基于奇异摄动技术的直流电机脉宽调制速度控制外文翻译资料
2022-12-17 14:44:04

英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
外文文献翻译
题 目基于奇异摄动技术的直流电机脉宽调制速度控制
院 系 自动化学院
基于奇异摄动技术的直流电机脉宽调制速度控制
Valery D. Yurkevich Nikita A. Stepanov
Automation Department
Novosibirsk State Technical University
Novosibirsk, Russia
摘要:讨论了具有自主电压变换器的直流电动机的调节问题。所考虑的控制系统由两个反馈回路组成。第一种方法是通过对像H-bridge这样的自主电压变换器进行脉宽调制控制,实现对直流电机电枢电流的控制。第二种是维持直流电机转速控制。
基于奇异摄动技术,设计了比例积分(PI)控制器,用于电枢电流和电机速度的控制,从而实现了多时间尺度运动的人工诱导。
在闭环系统中。多时间尺度运动分析允许获得控制器参数选择的分析表达式。并给出了仿真结果。
关键词:直流电机调速;直流-直流变换器;脉宽调制;PI控制器;多时间尺度运动。
一、引言
直流电机是移动机器人的关键部件,也是移动机器人的核心部件。
自主系统[1-3]有一套不同的机器人应用程序,其中有必要控制直流电机的速度,使直流电机的负载在一定的速度范围内发生变化,并要求高速控制精度和良好的动态响应。众所周知,直流电机的速度可以通过使用与电机串联的可变电阻来控制。然而,这种速度控制问题的方法会导致大量的能量浪费,其中一个会在电阻器中产生大量的热量。从能量效率和灵活性的角度出发,采用单片机实际实现,目前最广泛使用的控制直流电机转速的方法是基于脉宽调制(PWM)[4-6]。
通过使用脉宽调制,可以很容易地控制输送到负载的平均功率,从而有效地提供所需的直流电机转速。为了实现脉宽调制技术,直流电机应配备电压变换器,如H桥。在控制系统设计中,应考虑直流-直流电压变换器(H桥)脉宽调制控制的特殊特点。尽管直流电机的脉宽调制控制器在工业上得到了广泛的应用,但该领域最新的出版物大多与实际的硬线实现、计算机模拟和实验结果有关[7-10]。
有一套专门研究控制设计方法的研究工作,如直流电机滑模控制[11]、基于优化技术的直流电机控制[12]、模糊逻辑控制器设计方法[13]、Ziegler-Nichols方法。然而,控制律结构的合理性、控制器的设计方法、控制器参数的整定等理论问题却包含着大量尚未解决的问题。
本文讨论了级联控制系统的结构[7],其中在第一控制回路中提供了直流电机的电枢电流控制。第二种是维持直流电机的速度控制。在[11]中可以找到级联控制系统结构的另一个示例,其中提出了控制直流电机转速的滑模控制设计方法。
本文提出了一种基于脉宽调制的电枢电流控制回路的开关控制策略,并考虑了在高频采样条件下变结构控制的滑模与脉宽调制控制响应之间的等效性,其中假定脉宽调制控制器不是饱和,采样频率足够高,使得不连续控制系统的响应符合平均模型,其中控制变量由连续时间占空比函数表示。
本文基于奇异摄动技术选择内外控制回路比例积分(PI)控制器的参数,其中两个时间尺度运动是在闭环系统中人为诱发的。通过奇异摄动方法对闭环系统特性进行分析。时间尺度分离技术在闭环系统分析中的优势在于可以方便地导出控制器参数的解析表达式。
论文的组织结构如下。首先,讨论了控制回路中采用脉宽调制的级联控制系统结构。
其次,介绍了H桥电压变换器电枢电路的菲利波夫平均模型和附加低通滤波的PI电枢电流控制器。采用奇异摄动技术设计。第三,基于所讨论的双时标设计方法,设计了外直流电机速度控制器。最后,仿真结果所设计的控制系统包括以下内容,据电机转速提供所需的瞬态性能规范。
二、控制问题说明
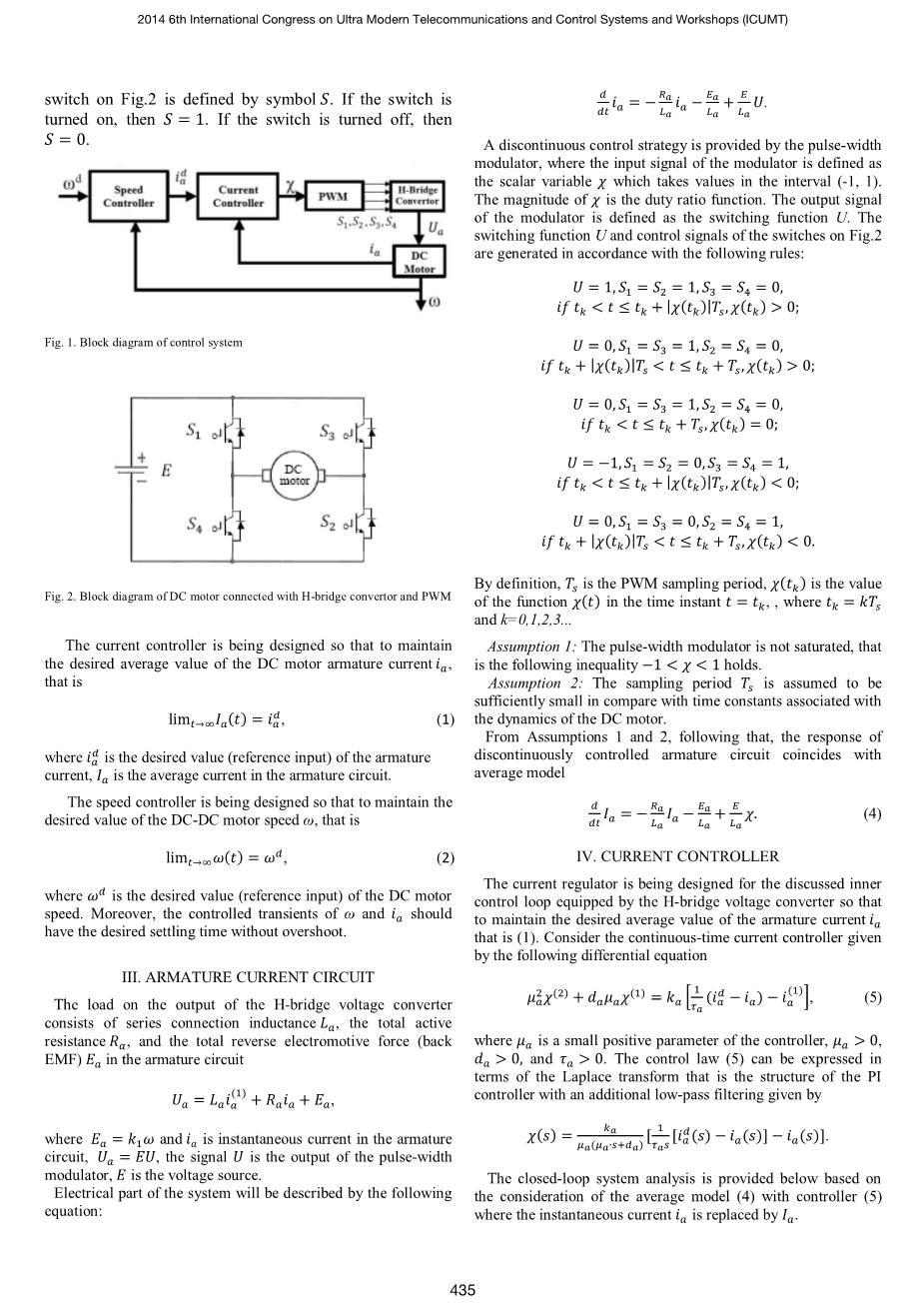
所讨论的控制系统由两个反馈回路组成,如图1所示。在第一种中,直流电机的电枢电流控制是通过脉宽调制来实现的,二种是维持直流电机的速度控制。电枢电流和电机转速的控制器都是基于奇异值设计的。
在闭环系统中人为地引起多时间尺度运动的摄动技术。直流电机与H桥变换器和脉宽调制相连接,如图2所示,图2上各开关的控制信号用符号表示。如果开关打开,则。如果开关关闭,则。
图1
图2
电流控制器的设计是为了保持直流电机电枢的期望平均值,即
(1)
其中是电枢电流的期望值(参考输入),是电枢电路中的平均电流。
速度控制器的设计使其保持直流-直流电机速度的期望值,即
(2)
其中是直流电机转速的期望值(参考输入)。此外,的受控瞬变应具有理想的稳定时间,无超调。
三、电枢电流回路
H桥电压变换器输出端的负载由串联电感、总有功电阻和电枢电路中的总反电动势(反电动势)组成。
式中,是电枢电路中的瞬时电流,,信号是脉宽调制器的输出,是电压源。
系统的电气部分将用以下方程式描述:
脉冲宽度调制器提供了一种不连续的控制策略,其中,调制器的输入信号被定义为在区间内取值的标量变量(-1,1)。
的大小是占空比函数。调制器的输出信号定义为开关功能。图2上开关的开关功能和控制信号按照以下规则生成:
根据定义,是脉宽调制采样周期, ()是函数chi;(t)在时间瞬间的值,其中,
假设1:脉宽调制器不饱和,即以下不等式保持不变。
假设2:与直流电机动力学相关的时间常数相比,假设采样周期足够小。
由假设1和假设2可知,不连续控制电枢电路的响应符合平均模型
(4)
四、电流控制器
电流调节器是为所讨论的由H桥电压变换器配备的内部控制回路而设计的,以保持所需的电枢电流平均值。这是(1)中公式。考虑以下微分方程给出的连续时间电流控制器
(5)
其中是控制器的一个小正参数,gt;0、gt;0和gt;0。控制规律(5)可以用拉普拉斯变换来表示,拉普拉斯变换是PI控制器的结构,通过以下公式给出了附加的低通滤波:
基于控制器(5)的平均模型(4),将瞬时电流替换为控制器(5),下面给出了闭环系统分析。
用方程(4)的右成员替换(5)中的,式中取和,得出平均闭环系统的形式。
(6)
由于是小参数,上述方程(6)是奇摄动微分方程。因此,在闭环系统(6)中,快速和慢速模式被人为地强制为→0。表示
这些模式之间的时间刻度分离程度取决于参数。从(6)开始,平均快速运动子系统(FMS)
(7)
其中被视为期间的冻结变量。
备注:选择增益以使在条件gt;0在gt;0和gt;0下保持,从而提供(7)的FMS瞬态稳定性。
假设选择了控制律参数、和,使得FMS(7)稳定,并且在闭环系统(6)中保持时间尺度分解。例如,
然后,FMS(7)特征多项式由
(8)
从(6)式中,平均的慢动作子系统(SMS)通过给定
(9)
结果中,参数根据平均电枢电流的期望稳定时间选择。
通过选择参数使条件保持在系统(6)中,其中是快速和慢速模式之间的时间刻度分离度,例如ge;10。
五、直流电机速度控制器
用微分方程系统描述了直流电机电枢电路和机械部分的平均模型。
(10)
式中为转动惯量,为外负载力矩,。因此,负载扭矩被认为随电机转速变化而变化。
假设带控制器(5)的系统(4)中电枢电流的瞬变比速度的瞬变快得多,因此要求(1)成立。因此,取,为了电机速度控制器的设计,而不是(10),将处理以下直流电机的简化模型
(11)
其中被视为电机速度反馈回路的新控制变量。
直流电机速度控制器的设计目的是保持电机速度的期望值,即(2)。考虑以下微分方程给出的连续时间电机速度控制器
(12)
其中为控制器的小正参数,gt;0,gt;0。
控制律(12)可以用拉普拉斯变换表示,拉普拉斯变换是由
在考虑带控制器(12)的简化模型(11)的基础上,给出了闭环系统分析。用(11)的右成员替换(12)中的,得到闭环系统。
(13)
方程组(13)是一个奇摄动微分方程,其中快模和慢模被人为地强制为→0。这些模式之间的时间尺度分离程度取决于参数。
从(13)开始,快速运动子系统(FMS)
(14)
结果,其中被视为冻结变量。
假设选择了控制律参数,使,则FMS(14)特征多项式由下式给出:
(15)
由(13)可知,平均慢动作子系统(SMS)由下式给出:
(16)
所以,在阻尼(14)的快速瞬变之后,我们得到(13),慢运动子系统(16)。因此,电机速度的行为由稳定参考方程(16)规定,并由此维持要求(2)。
注意,两个控制回路之间的时间刻度分解通过选择控制器参数来保持,这样保持不变。
六、闭环系统仿真
直流电机参数如下:
1500V, 0.0015,0.16,
,=0002
脉宽调制器的采样周期选择为00001s。根据上述设计方法,选择了以下控制器参数:
0.001s, 2,0.01s,,
0.1s, 1s, 5.44。
所以,我们有
,,
模拟结果显示在图3-8,其中模拟结果证实了分析计算。
图3模拟结果:和(rad/s)的曲线图
图4模拟结果:(A)图
图5仿真结果:图
图6模拟结果:图
图7模拟结果:U图
图8模拟结果:图
为了说明时间尺度分离度减小对闭环系统行为的影响,在图中给出了仿真结果。图9–14,其中控制器参数选择如下:
,
所以,
图9模拟结果:和(rad/s)的曲线图
图10模拟结果:(A)图
图11仿真结果:图
图12模拟结果:图
图13模拟结果:U图
图14模拟结果:图
从图3和图9的比较可以看出,时间尺度分离度的降低会导致输出瞬态行为的性能下降。
其他模拟结果如图所示,图15–20,其中所需的电机转速值从70 rad/s阶跃变化为-70 rad/s,控制器参数选择如下(与图(3-8)中的值相同)。
,
所以
图15模拟结果:和(rad/s)的曲线图
图16模拟结果:(A)图
图17仿真结果:图
图18模拟结果:图
图19模拟结果:U图
图20模拟结果:图
七、结论
本文所提出的奇异摄动技术在H桥电压变换器直流电机控制器设计中的优势在于提供了所需的电机转速瞬变。随着时间刻度分离度的增加,可以提供更高精度的理想输出瞬态参数。另一个优点是推导了控制器参数选择的解析表达式,其中控制器参数明确取决于电机转速。
八、确认
这项工作是由俄罗斯基础研究基金会(RFBR)资助的第14-08- 01004号和由新西伯利亚国立技术大学在战略移动性资助下的战略发展计划。
参考文献
[1] Power Electronics Handbook, Ed. by Muhammad H. Rashid, Academic Press, 2001.
[2] R.W. Erikson, M. Dragan, Fundamentals of Power Electronics, Springer, 2-nd ed, 2001.
[3] J. Lovine, Robots, androids, and animations, McGraw-Hill, 2001.
[4] J. Holtz, “Pulsewidth modulation: a survey,” IEEE Trans. Industrial Electronics, 1992, vol. IE-39, no.5 pp.410-420.
[5] S.D. Barman,
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[20493],资料为PDF文档或Word文档,PDF文档可免费转换为Word



