基于无位置传感器的PMSM控制策略的仿真研究毕业论文
2020-02-18 10:51:13
摘 要
工业机器人在工业高效率生产上有着非常重要的地位,作为控制机器人核心技术的运动控制系统,与机器人的大多数性能有直接联系。所以想要研究好机器人关节运动控制系统就需要对电动机运动控制进行研究。永磁电动机与异步交流电动机及直流电动机相比有体积小、重量轻和功率密度高等特点。非常符合机器人关节运行的条件。在多种无位置传感器PMSM控制策略中,本文以基于滑膜变模型的永磁同步电动机无位置控制为重点,对永磁同步电动机工作时,间接得到转子位置及速度的方法进行深入学习和研究。
本文的研究主要为:首先说明了无位置传感器PMSM控制策略的背景及意义及国内外发展现状,并进行了解及分析多种无位置控制策略,最终选定滑膜变控制作为本文的研究分析对象。其次介绍了完成所采用模型所需要分析并且掌握的原理,其中包括电机数学模型,永磁同步发电机的坐标变换原理。根据这些原理,构建永磁同步发电机控制系统的基本系统。再介绍滑膜传感器的数学模型,根据此数学模型,基本建立基于滑膜变模型的PMSM控制模型,分析此时模型出现的缺陷,如由于开关特性,导致时间延迟、空间滞后,造成系统抖振。所以需采取措施减少高频抖振。在模型中运用饱和函数代替开关函数,采用低通滤波器,并且为提高转子估算精度,采用锁相环结构估算转子速度位置,最终搭建改进后的基于滑膜变模型的永磁同步电动机控制系统。该系统相比传统滑膜观测器系统鲁棒性更强,响应速度更快,并且计算误差更小。最后,利用matlab中simulink对搭建模型进行仿真,并观察仿真波形,观察模型的可行性。对改进后的滑膜结构进行性能分析,验证其稳健性及控制可靠性。
关键词:永磁同步发电机;无传感器控制;滑膜观测器;锁相环
Abstract
Industrial robots play a very important role in industrial high-efficiency production. As a motion control system that controls the core technology of robots, it is directly related to most of the performance of robots. Therefore, in order to study the robot joint motion control system, it is necessary to study the motor motion control. Compared with asynchronous AC motors and DC motors, permanent magnet motors are characterized by small size, light weight and high power density. Very suitable for the conditions of robot joint operation. In the multi-position sensorless PMSM control strategy, this paper focuses on the non-position control of permanent magnet synchronous motor based on synovial deformation model. In-depth study and research on the method of indirect rotor position and speed when working on permanent magnet synchronous motor .
The main research of this thesis is as follows:Firstly, the background and significance of the position sensorless PMSM control strategy and the development status at home and abroad are described. The various non-position control strategies are understood and analyzed. Finally, the synovial variable control is selected as the research analysis of this paper. Object. Secondly, it introduces the principles that need to be analyzed and mastered to complete the adopted model, including the mathematical model of the motor and the principle of coordinate transformation of the permanent magnet synchronous generator. Based on these principles, the basic framework of a permanent magnet synchronous generator control system is constructed. Then introduce the mathematical model of the synovial sensor. Based on this mathematical model, the PMSM control model based on the synovial deformation model is basically established. The defects of the model are analyzed. For example, due to the switching characteristics, the time delay and spatial lag are caused, resulting in system chattering. . Therefore, measures should be taken to reduce high frequency chattering. For example, in the model, the saturation function is used instead of the switching function, and a low-pass filter is used. In order to improve the estimation accuracy of the rotor, the phase-locked loop structure is adopted to make the system adaptive. Finally, an adaptive control system for permanent magnet synchronous motor based on synovial deformation model is established. The system is more robust than traditional synovial observer systems, with faster response and less computational error. Finally, the simulation model is simulated by simulink in matlab, and the simulation waveform is observed to observe the
feasibility of the model. The performance of the improved synovial structure was analyzed to verify its robustness and ontrol reliability.
