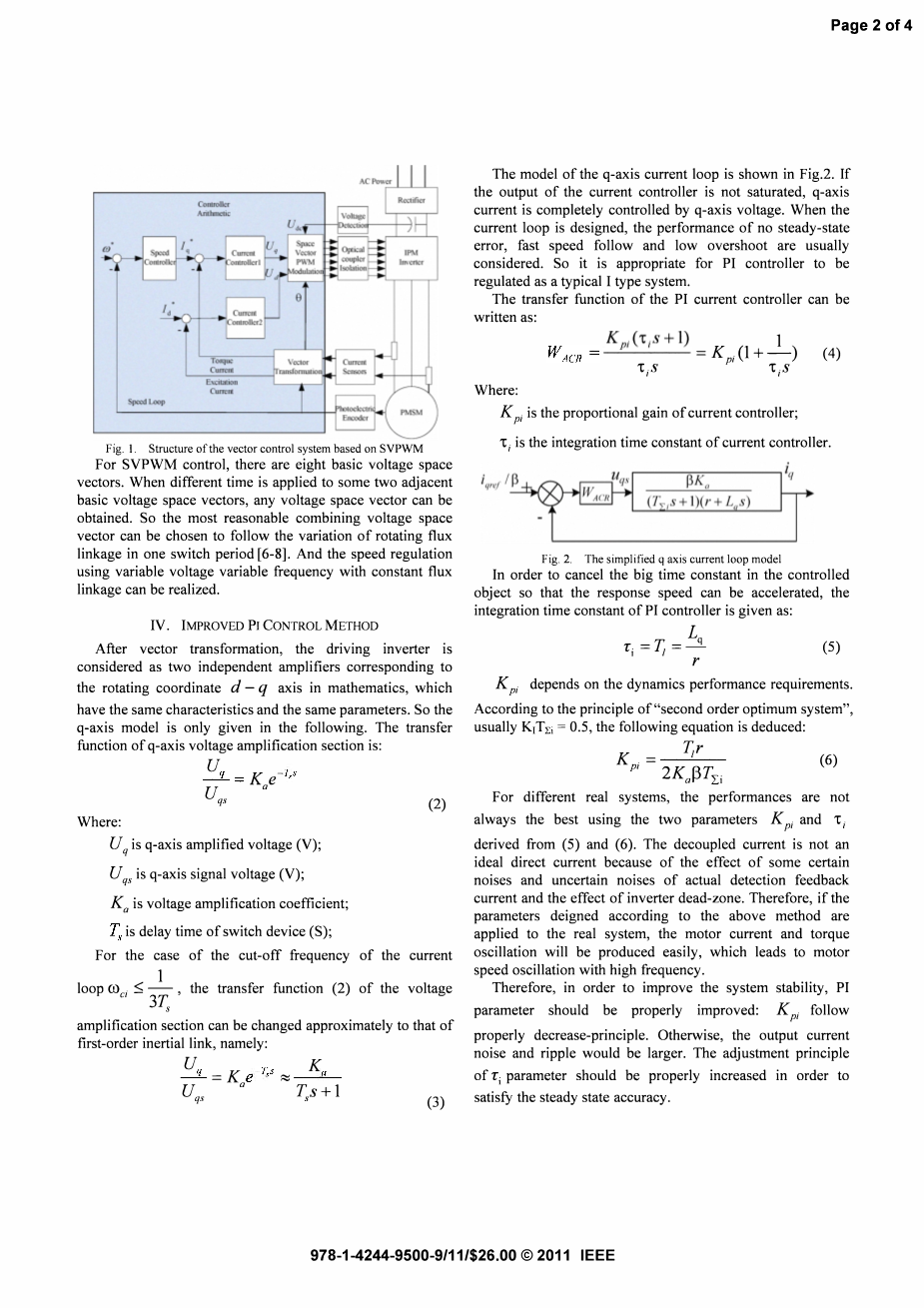
公式(1)中,通过矢量变换,根据d-q轴与转子同步旋转坐标系,永磁同步电动机驱动系统可以实现电流解耦。由于表面式永磁同步电动机在d-q轴有平等的电感,采用转子磁场定向矢量控制方法即id=0,实现最大转矩控制。基于SVPWM的矢量控制系统结构如图1所示。
图1. 基于SVWPM的矢量控制系统结构
对于SVPWM控制而言,有八个基本电压空间向量。当不同的时间点应用于某两个相邻的基本电压空间向量,就可以获得任何电压空间向量。因此,最合理的组合电压空间矢量可以选择在一个开关周期的旋转磁通联动的变化。并且使用变压变频调速实现恒磁链。
- 改进的比例积分(PI)控制方法
矢量变换后,驱动逆变器被认为是对应旋转数字坐标d-q轴的两个独立的放大器,它们具有相同的特性和参数。所以q轴的模型只在下面给出。Q轴电压放大部分的传递函数是:
在上述函数中:
Uq是q轴的放大电压(V);
Uqs是q轴的信号电压(V);
Ka是电压放大系数;
Ts是开关设备(S)的延迟时间;
在电流环戒指频率Wcile;1/3Ts的情况下,电压放大部分的函数可以改变近似的一阶惯性环节,即:
q轴电流环的模型图如图2所示。如果电流控制器的输出是不饱和的,那q轴现在的电流完全由q轴的电压控制。当设计电流环之后,它的性能通常被认为是没有稳态误差,速度快和低超调。所以对于PI控制器而言,它适合被调节成为一个I类型系统。
PI控制器的传递函数可以写成:
在上述公式中:
Kpi是电流控制器的比例放大率;
Ti是电流控制器的积分时间常数;
图2. q轴电流环的模型图
为了消除被控对象中的大时间常数,加快响应速度,PI控制器的积分时间常数为:
Kpi取决于动力学性能要求。根据“二阶最优系统”的原则,通常KpiTl=0.5,由下列方程推导出:
对于不同的实际系统,性能并不总是使用这两个参数Kpi和Tl最好。由于逆变器死区和实际检测反馈电流受到一些确定性和不确定的噪音的影响,解耦的电流不是一个理想的直流。因此,如果参数设计根据上述方法应用到实际系统中,电机电流和转矩振荡会容易产生,从而导致高频电机转速振荡。
因此,为了提高系统稳定性,PI参数应该适当改进:Kpi要遵从适当降低原则。否则,输出电流噪声和脉动会变得更大。Ti参数的调整原则应适当增加,以满足稳度和精度。
V. 系统建模
根据上述分析,我们在Matlab7.7仿真环境中基于SVPWM建立了永磁同步电机矢量控制系统的仿真模型,如图3所示。它包括速度控制器、电流控制器、SVPWM调制模块、逆变器、永磁同步电动机,检测单位等,并介绍了死区效应的SVPWM模块。
SVPWM模块的过程如下:(1)确定给定的参考向量Vsre位于哪个区域;(2)确定T1、T2相邻的电压空间的作用时间;(3)确定比较器的切换点。同时,根据图1,永磁同步电机控制系统实验平台是基于DSP2812、功率器件MOSFET、光耦隔离和驱动集成芯片。
图3. 基于SVWPM的矢量控制系统仿真
图4. 电压空间矢量脉宽调制输入参考电压U
图5. A相给定基准电压
图6. A相的定子电流
永磁同步电动机的参数是:定子电阻Rs=2.68Omega;,d轴、q轴的电感是Ld=Lq=Ls=8.7mH,转子磁链是psi;f=0.1333Wb,惯性矩是J=0.5 xl 0-4 kgm2,摩擦系数是F= 1 X 10-5 N ms,额定速度是5800r/min,额定转矩是0.2Nm,极对数P=2。
- 实验结果和分析
在仿真和实验平台上,永磁同步电机的参数是相同的。为了减少模拟时间,逆变器的开关频率 设置为3kHz。仿真结果显示在图4-图7。电流控制器的输出波形,即输入参考电压空间矢量脉宽调制码由图4可见。阶段A给定的参考电压如图5所示。图6显示了阶段A的电子定流波形。图7显示了电机转速波形。
图7. 电压空间矢量脉宽调制输入参考电压U
实验结果由图8和图11显示。电路控制器的输出波形,即输入参考电压空间矢量脉宽调制码由图8可见。阶段A给定的参考电压如图9所示。图10显示了阶段A的电子定形波流。图11显示了电机转速波形。从图4-图7的仿真结果和图8-图11的实验结果的比较,可以看出它们波形的一致性很好。它证明了所提出的系统仿真模型是非常符合实际的实验系统。
图8. 电压空间矢量脉宽调制输入参考电压U
图9. A相给定基准电压
图6. A相的定子电流
图7. 电压空间矢量脉宽调制输入参考电压U
从模拟电流的曲线和图6与图10的电流实验中来看,存在着具有不确定属性且很难过滤的噪声。因此我们提出并应用了改进PI控制的方法。从图7和图11所显示的永磁同步电机的波形速度来看,拥有平滑,超调量低,运行稳定等优点。这个系统拥有良好的稳态特性和动态特性。
- 结论
永磁同步电机可以解耦成转矩分量和励磁分量来探索矢量变换,并在理论上达到直流电动机的性能。所以它的校准器的参数设计可以根据传统直流调节器的方法设计。然而,永磁同步电动机具有强非线性的特点,导致了设计参数和实际值之间的差异。
基于永磁同步电机矢量控制系统磁链和电流闭环,与SVPWM的永磁同步电机矢量控制系统的仿真模型,实现了高度模拟真实系统。调节PI的基本原则,这已被基于dsp28l2实验平台验证。实验结果与仿真结果吻合,证明了该方法的有效性。
鸣谢
作者感谢本文文献的原始版本作者Z.W.Liu和C.P.Zhou。
参考文献
- 唐任远,《和现代永磁电机的设计理论》,北京机械工业出版社,1997.11.
- 陈继红,《我国伺服驱动产业发展的讨论》,航空制造技术出版社,.46-49,2006.8.
- 李华德,《交流调速系统》,北京电子工业出版社,171-232,2003.3.
- Scott Wade, Matthew W. Dunnigan, and Barry W Williams ,《与转子电阻辨识感应电机矢量控制的仿真模型》,495-506,1997.3.
- 王鸿,余勇,徐殿国,《永磁同步电动机的位置伺服驱动》,中国电机工程学报,151-155,2004.
- 李波,安群涛,孙冰城,《仿真研究与实现的空间矢量PWM电机控制与应用》,40-44,2006.
- 刘东亮,贺益康,《交流伺服逆变器死区效应分析与补偿新方法》,中国电机工程学报,46-50,2008.7.
- 张行,张崇巍,《PWM可逆变流器空间电压矢量控制技术的研究》,《中国电机工程学报》,21卷,102-106,2001.
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[31200],资料为PDF文档或Word文档,PDF文档可免费转换为Word



