IPMSM高频方波注入法无传感器控制策略研究毕业论文
2020-04-08 14:25:45
摘 要
Abstract II
第1章 绪 论 1
1.1 研究目的和意义 1
1.1.1研究意义 1
1.1.2研究目的 3
1.3 国内外的研究现状 4
1.3.1 IPMSM控制策略研究现状 5
1.3.2 高频方波注入法控制策略的研究现状 6
1.3 研究内容 7
第2章 数学模型 8
2.1 d-q坐标系模型 8
2.2 3/2变换模型 9
2.3本章小结 11
第3章 仿真研究 12
3.1结构框图设计 12
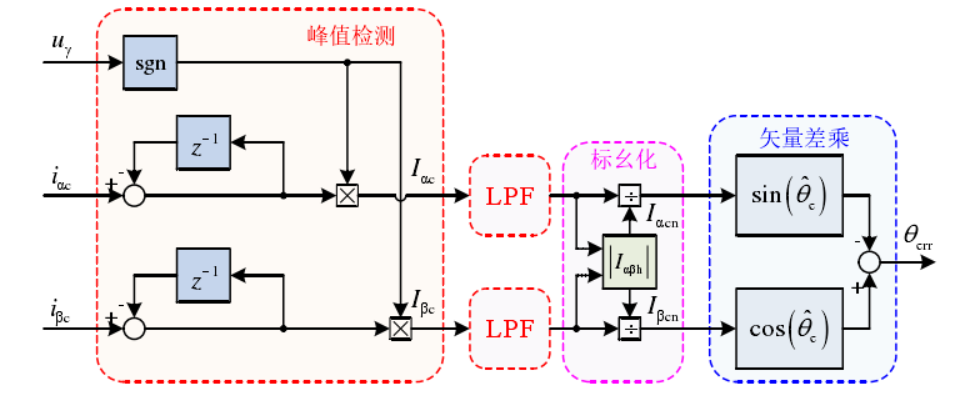
3.1.1位置误差信号解耦框图设计 12
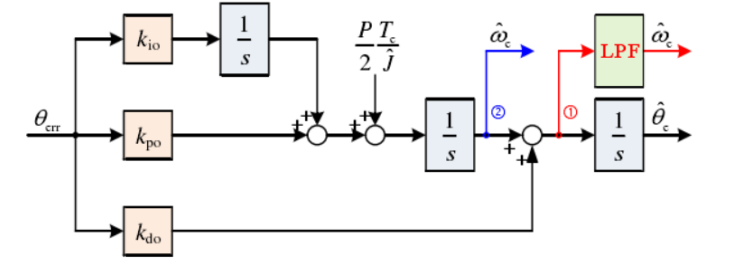
3.1.2位置跟踪观测器的实现 14
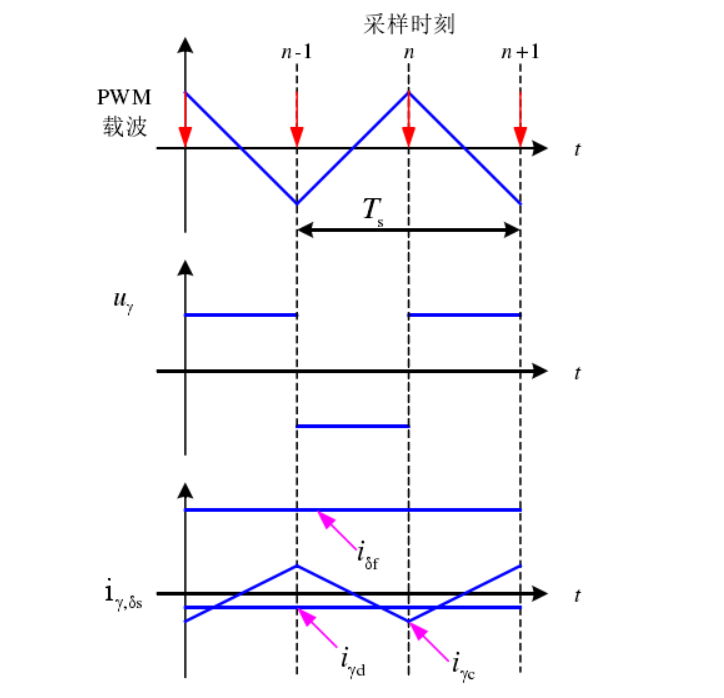
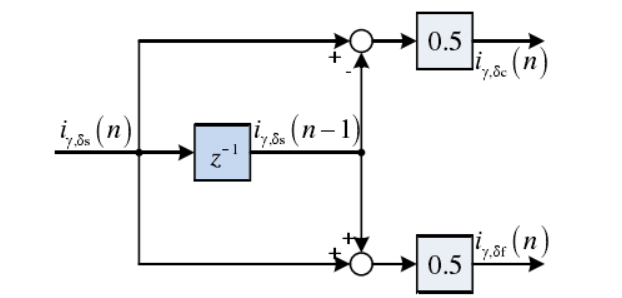
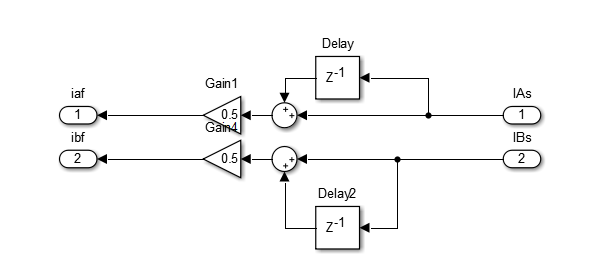
3.1.3载波信号分离模块 16
3.2 系统仿真模型搭建 19
3.3仿真调试 21
3.4仿真结果分析 23
3.5 本章小结 24
第4章 总结与展望 25
致谢 26
参考文献 27
摘 要
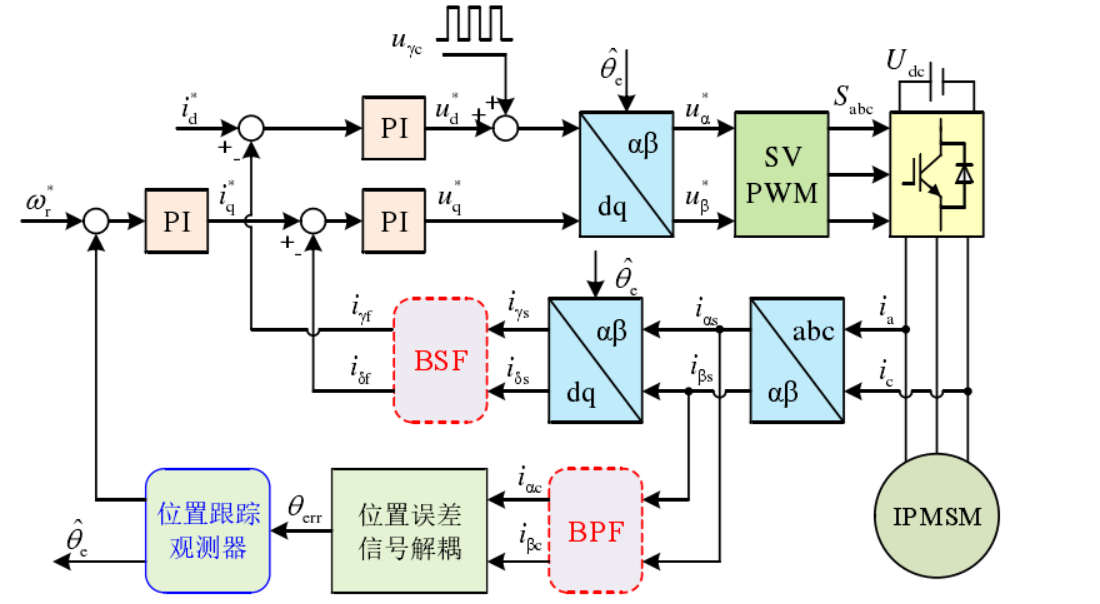
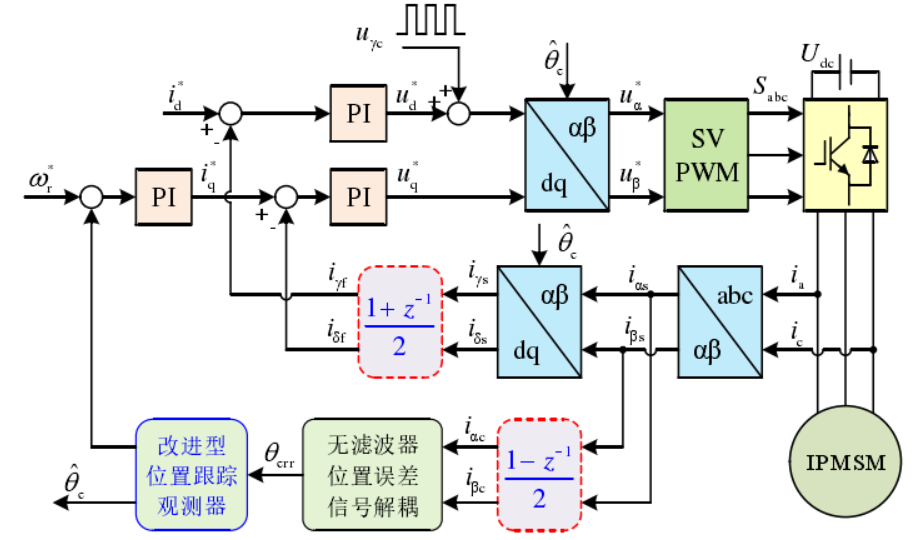
永磁同步电机具有结构简单,体积小,重量轻等特点,具有优异的性能,在各个方面应用广泛。基于高频方波注入法无位置传感器的控制策略丰富多样,各自有自己的特点,也存在一些有待改进的地方。在高频方波注入法中,我们将传统需要使用滤波器的方法改进为无滤波器位置误差解耦,通过对定子电流信号进行解耦后直接采取代数运算的方式实现转子位置与速度的精确定位,以解耦出的位置信息结合目前比较先进的电动机双闭环控制策略进行速度与转矩的控制,其次对于改进后的高频电流分离方法,需要采用配套的方法进行解耦,得到最终所需要的角度与角速度信息,最终将角度信息与设定信息进行运算得到控制系统的输出,从而控制电动机。
关键词:无传感器,位置解耦,永磁同步电机,无滤波器。
Abstract
Permanent magnet synchronous motor (PMSM) has many advantages such as simple structure, small volume and light weight. It has excellent performance and is widely used in all aspects. High frequency square wave injection based position sensorless control strategy is rich and varied, each has its own characteristics, and there are still some areas to be improved. In the high frequency square wave injection method, we have improved the traditional filter based method to decouple the position error of the filter without the filter. Through the decoupling of the stator current signal, the position and speed of the rotor are accurately located by the method of algebraic operation, and the decoupled position information is combined with the more advanced electric power. The dual closed loop control strategy carries out the control of speed and torque. Secondly, for the improved method of high frequency current separation, it needs to be decoupled by a matching method to get the desired angle and angular velocity information. Finally, the angle information and the set information are calculated to get the output of the control system, thus controlling the electric power. Machine.
Key words: sensorless, position decoupling, permanent magnet synchronous motor,
no filter.