Key words: permanent magnet synchronous generator; sensorless control; Sliding mode observer (SMO); phase-locked loop(PLL)
目录
第1章 绪论 1
1.1课题研究目的 1
1.2传感器的发展现状 1
1.3无位置传感器控制策略的发展现状 1
1.4无位置传感器的分类 2
1.5本文研究内容 3
第2章 永磁同步电机数学模型和矢量控制原理 5
2.1永磁同步电机分类 5
2.2永磁同步电机坐标变换 5
2.3永磁同步电机的动态模型 6
2.4矢量控制原理 7
2.5本章小结 7
第3章 基于SMO的PMSM无位置传感控制系统 8
3.1滑膜观测器的设计 8
3.1传统滑膜观测器系统结构图 10
3.2转子速度位置估计 10
3.3对于传统滑膜观测器的改进 12
3.4本章小结 14
第4章 PMSM无位置传感器控制系统仿真研究 15
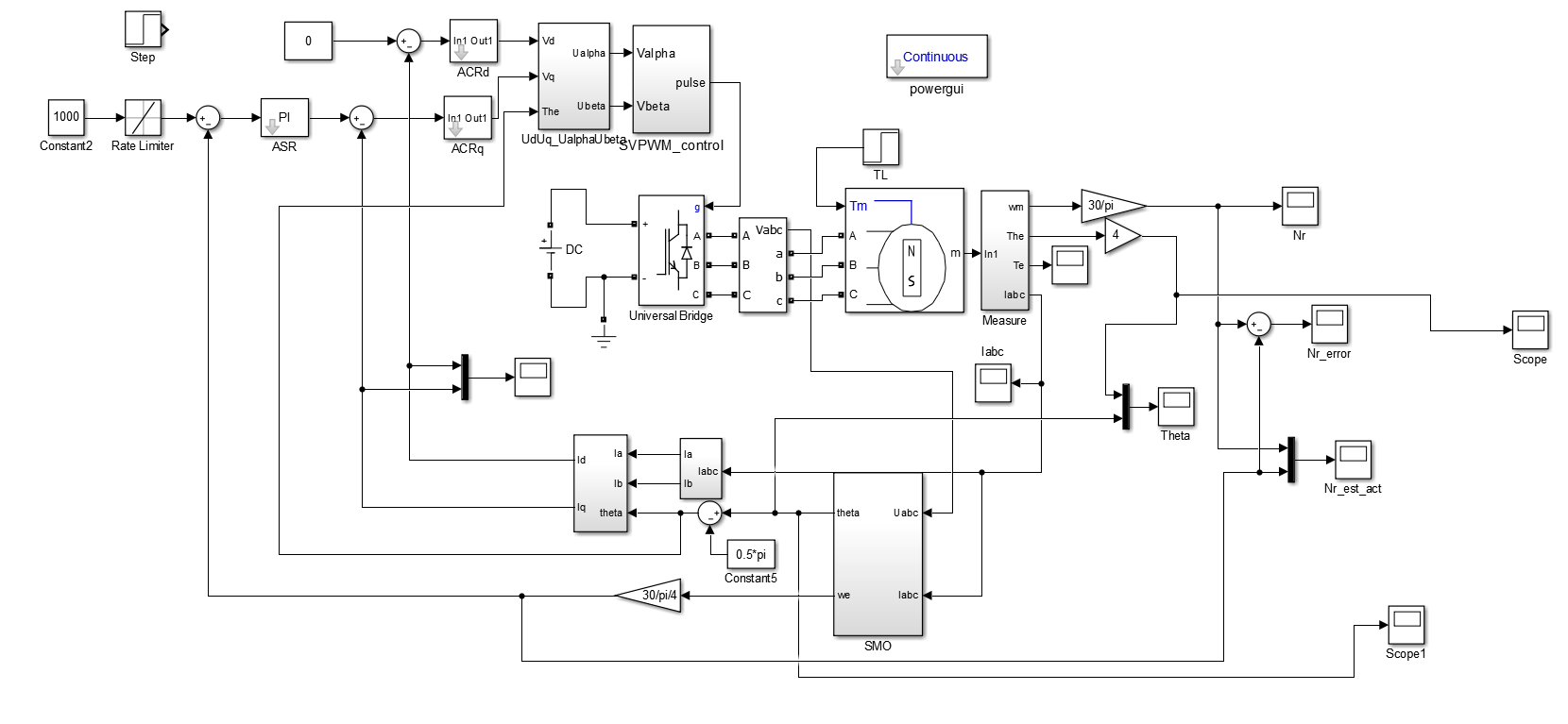
4.1系统整体仿真框图 15
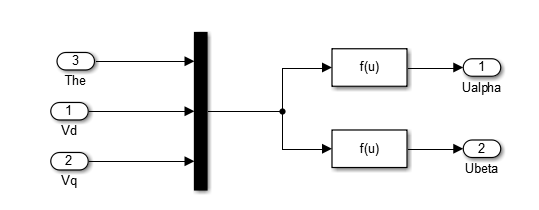
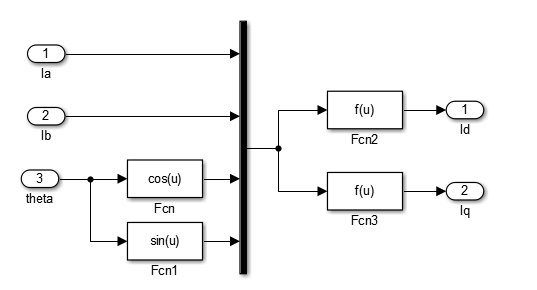
4.2坐标变换模块 15
4.3锁相环与滑膜观测器模块 16
4.4滑膜观测器仿真模块 17
4.6本章小结 22
第5章 总结与展望 23
5.1对全文工作的总结 23
5.2对本文工作的进一步展望 23
致谢 24
参考文献 25
第1章 绪论
1.1课题研究目的
近几十年,随着我国经济科技的发展,机械手臂运用越来越广泛,机械手虽然不够灵活,但它能够不断工作,不怕枯燥,能够做人类不能做的重活。机械手臂发展分为几个方向:重复高精度,指精度在一定的重复范围内达到恒定;模块化,机械手模块化增加了机械手运用范围;变得更加节能化。机械手将越来越融入我们的生活。作为机械手研究中的重要环节,永磁同步发电机研究的意义不言而喻。且永磁同步电动机已广泛应用于多种能源工业应用中,如石油泵、鼓风机和压缩机,且在工业机器人的结构中占据非常重要的地位。永磁同步电动机以永磁体产生的磁通替代励磁,相比于其它电机,可以直接励磁,无需电流,并且不消耗其它能源,且效率得到了提高[5]。永磁同步电动机机与其他电机相比主要的优点在于其高功率密度,易维护和高可靠性。但是大量的永磁同步电动机会消耗很大的电量,若高效的控制驱动系统被设计并且使用,那么全球总电力的百分之二十至百分之三十可以被节省。到目前为止,于1972年提出的矢量控制方法可能是较为有效的永磁同步电动机控制方法。但是要实现此种方法,准确估计转子的位置及速度是必须的[6]。这需要转子位置传感器及速度传感器。机械传感器通常包括变压器、编码器以及霍尔效应传感器。使用机械传感器不仅增加了永磁同步电动机的成本和数量,而且机械传感器对环境约束敏感如:振动及温度。且传感器安装要求较高,与转轴存在同心度的问题。以上限制了机械传感器在苛刻应用环境中的可靠性。为了克服这些缺点,目前已提出多种无位置传感器的设想[7]。
1.2传感器的发展现状
永磁同步电机的控制系统中,需要用传感器检测转子信息。传感器是将一种信号转为另一种信号的设备。根据不同原理,传感器有不同的分类。电位器式传感器是将机械角度位移转为电压信号或电阻信号的一种传感器。可以直接提取转子位置信息,但是电阻滑片有摩擦,可能会造成磨损,损坏设备,可靠性得不到保证。编码器是目前使用较多的位置传感器,能够输出数字信号,但对环境敏感,对工作环境要求高。旋转变压器是一个模拟式位置传感器,且对环境参数不敏感,估算精度高,所以此传感器有着长远发展。
1.3无位置传感器控制策略的发展现状
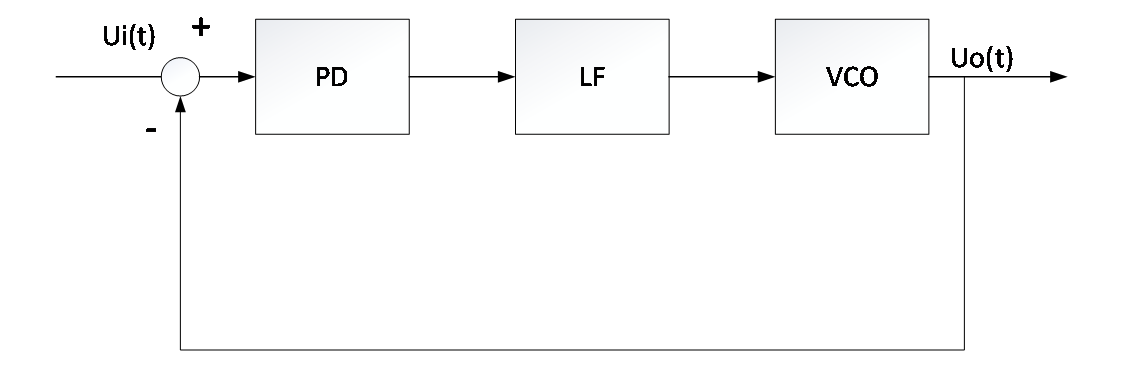
20世纪七十年代起,国外学者们展开了对无位置传感器控制的研究。早期无位置传感器多为波形检测法,后经国外多机构多学者的多方位研究,提出了对PMSM无位置传感器控制的多种设想,并加以实现。威斯康新大学的R.D.Lorenz教授及他的合作团队于1993年提出了高频信号注入的方法来实现永磁同步电动机的无位置传感器控制,取得了许多创新性成果。德国伍珀塔尔大学的Joachim Holtz教授也致力于高频注入信号的永磁同步电动机无位置传感器控制的研究。韩国的 教授自1995年就开始发表无传感器控制方面的研究,在多种电机上使用多种方式去进行尝试。意大利Alfio Consoli,,澳大利亚的M.F.Rahman教授等都对PMSM的无位置传感器进行研究。国内浙江大学的贺益康教授对无位置传感器控制方面有细致的研究。近年来,芯片制造厂商也推出了自己的控制方案。美国的International Rectifier提出的带锁相环的无位置控制方法,主要思想为通过测定定子磁链来得到转子速度位置信息,此方案用低通滤波器代替传统滑膜观测系统含有纯积分环节,解决了直流偏置。另一家美国公司Microchip提出通过估算电机电动势来获取电机转子速度位置信息,并将此项方案用在了家用电器上,但目前看来,只适用于稳态精度要求不高的场合,又一家公司Texas Instruments使用了一种集合以上两家公司方案的滑膜控制策略,具有较好的鲁棒性。
教授自1995年就开始发表无传感器控制方面的研究,在多种电机上使用多种方式去进行尝试。意大利Alfio Consoli,,澳大利亚的M.F.Rahman教授等都对PMSM的无位置传感器进行研究。国内浙江大学的贺益康教授对无位置传感器控制方面有细致的研究。近年来,芯片制造厂商也推出了自己的控制方案。美国的International Rectifier提出的带锁相环的无位置控制方法,主要思想为通过测定定子磁链来得到转子速度位置信息,此方案用低通滤波器代替传统滑膜观测系统含有纯积分环节,解决了直流偏置。另一家美国公司Microchip提出通过估算电机电动势来获取电机转子速度位置信息,并将此项方案用在了家用电器上,但目前看来,只适用于稳态精度要求不高的场合,又一家公司Texas Instruments使用了一种集合以上两家公司方案的滑膜控制策略,具有较好的鲁棒性。
从国内外研究来看,到目前为止,没有一个成熟的控制策略,能够在全部速度运行范围内对电机转速和位置进行精确估算。当电机处于低速时,无法利用反电动势来估算位置,因此多利用电机凸级效应来估算转速及转子位置。当电机运行在中高速以上区域,由于基于电机转速估算方案本身特点的限制,及其非理想特性,无法准确估算转速及转子位置。
1.4无位置传感器的分类
目前,永磁同步电动机无位置传感器控制大概分为:高频信号注入法和基于电机基波模型的方法。高频信号注入法的主要原理是将信号注入电动机系统,通过载波激发的反馈信号来估算转子速度和位置。这个方法可以在静止和低速条件下产生令人比较满意的控制性能。然而,高频信号输入法的主要缺点是信号注入包括系统外部噪声,使得这种方法在没有解决噪声之前不适用于永磁同步发电机的控制。
与高频信号注入法不同,基于电机基波模型的方法不限制电机结构或要求附加信号产生硬件。基于电机基波模型的方法从电机的动态模型中获得反电动势或磁链,然后通过计算转子反电动势或磁链估算转子的位置与速度。基于电机基波模型的方法包括通量观测器、自适应系统观测器、卡尔曼滤波观测器、龙伯格观测器及滑膜观测器等等。
模型的自适应观测方法已广泛用于永磁同步电动机的无位置控制系统中,但是此方法对电动机的参数变化敏感,因此遭受稳定性及估算误差问题。与模型自适应观测器类似,在低速或静止条件下,龙伯格观测器也被广泛使用,但是同样的,龙伯格观测器的主要缺点也在于对参数变化的敏感性。为了消除模型自适应观测器和龙伯格观测器所有的缺点,多位研究人员已提出并采用卡尔曼滤波观测器。卡尔曼滤波观测器具有随时间更新的可变增益值,从而提高了低速条件下的估算精度。但是卡尔曼滤波器方法需要构造协方差矩阵,增加了计算量,且观测器的初始值很难分配。在这些方法中,滑膜观测器法作为无位置传感器有多个优点,如鲁棒性强和有利的动态条件。另外,与其他观测器相比,滑膜观测器不需要获得转子速度与时间常数作为输入。因此,这些值不会影响位置和速度估计。
但是,根据之前的研究,传统的滑膜变系统有以下两个主要缺点:
(1)恒定观察器增益值引起的抖动现象会影响估计的准确值。
(2)反电动势估计波中存在高次谐波和外部噪声,特别是在动态状态下,从而影响电机转子速度与位置的估算的计算精度。
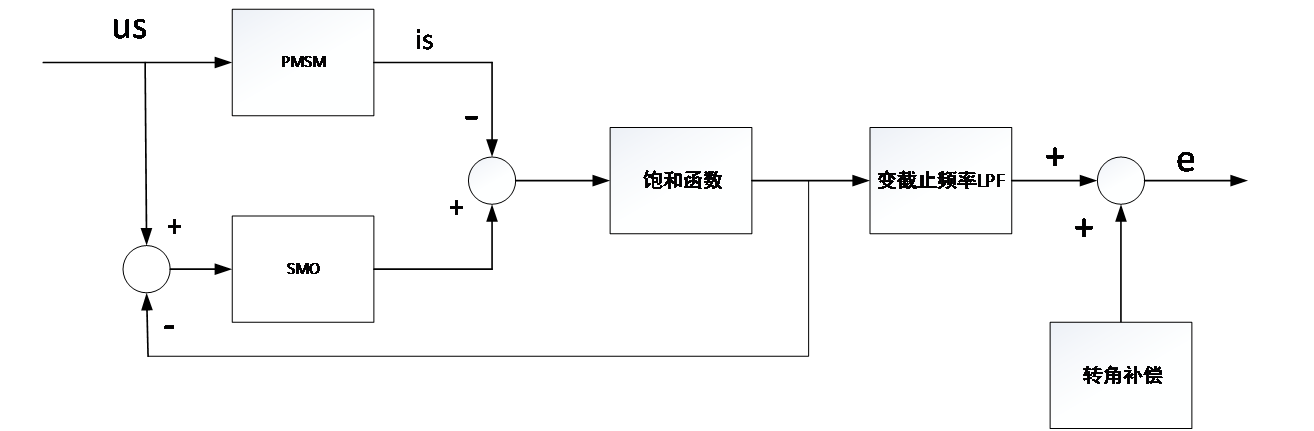
在早期的滑膜观测系统中,总是使用开关函数来实现该系统的切换功能,由于开关函数由明显的非连续特征,所以出现明显时间延迟。为了减少这种大的抖动,将这种函数改为饱和函数。虽然这种方法可以改善一部分性能,但这种滑膜观测器系统在时间延迟上的挑战仍然存在。滑膜观测器的增益值设置需要为一个适当的常数,可以满足稳定性并且将滑膜运动收敛到切换表面。当估计误差较大时,该常数使滑模表面收敛较慢。当误差小时,快速收敛到滑膜表面,导致过冲。这些滞后和过冲,导致抖动。为了解决这个问题,有学者提出迭代滑膜观测。但是,基于数字信号的控制器对于高阶复杂导数的实现是不可行的。需要采取一些智能结构来解决观测器的抖动。
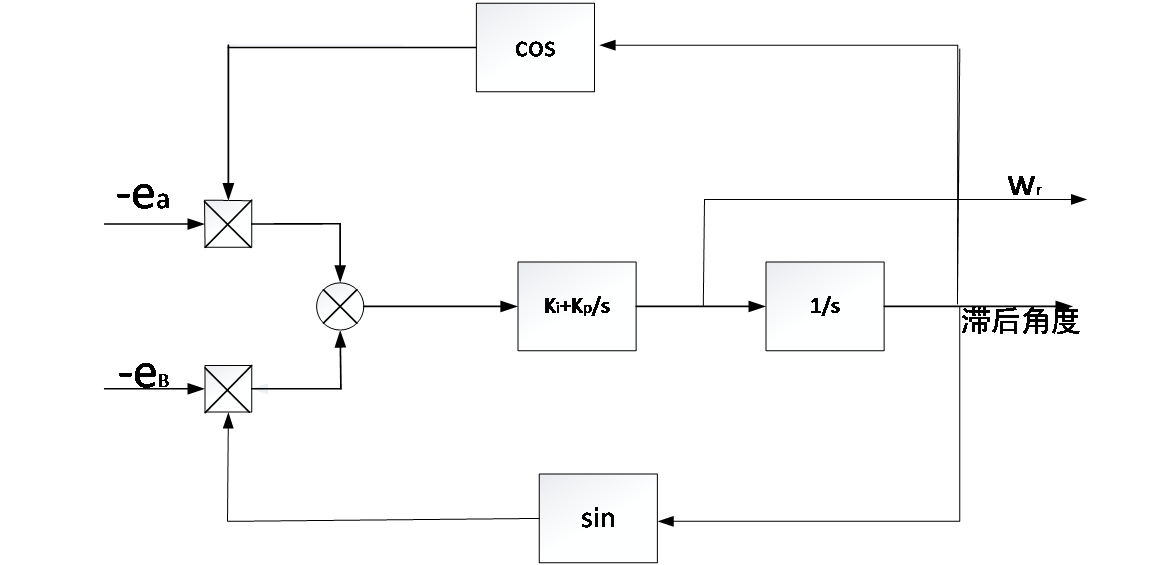
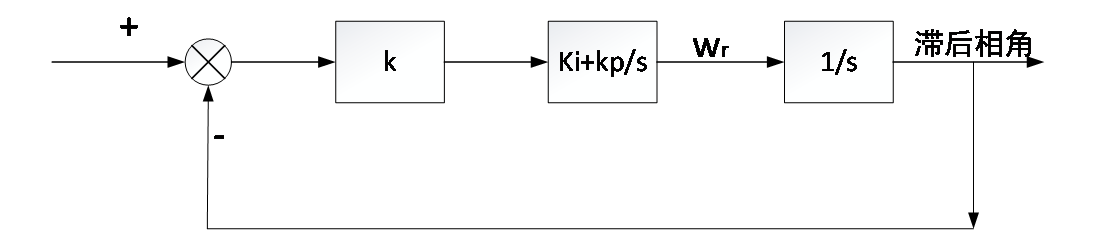
根据参考文献,高次谐波和外部噪声主要由以下三个因素造成:磁体之间的间隙、逆变器的非线性和磁通中的谐波。在传统的滑膜观测器系统中,常见的计算转子的位置与速度是弧切线计算方法。但是,用于位置计算的弧切线函数对于对称变化敏感,并且计算中的除法运算误差较大。近年来,能够提供精确的同步信号并且可以免疫噪声,锁相环技术已被广泛用于获得转子位置信息。然而,由于存在高次谐波和外部噪声,锁相环带宽较小,这降低了系统的动态特性。虽然使用了低通滤波器能够滤除传统滑膜系统的谐波,但低通滤波器的性能不太令人满意。有人提出自适应滤波器与锁相环结合,滤除信号中的五次谐波和七次谐波。
本文的目的是通过改进系统控制实现永磁同步电动机精确的转子速度和位置的估计。本文提出一种新型的基于滑膜变模型的永磁同步电动机无位置的控制方案。
1.5本文研究内容
本文以PMSM为控制对象,通过对多种无位置传感器PMSM的控制策略的分析,选定基于滑膜观测器的无位置控制,并根据传统滑膜模型的缺点,对控制方案进行改进,并运用matlab的 搭建模型,验证方案是否可行且有效。
搭建模型,验证方案是否可行且有效。
本文各章节内容如下:
- 第1章描述了本文研究的们目的与意义,并对本文研究内容进行分类,并阐释优缺点,最终选定本文采用的控制方法。
- 第2章分析永磁同步电机的结构并对永磁同步发电机的数学模型进行系统阐述,且对矢量控制原理进行深入分析。
- 第3章先分析传统滑膜变控制策略,根据它的优缺点对其进行改进,提出锁相环、滤波器与传统滑膜控制系统相结合的方案。
- 根据前文理论基础搭建永磁同步发电机无位置控制仿真,获得波形,验证仿真方案的有效性,在不同条件下的工作情况。
- 对本文研究内容进行总结,并对本文进行展望。
本章节所写为本文绪论部分,包括本文研究技术背景及意义和相关技术的发展现状,介绍了永磁同步电机无位置控制策略的分类,并选定本文所用方案基于滑膜观测器的永磁同步电机控制策略。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: