动车组网侧变流器的动态性能优化的自抗扰控制算法研究毕业论文
2020-03-23 09:31:39
摘 要
随着人口膨胀,我国各大城市的流动人口数量日渐增长,在这巨大的人口流动中,高铁动车组占据着不可替代的重要作用。而我国人口庞大,这带给铁路运输更大的压力,这就需要对动车组的牵引传动系统有比较深入的研究,而网侧变流器作为动车组牵引系统的重要组成部件,是减少铁路电网谐波污染,动车组安全运行的重要保障。
本文以我国的和谐号动车组网侧变流器为研究对象,旨在提高其控制系统动态响应性能,通过分析其工作原理和数学建模,对常用算法瞬态直接电流控制以及DQ电流解耦控制进行比较,结合自抗扰控制,分析在负载突变的情形下各个算法的动态响应性能,比较各条件下的优势与不足。
建模仿真阶段使用Matlab工具分别搭建了在PID/自抗扰控制下的网侧变流器模型,并在负载突变情况下比较分析,发现结合自抗扰控制算法具有较好的动态响应能力。
关键字:网侧变流器;瞬态直接电流控制;DQ电流解耦控制;自抗扰控制;Matlab仿真
Abstract
With the expansion of the population, the number of floating population in the big cities of our country is increasing. In this huge population flow, the high speed rail EMUs occupies an irreplaceable important role. The large population of our country brings greater pressure to the railway transportation, which requires a more in-depth research of the traction drive system of the EMU, and the grid-side converter is an important component of the EMU traction system, which is an important guarantee for reducing the harmonic pollution of the railway power grid and the safe operation of the EMUs.
The purpose of this paper is to study grid-side Converters of EMUs of CRH series in China, aiming at improving the dynamic response of the control system. By analyzing its working principle and mathematical modeling, the transient direct current control and DQ current decoupling control are compared, and with active disturbance rejection control, the dynamic response performance of each algorithm in the case of load mutation is analyzed, and the advantages and disadvantages of each condition are compared.
In the modeling and simulation stage, the tool of Matlab is used to build the grid-side converter model under PID/active disturbance rejection control, and it is compared and analyzed in the case of load mutation. It is found that the algorithm of active disturbance rejection control has better dynamic response ability.
Key words:grid-side converter;instantaneous current control;DQ current decoupling control; active disturbance rejection control;Matlab simulation
目录
第一章 绪论 1
1.1 课题研究背景及意义 1
1.2 国内外研究现状 2
1.3 本文主要研究内容 4
第二章 动车组网侧变流器及其控制技术研究 5
2.1 动车组网侧变流器物理模型及工作原理 5
2.2 网侧变流器电路分析 6
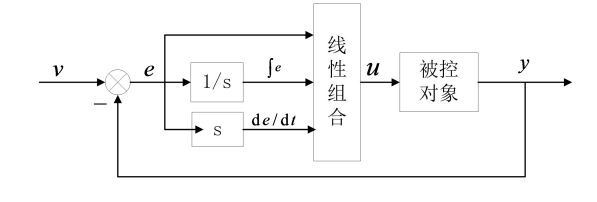
2.3 PID控制 8
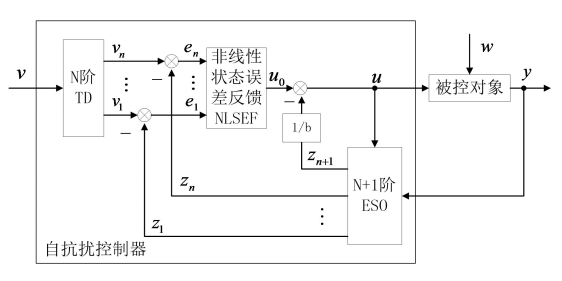
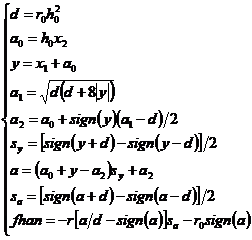
2.4 自抗扰控制技术 9
2.5 本章小结 15
第三章 动车组网侧变流器控制算法 16
3.1 瞬态直接电流控制算法 16
3.2 DQ电流解耦控制算法 17
3.3 基于自抗扰控制的瞬态直接电流控制算法 20
3.4 本章小结 23
第四章 动车组网侧变流器控制算法建模仿真 24
4.1 控制算法数学模型 24
4.2 仿真实验 26
4.3 本章小结 27
第五章 结论与展望 28
参考文献 29
致谢 31
- 绪论
1.1 课题研究背景及意义
经济发展,随之而来的就是交通运输网络发展,国家重点发展的目标在渐渐地聚焦于高速铁路。从过去的蒸汽机到如今的电力能源,还有电力车的牵引从直流系统发展至如今的交流系统,现如今,高速铁路交流型电力系统已经占据了绝大部分的市场。虽然我们在不断优化改善高速铁路,但也不断出现了越来越多影响动车组列车安全运行的因素,比如牵引网谐振、网压波动、网压闪变等等,严重威胁动车组列车的正常安全稳定运行。作为连接动车组以及牵引电网的能量交换部件,网侧交流器之于整个电力牵引系统,对乘客的旅程有着非常重要的作用,故此有进一步深入研究动车组网侧变流器安全控制的必要,以此来对动车组列车和牵引供电网运行的稳定安全进行改善和提高。
我国人口众多,人民生活节奏不断变快,客流量大造成了交通运输的巨大压力,其中铁路运输更是在其中承担着相当可观的一部分。我国正面临机遇期,经济高速发展、社会和谐稳定,为使国家社会长治久安,繁荣昌盛,最近几年,为了提高铁路系统的载客能量,强化其各项性能指数,高速铁路建设正是我国积极努力,全力发展的大方向。学习海外先进技术和知识,领会其创新思想本质,取其精华而去其糟粕,培养熟练掌握核心关键技术并能够不断地创新的人才,使我国的动车组科技立于世界巅峰。自2007年起,CRH系列动车组已经开始相继地被投入运行中,尤其是江浙沪等沿海发达地区,已经极少得能看到过去绿皮火车的身影,高速铁路使用的几乎都是高速列车,其时速在250公里以上,且均配备交流传动系统[1]。优异性能的交流传动系统,需要配备合适的外部电源,若是动车组电网无法紧密配合,则电压震荡、传动系统无法维持稳定以及供电系统谐波谐振等情况都有可能频繁发生,从而导致电压电流过大,损坏设备并极度干扰正常运输秩序。
当今世界轨道交通目前的主流电力牵引手段是由变压器、牵引变流器、受电弓、网侧变流器、电机等部分共同组成,由于其高效率并且节能环保,以及维护修理成本低的优点,广受好评。
网侧变流器,一种PWM整流器,作为高速列车牵引系统的重要组成部分。由于是由牵引变压器供电的,它使动车组与动车组牵引网之间的能量相互作用,减少铁路电网谐波,确保一个稳定的高速列车安全运行。其工作特性决定了动车组负荷特性。在动车组运行的过程中,其牵引传动控制有着很重要的作用,其中是对网侧变流器的控制,它深刻影响着网侧谐波。故而,对提高我国电能的利用效率的相关技术进行更深入的研究是非常有必要的,同时这也有助于电力机车的运行安全,长此以往,更是能够安定社会,降低事故发生率,促进和谐经济社会的发展,对地球资源的可持续利用作出巨大贡献。传统的网侧变流器,由最初的不控整流(由二极管实现控制),一直到相控整流(由晶闸管实现控制),都会造成牵引电网中出现极多的谐波,并且也无法维持网侧单位功率因数至目标参数。随着制造业的发达,功率器件制造也在不断进步,与此同时,电力电子技术也是蓬勃发展,所以在电力牵引系统中,网侧变流器也可以结合载波脉宽调制技术(Carries Based Pulse Width Modulation,CBPWM),能够做到控制功率因数,稳定直流电压,减少谐波并且双向能量流动,是现在网侧变流器的主流。
1.2 国内外研究现状
直流电机传动第一次被应用于上世纪1960年前后的轨道运输中,之后更是被各界广泛使用,但是在使用的过程中发生了一系列的故障和事故,让人们逐渐意识到直流传动仍然存在着缺点与局限性,如直流换向的限制、高成本的日常维护、电机输出受阻且提升空间有一定的限度等难题有待改进和解决,这些难题让轨道交通的发展停滞了相当长的一段时间。不过值得庆幸的是 ,随着1979年交流传动机车的开发,长期以来困扰着人们的瓶颈被突破了。至上世纪1990年,交流传动技术成为了研究的中心并迅速占领了很大一部分的运输市场[2]。而电力电子器件技术的发展,更是使得这项技术有了飞跃性的进展。同传统的传动技术相比较,这项新的技术有着不可比拟的优势,比如它的设备质量变得轻便了,而且这丝毫不影响其性能,它能够达到两倍的转速和功率输出,同时也降低了制造成本以及由此而来的维修成本,也减少了维修量。在同相位的情况下,交流能够使功率因数近似于1。在发生故障的情况下,由于其具备的再生制动功能,可以使电能反哺至电网,不会造成大量的能耗损失。有了这些优势,传统传动系统必然会被逐步取代,交流传动系统必将成为我国乃至世界电力机车的未来,它的发展决定着将来运输业辉煌。作为动车组交流传动系统的核心,网侧变流器的作用是牵引电网电流由交流电整合成直流电,然后再传输到传动系统,提供给逆变电路稳定的直流电压,若是其结构不合理,控制方法拙劣,将极有可能造成输出不稳定、从而影响整个交流传动系统的正常工作。二极管或晶闸管相控整流电路是传统的整流电路经常采用的,由于其谐波成分较大,会引起电网污染,而且在发生制动或故障时能量不会反馈回电网,会造成损耗。除此之外,这种传统电路低能量利用率,低运行速度,高维修成本,在实际运行中会出现各种各样的问题。因此,如何解决这些问题,开发一个低成本,低污染,高效率的变流器变成了一个现实。现有的有一种电压型PWM(Pulse width modulation)整流器被广泛应用,同传统的整流器相比,其主要优势为:
(1)四象限运行,因此能够在列车发生故障或者紧急制动时将电能方向流回电网,而不会造成浪费;
(2)正常运行时,由于其低谐波成分,接近于1的功率因数,能够有效地提高能量的利用率,减少消耗成本;
(3)使输出的直流电压稳定,从而能够保证负载的正常工作。
在这些优势的影响下,PWM整流器被广泛应用于铁路运输领域。
二十世纪八十年代,研究PWM变流器的控制策略的项目开始如火如荼的进行。在1982年,三相桥交流器拓扑结构和电流幅相控制策略被Busse Alfred等人提出[3]。1984年,无功补偿器控制策略被Akagi Hirofumi等人提出[4]。二十世纪八十年代末,整流器的离散动态数学模型与控制方法被A.W.Green等人提出[5]。1990年至今,PWM变流器快速的发展,其控制技术不断发达。控制策略能够在很大程度上影响网侧变流器在运行状态下的情况。当今世界,动车组网侧变流器控制策略如下几种:
(1)定时瞬时值电流控制,针对滞环电流控制开关频率不固定,通过限制由于滞环控制而出现的驱动信号开关频率[6];
(2)滞环电流控制,比较网侧电流的实际值和给定值生成主电路开关通断控制的PWM控制信号[7];
(3)预测电流控制,周期平均化PWM变流器瞬态控制方程,控制电网电流并维持开关频率[8];
(4)瞬态电流控制,比较输出和反馈的直流电压,以PI控制直流输出与交流输入的功率平衡[9];
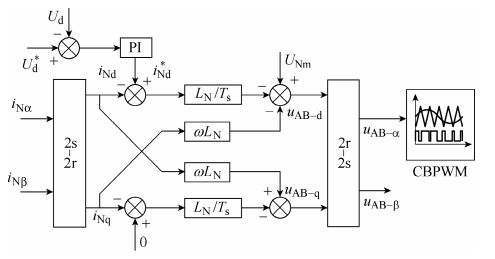
(5)间接电流控制,即幅相控制,J.W.Dixon和B.T.Ooi提出,对变流器输入端电压幅值与相位进行调节,从而对网侧电流进行控制[10];(6)直轴交轴电流解耦控制,又可称为DQ电流解耦控制,通过转换坐标系,电路的各种信号被转换成有功和无功分量,经由闭环控制调节至给定值[11,12]。
然而,这些控制策略也存在各种各样的缺陷。其中例如:简接电流控制,在没有电流控制环的情况下,动态响应时间长其抗干扰的性能低下;瞬态电流直接控制,虽然其动态响应时间长,但稳态误差频繁发生;直轴交轴电流解耦控制,有电流延时,不利于系统动态变化。
现今网侧变流器的研究主要在[13]:
(1)网侧变流器的建模:网侧变流器的数学模型是其研究的基础,一些模型,如时域模型、小信号模型等在各国的学者对变流器的研究中建立了起来[14,15]。
(2)网侧变流器的控制策略:网侧变流器控制策略主要有直接和简接两种形式。由于直接的方式响应时间短,效果明显,渐渐取代了间接方式[16,17]。
(3)网侧变流器的主电路拓扑结构:电流型变流器与电压型变流器为网侧变流器的主要结构。根据不同的功率场合,网侧变流器的结构得使用自单个升级至多个,自两电平升级至多电平的组合。1977年,德国学者Holtz设计了三电平整流电路,日本学者A.Nabae在此基础上改进并设计了二极管箝位的改进方案,后来在各种电路中被逐渐应用。
(4)控制策略:随着不断发展控制理论与计算机,变流器中不断应用了各种新的控制方法,如智能控制、状态反馈控制等。
(5)新器件:电力电子器件的发展时刻影响着网侧变流器的发展,电子器件的电压等级以及开关频率会直接决定网侧变流器发展的未来性与应用的可能性[18,19]。电力电子技术的迅速发展,那么对于电能质量也会有更进一步的要求,会更加广泛地应用于PWM变流器。
1.3 本文主要研究内容
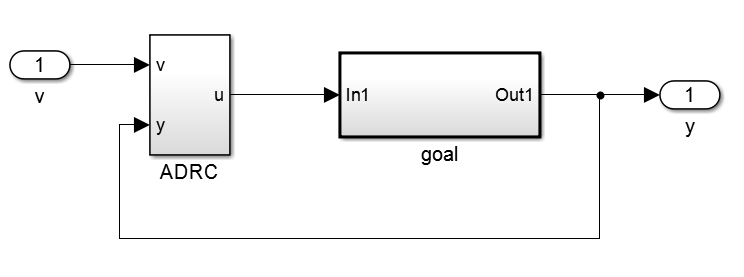
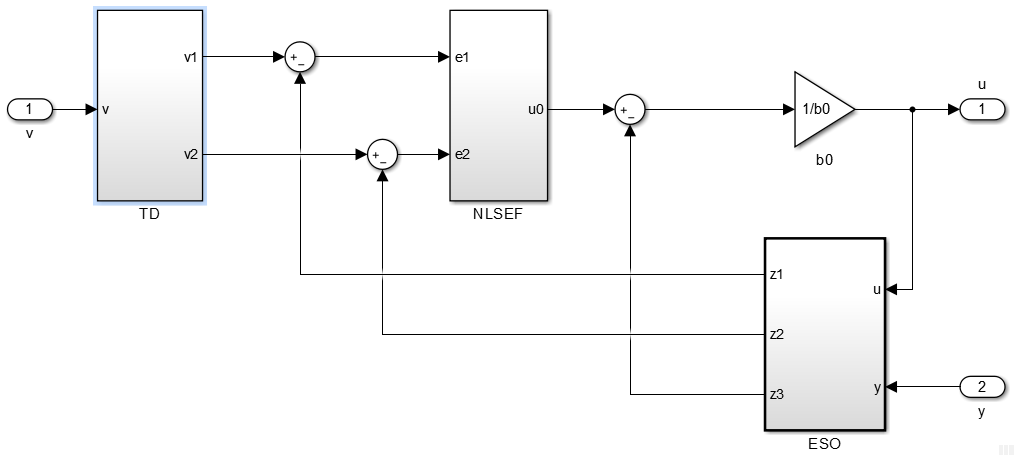
本文主要对我国CRH 系列动车组网侧变流器的动态性能优化控制算法策略进行研究。理解网侧变流器数学及物理模型、工作原理,构建电路模型,研究其瞬态直接电流控制和DQ电流解耦控制算法。学习韩京清先生提出的自抗扰控制技术,理解其原理并架构模型,结合两种算法建立完整的自抗扰控制下的网侧变流器模型,与PI控制下的情况作对比。本文的研究中心为:
(1)动车组网侧变流器模型的建立;
(2)学习自抗扰控制技术并运用于网侧变流器;
(3)在各控制算法下分别搭建动车组网侧变流器控制模型;
(4)在负载突变的情况下,比较各算法控制下的动态调节能力,分析其性能。
- 动车组网侧变流器及其控制技术研究
2.1 动车组网侧变流器物理模型及工作原理
变流器基本上都采用单相四象限整流器,也可以称为PWM整流器,主要有两种拓扑结构:单相两电平和单相三电平,例如单相两电平结构,如图2.1所示,其中交流侧有网侧等效电阻和网侧漏电感,带有续流二极管的IGBT器件 、
、 、
、 和
和 构成全控桥臂,直流侧为储能电容、串联电感、电容滤波结构[40],如图2.1。
构成全控桥臂,直流侧为储能电容、串联电感、电容滤波结构[40],如图2.1。
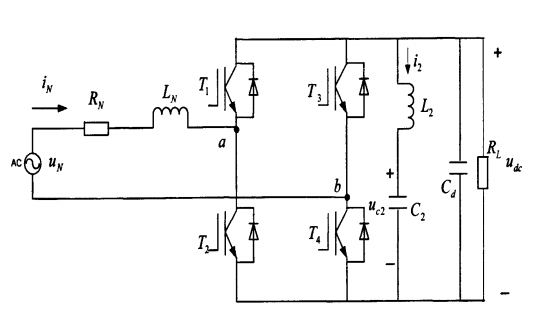
图2.1 单相两电平变流器主电路
为简化分析,针对图2.1所示的单相两电平变流器,等效为如图2.2的开关等效模型。
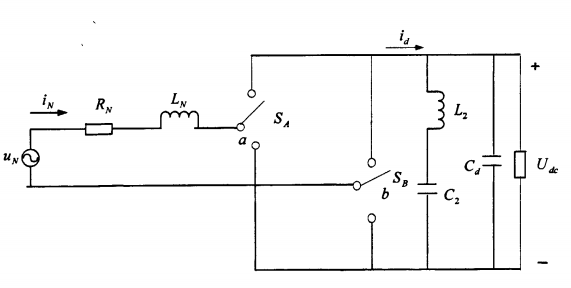
图2.2 单相两电平变流器开关等效模型
定义其理想开关函数为:

(2.1)
显然,上下桥臂不能同时导通,其驱动信号应该互补。开关函数
 有4种不同组合,即
有4种不同组合,即 。变流器输入端电压
。变流器输入端电压 有三种不同值即直流侧电压
有三种不同值即直流侧电压 、0、
、0、 ,且可表示为:
,且可表示为:
(2.2)
因此,电路4种工作模式如表2.1所示
表2.1 单相两电平变流器工作模式表
工作模式 | Ua | Ub | Uab |
SA=0 SB=0 | Udc | Udc | 0 |
SA=1 以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。 相关图片展示:
您需要先支付 80元 才能查看全部内容!立即支付
最新文档

|