第1章 绪论
永磁同步电机拥有绝佳的有点,很多性能都非常优越,无论与交流电机相比还是与平台直流电机相比,IPMSM都有其独特的优势,不仅如此,由于我国稀土资源非常丰富,所以利稀土资源得到的永磁同步电机在我国具有非比寻常的战略意义,大力发展永磁同步电机控制技术并用于电机的控制当中,对我国来说具有很高的价值。
IPMSM的应用已经取得很好的实际应用效果,且具有很高的社会价值和经济价值,在高精度调速领域,IPMSM具有不可替代的作用,从这方面考虑来看,我们也很有必要搭理发展永磁同步电机的控制策略研究。在精准调速领域,机器人领域等,都得到了许多的运用。
基于IPMSM高频方波注入法无传感器控制策略的研究在国内外已经有长足的发展,各种控制策略,控制方法层出不穷,各有优势,也各有不足。高频注入法具有许多的种类,仅仅从注入信号的类型来说,我们可以将这种信号分为高频电压信号与高频电流信号,高频电压信号我们又可以将其分为几种不同的类型,第一种类型就是旋转高频电压信号,其次还有脉动高频电压信号。对于那些哪些凸极性比较小的表贴式永磁同步电机我们主要是使用高频脉诊电压注入法,它主要是通过对电机的d轴注入高频信号然后利用电机自身的饱和特性来得到观测速度。对于凸极性比较强的IPMSM来说更适合用高频方波注入法或者高频正玄波注入法进行转子位置观测。在高频方波注入法的控制策略的研究过程中,我们需要利用滤波器进行有用信号的分离,将定子的电枢电流与注入的高频信号进行分离的过程中大部分模块需要用到滤波器,而由于滤波器本身的一些特性,特别是低通滤波器,需要用到电感等原件,将导致信号脉宽变小,系统性能降低等等一系列问题。而针对这些问题,本文将致力于研究一种不需要滤波器的信号分离策略,从而达到增大系统带宽,增强系统功能的目的。
1.1 研究目的和意义
1.1.1研究意义
永磁同步电动机是一种结构比较简单、体积又小、重量也比较轻而且在能耗方面也很小的电动机。与直流电机这种比较传统的电机想比较而言,这种电机没有直流电机的换向器和电刷,这就使得这种电机不会有换向临界问题等缺点。它和异步电动机相比较起来的话,这种电动机不需要使用无功励磁电流等条件,无需对这种电机再配置无功电流产生装置,于是效率得到提升,功率因数也相应得到提高,其力矩惯量比也比其他电机要大,定子电流和定子电阻损耗也减小了很多,而且电机的转子参数可以测量、可控性也比其他电机高很多,使得IPMSM在高精度控制领域运用十分广泛;但是它也有一些缺点,与异步电机相比起来,起动困难、成本高等缺点也比较明显。同样的,这种电机和普通的同步电动机相比,IPMSM不需要励磁装置,直接采用永磁体直接产生磁场,这种结构简化了整个电机的内部结构,无需励磁电流输入,很大程度上提高控制系统的效率。永磁同步电机拥有很多优越的性能,因为电动机自身的结构优势与磁场结构,这些性能让这种电机的矢量控制系统能够很轻易拥有了一些非常好的性能,其中就包括高动态性能、高精度、大范围的调速或定位控制等等有点,又由于电机拥有这些优点,IPMSM无传感器的矢量控制系统研究无论在国内还是国外,都引起了广泛的关注。
中国地大物博,拥有非常多的自然资源,而在电机材料方面又因为我国用于制造永磁体的材料十分丰富,稀土永磁材料钕铁硼等资源在我们国家储量非常大。因此,对我国来说,永磁同步电动机有很好的应用前景,我们有必要深入研究IPMSM的控制策略,进一步提高控制水平。
永磁同步电机具有很多优越的性能,因为永磁电动机的功率密度大、效率也比较高、可控性也十分优越,从而,这种电动机已经在航天推力液氧煤油火箭发动机电动燃油泵系等先进精密装置中广泛的运用起来了。因为火箭的推李变化范围得到了很大的提高,而且其混合调节的能力也得到了非常大的提升,这就导致了民用火箭的一些需要精确调速与控制的系统,在选用永磁同步电动机调速的过程中有了更高的要求,然而这对电动机来说,高精度的转子位置与转速检测对于实现高精度,高鲁棒性的控制是一种比较基础的性能。传统的控制系统普遍采用传感器,这些传感器的使用导致了很多问题,例如传感器的安装问题,调试问题以及精度与延迟等问题。传感器的采用在某种程度上已经无法满足现代高性能调速的性能要求。基于此原因,对火箭发动机燃油泵用的永磁同步电机无传感器控制策略研究拥有非常高的实用价值。所以我们非常乐意与研究IPMSM无传感器控制策略研究,这对永磁同步电机而言具有十分重要的理论意义,从国内外学者采用的无传感器方法来看,大部分国内外学者都采用的反电动势检测法来计算得到转子的位置以及转速问题。这种方法具有比较严重的问题就是在低速的时候转子位置检测而得到信息精度不高,这导致控制系统控制精度无法得到提升,所以我们有必要研究一些低速领域的转子位置检测的方法。高频方波注入法是一种利用电机自身的凸极效应,在控制信号的d轴注入高频方波,然后通过将电机转子电枢侧得到电流进行解耦,从而得到转子的位置与转速信息惊喜控制。这种方法很好的实现了电机低速领域无传感器的转子位置解耦控制问题。
1.1.2研究目的
通过对以往电机的控制方法来看,大部分需要传感器构成闭环回路来形成电机的闭环控制,这种方法造成系统臃肿,设备量较多,需要大量的成本。鉴于此问题,我们要想办法通过技术手段达到降低成本,同时不降低系统稳定性以及精度。我们此次所采用的基于电动机d-q坐标系的位置解耦算法,可以通过直接用电流电压的解耦,直接得到电机转子的位置,通过位置,我们可以构成位置电流双闭环回路控制系统,同时减少设备的投入而可以在低速时得到良好的性能。嵌入式永磁同步电动机(IPMSM)矢量控制系统具有很多优良的控制性能,其中结构简单,动态性能好,控制精度高等有点使得这种系统在高精度控制领域得到了广泛的运用,在高精度控制领域,这种电机逐渐成为的主流,虽然这种电机本身具有非常优良的控制性能,但是由于传统的大部分控制系统本身需要采用位置传感器得到电机转子的位置信息,这种传感器的应用也导致许多突出的问题,使得控制系统的性能无法得到进一步的提升,而且因为有位置传感器,所以系统无形中增加了许多安装与维护的难度,更有甚者,由于传感器的存在,系统很容易受到外界温度等干扰的影响,这就导致整个永磁同步电机控制系统的稳定性降低很多,也增加了许多的不可控性,导致系统性能无法得到提升。现在很多的原因使得我们对永磁同步电动机无位置传感器的控制策略研究拥有很高的价值。而这些控制策略中最重要的是对控制系统中电机的转子位置和转速的提取,如果我们想要我们的控制系统能够拥有更高的控制精度与控制性能,那么我们就有必须要对一些比较重要的控制模块进行分析和计算。其中无位置传感器控制策略的算法就是一种需要我们去解决的问题。为了得到我们想要的更加优良的方法,我们必须对现有的方法进行或者研发出更加有价值的控制方法。为了能够对无位置传感器的控制策略进行深入研究,我们必须使用一些方法,其中普遍使用的方法如下:第一种方法是基于数学模型直接进行计算的直接算法、第二种方法是基于反电动势然后通过解耦从而进行转速估算的方法、第三种是一种基于模型参考的自适应算法,除此之外还有一种基于状态观测器的速度估算法,所有的这些方法在很大程度上解决了系统在高速领域转子位置与转速信息提取与估计问题。但是当这些方法用于低速问题解决的时候,因为电动机模型所拥有的可观测性在很大程度上被减弱了,一些在高速领域具有优越性能的方法,当用于低速领域的时候就不在产生能够与高速领域相媲美的性能了。由于这些问题是可观存在的,所以我们就有必要去研究一些理论方法结局这些问题,以及解决系统在低速运行情况下对电机转子位置与转速的进行估计的问题,基于这些原因高频注入法就此诞生,能够做到充分利用永磁电机的凸极特性同时还可以通过注入高频信号从而顺利实现转子位置的观测。
电机的控制方法有许多,而在各种方法中,从注入方波的方法上来讲,我们可以将其分为旋转高频信号注入法和脉振高频信号注入法,前面的方法主要适用于凸极率较大IPMSM,而后面的方法不仅用于IMMSM还可用于凸极率很小或者隐极型的面贴式永磁电机控制系统的转子位置估计。一般来说脉振高频信号注入法中注入的是正弦电压信号当控制系统的转子位置观测器结构比较简单的时候,系统比较好控制,但是一旦当控制系统拥有多个低通滤波器的时候,由于低通滤波器所拥有的低截止频率特性将会严重导致观测器的带宽变小,使从而使得系统所拥有的信息丢失,给系统的控制带来不稳定因素,当控制系统自身输入控制所具有的信号频率设置得较高的时候,这一情况将会导致整个系统产生比较严重的位置估计噪声,还有可能会导致系统不稳定。基于这些原因,也为了能够解决这些问题,我们将采用基于高频方波电压注入法的转子速度和位置估计的方法,基于永磁同步电机的高频注入数学模型的基础上,对IPMSM电机的控制方法进行研究,并能够得出一些有益的结论。
IPMSM高频方波注入法无传感器控制策略研究,主要是找到一些控制永磁电动机的好的方法,通过理论与实践的结合,验证理论的正确性。本次毕设将从这些方面开始研究.
1.3 国内外的研究现状
因为内置式永磁同步电机的交直轴电感是不相等的,这种情况导致了电机从产生磁阻转矩,由于这些原因,就使得IPMSM 具有了高功率密度、高效率,强鲁棒性、利于弱磁控制等一系列优势,由于IPMSM具有这些优越的性能,使得IPMSM 在高速领域得到了广泛的应用。为了让内置式永磁同步电机自身优势能够得到充分发挥,许多学者投身于IPMSM的控制策略的研究。
模型法是一种广泛运用与中高速领域的无位置传感器控制技术,在利用电机磁链模型估计转子转速与位置信息的过程中,普遍采用的是模型法,因为这种方法不使用转子的凸极信息和其他的额外测试信号,只是利用电机模型就能够实现对控制系统中电机的转子位置与转速信息进行估计,对于使用这种方法的情况来说,它的实现方法是比较简单的,这个原因使得模型法在具有永磁同步电机的无位置传感器矢量控制系统中应用十分广泛[1,2,3]。
采用IPMSM的系统中运用了运用模型法的无位置传感器控制原理如下所示:在大部分情况下,基于模型法的电机转子位置与转速观测的方法可以分为三个部分,分别是反电动势或磁链信息观测的方法、其次就是位置误差信号解耦和位置/转速跟踪器[4]。这里具有不同的观测方法,其中反电动势或磁链信息观测方法居多,目前控制系统中比较常见的模型法主要包括以下方法:第一种方法是模型参考自适应法[5,6]、其次的方法为磁链观测器法[7]、再者为扩展卡尔曼滤波器法[7,8]以及滑模观测器法[9,10]、另外还有状态观测器法等方法[11,12]。系统中要想在系统中使用实现系统的位置误差信号收敛,我们主要需要通过将滑模观测器的结构进行改变从而达到目的,这种方法使得系统参数的变化具有,较强的稳定性[17,18];因为反馈增益矩阵结构多种多样,我们可以通过对这种增益矩阵进行合理的设计,从而使状态观测器法可以很好的实现对多种复杂工况的适应。文献[20]通过将4中不同的模型法进行对比并测试后发现,系统在稳态的情况下所产生的位置误差信号具有统一形式,并且 d轴的电压扰动和 q 轴的电感不确定性是导致系统产生位置观测误差的主要源泉。在得到反电动势或者磁链信息后,我们可以通过简单的代数运算或者三角函数运算就可以实现转子位置误差信号的解耦,从而实现系统的控制。
1.3.1 IPMSM控制策略研究现状
为了将IPMSM的磁阻转矩得到最大限度的发挥,国内外许多的研究机构和学者为了这个目标都不断的对IPMSM的MTPA 控制策略进行了深入详实的研究。在目前大量实际运用的永磁同步电机控制系统中,大多数系统都是采用最大转矩电流比的控制方法进行控制控制。从国内外目前为止,许多不错的成果每年都从国内外发表出来。其中在这方面具有代表性的科学家有意大利帕多瓦大学的 Silverio Bolognani,他的MTPA 控制策略研究在 IPMSM运用方面取得了许多比较优异的研究成果。 Seung-Ki Sul 教授也在韩国首尔大学进行了比较深入细致的研究,他的许多比较新颖的控制方法也在各大国际期刊杂志中进行发表。不仅如此,许多科研机构更是将成熟的产品投放市场,例如日本安川公司就已经有比较成熟的产品投入到市场中。但是反观国内的这方面来讲,在永磁同步电机的控制策略研究就比较不令人满意,但是还是出现了许多高校进行创新研究的场景,将参数估计与查表法结合起来的 MTPA 控制策略就是同济大学首先提出,重庆大学也在IPMSM的研究中得到许多有用的结果,比如专门针对车用 IPMSM 的改进 MTPA 控制策略等等。
(1) 直接进行公式计算的方法
电流极限圆和电压极限椭圆限制了MTPA的控制轨迹,它的轨迹是一种连接了恒转矩运行曲线切点的轨迹。对转矩方程求导是一种比较有效的传统控制方法,要想得到定子电流的d-q轴电流分量的转矩表达式只需要对定子电流信息进行导数求解。在电机的各种参数都已知的情况下,我们想要得到定子电流分量的值,只需要根据数学模型表达式,就能够计算出定子电流分量的值。这种情况下会导致系统产生很大的计算量,因为大量的公式比较复杂,让控制系统去运算,这很严重影响了系统的性能,不仅如此,这种方法还有一个特别不好的弊端,因为这些算法在电机参数固定的时候是比较准确的,但是电机是一个运动中的物体,它的各项参数都是一个范围内的值,无法保证参数不变,这就导致了实际的运行情况不乐观。在参考文献 中作者提出了一种新的控制策略,这种控制策略较以前的控制方法来看具有这些有点,第一个是运算量小,第二是实时性比较好,第三个是比较方便的用于工程实践过程中。这种算法主要是通过将 d-q 轴得到的电流信号和转矩信号的数学表达式进行线性化处理。然后将其运用拉格朗日迭代算法进行迭代处理,最后得到电机的最大转矩d-q 轴电流,这种方法在某种程度上是有一定工程实用性的。日本教授Okuma这国际性杂志上提出了一种扩展反电动势的IPMSM无传感器控制策略。这种控制策略的的方法是,先设定一个新的参数
中作者提出了一种新的控制策略,这种控制策略较以前的控制方法来看具有这些有点,第一个是运算量小,第二是实时性比较好,第三个是比较方便的用于工程实践过程中。这种算法主要是通过将 d-q 轴得到的电流信号和转矩信号的数学表达式进行线性化处理。然后将其运用拉格朗日迭代算法进行迭代处理,最后得到电机的最大转矩d-q 轴电流,这种方法在某种程度上是有一定工程实用性的。日本教授Okuma这国际性杂志上提出了一种扩展反电动势的IPMSM无传感器控制策略。这种控制策略的的方法是,先设定一个新的参数 ,它的值会跟随
,它的值会跟随 的增加而逐渐增大最后将会无限接近于
的增加而逐渐增大最后将会无限接近于  轴的电感平均值,但是由于有磁饱和因素的存在,
轴的电感平均值,但是由于有磁饱和因素的存在, 将会跟随的增大而减小,在两种信号的共同影响下, 将会在 达到一定值后,维持不变的状态,这就是使系统不受磁饱和影响的 MTPA 控制。但是这种策略有一种比较大的弊端就是它只会在电机承重比较大是时候有效,在电机负载比较轻的时候这种算法得到的误差较大。
将会跟随的增大而减小,在两种信号的共同影响下, 将会在 达到一定值后,维持不变的状态,这就是使系统不受磁饱和影响的 MTPA 控制。但是这种策略有一种比较大的弊端就是它只会在电机承重比较大是时候有效,在电机负载比较轻的时候这种算法得到的误差较大。
由于电动机的参数会在运行时不断变化,所以电机参数实时辨识策略显得格外重要,基于此原因,各种算法相继提出,自适应算法、卡尔曼滤波、最小二乘法等参数辨识方法解决了现有的大部分问题。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: