基于串极调速的交流电机调速系统设计毕业论文
2020-02-18 10:56:09
摘 要
本设计将运用单片机技术,配合串级调速装置,设计电机运行流程,并且要考虑到电机的启动、运行、调速和制动的特性,系统才得以对电机调速达到最准确的控制。
本文主要是通过研究交流异步电动机的工作过程和串级调速的原理,提出较为合理的设计方案,选择相应的设计方法和手段,然后通过对设计方案的严谨分析,对系统硬件进行相应的参数选择和计算,从而使该设计其满足工程设计参数指标。同时设计由单片机为核心控制串级调速的系统,由单片机完成电机的启动、停止,并且在运行过程中产生触发脉冲,这样就能实现对串级调速装置的操纵,最终达到对电机转速进行实时调节的目的,且实现能量的充分利用,满足实际生产的需求。
关键词:单片机 交流异步电动机 串极调速 触发脉冲
ABSTRACT
This design will use single-chip technology, with cascade speed control device, design the motor operation process, and to take into account the start, operation, speed regulation and braking characteristics of the motor, the system can achieve the most accurate control of motor speed regulation.
This thesis mainly studies the working process of AC asynchronous motor and the principle of cascade speed regulation, putting forward a more reasonable design scheme, choosing the corresponding design method and means, and then through the rigorous analysis of the design scheme, carring on the corresponding parameter selection and calculation of the system hardware, so as to make the design meet the engineering design parameters. At the same time, a cascade speed regulation system is designed, which is controlled by single chip microprocessor. The starting and stopping of the motor are completed by single chip microprocessor, and trigger pulses are generated in the operation process. This can realize the operation of cascade speed regulation device, and finally achieve the purpose of real-time regulation of the motor speed, and realize the full use of energy to meet the needs of actual production.
Key Words: Singlechip AC asynchronous motor Cascade speed regulation Trigger pulse
目录
摘要 I
ABSTRACT II
1绪论 1
1.1课题背景 1
1.2调速方式选择 2
2串级调速系统设计 4
2.1串级调速原理 4
2.2电动机供电方案的确定 5
2.3电动机容量校核 5
2.3.1最大转差率 6
2.3.2转子整流器的最大输出电压 6
2.3.3最大直流整流电流 7
2.3.4电阻值的确定 7
2.3.5电动机的额定转矩 8
2.4硬件元件的选择 8
2.4.1整流变压器的参数计算 8
2.4.2硅整流元件及晶闸管的选择 9
2.4.3平波电抗器的设计 10
2.4.4逆变变压器的参数计算 11
2.4.5调速系统的保护 13
2.4.6反馈回路设计 18
2.5控制回路的设计 19
2.5.1 电流截止负反馈设计 19
2.5.2 转速环设计 20
3基于单片机的电路设计 25
3.1 AT89C51单片机简介 25
3.2系统的硬件部分 26
3.2.1数据采样部分 27
3.2.2脉冲放大驱动部分 27
3.2.3 同步电路 28
3.2.4 时钟电路 29
3.2.5 复位电路 29
3.3系统的软件部分 30
3.3.1 触发脉冲的产生流程图 30
3.3.2 程序设计 31
4串级调速系统仿真 38
4.1串级调速系统主电路仿真 38
4.2单片机控制的串级调速系统仿真 39
4.3结果分析 41
5 总结与展望 43
5.1 总结 43
5.2 展望 43
参考文献 44
附录A 46
附录B 47
附录C 48
附录D 49
致谢 53
1绪论
1.1课题背景
在八十年代,电气方面的变化是极为显著的,交流电机的调速技术发展的越来越快,当时世界上的各个调速领域都开始尝试应用该项技术。调速系统由小容量到大容量,由一般的调速要求到较高标准的调速要求,该项技术都在得以不断地应用,几乎可以说是多方位覆盖,越来越受到人们的欢迎。随着时间的推移,这项技术在各国国家都形成了一个新的产业体系,造福着这些国家的人民。把过去一向为直流电机调速系统所占领的市场逐步排挤出去。据日本的统计,1975年销售的交流与直流电机调速系统之比为1:3,到1985年却变成为3:1,可见其增降速度之快。
十九世纪80年代以前,直流调速占据着市场,直到十九世纪九十年代中期交流电的出现,交流调速技术就开始蓬勃发展了。上世纪30年代开始之后交流调速的方法开始增多,应用也开始变得广泛起来,但是相比直流调速系统,它还是有很多的不足之处,无法与其相抗衡。到了20世纪60年代之后,电力电子技术、电机技术等技术的快速发展催生交流调速系统,一直以来直流调速系统牢固占据市场的格局也因此被改变了。
交流电机调速的技术发展的如此之快,与直流电机调速存在一定的问题是有直接关联的。首先就是直流电机的换向问题,机械式的换向器这一重大缺陷使得直流电机调速方式被严重地限制着。为了使得换向器安全稳定的工作,它的直径就会被做的较大,这在有尺寸要求的场合是不被允许的。另外经常性的停机检修也增加了人们的工作量,它的安全性问题一直困扰着人们。除此之外,交流电机调速技术的发展也与其他的外部因素有一定的关联,例如能源危机等,这就促使人们不断创新,找到节能减排的新方法,从而减少对能源的依赖。于是占工业生产用电约一半的各种风机、泵、压缩机等类的电气传动系统理所当然地成为人们主要的关心对象。如果采用改变电机转速的办法来实现流量的调节,则由于轴功率是与流量的三次方成正比的,因此可收到十分明显的节电效果。这就是为什么七十年代以来,掀起了一股强烈的交流电机调速技术热风的原因之一。三条轨迹:一条是以取代直流电机调速系统为目标的高性能交流电机调速技术,另一条是以节能为目的的。在风机、泵、压缩机类机械中实现简便易行、性能要求不高的调速技术。第三条是沿着直流电机调速系统一向无法插足的特殊领域,如特大容量、特高转速的应用场合发展。
我国交流电机调速技术发展的现状是:在基本理论及新型控制方法的研究上有了一定的基础,但多是以各高等院校为主,在产业的形成上则差距较远,进展缓慢。目前自行研制能供应的商品大致为:数百千瓦级的无换向器电机及电流型逆变器,百千瓦级的电压型逆变器,2500千瓦级的串调装置等,均未采用矢量控制,也未用微机经制,主要是用晶闸管组成。一些使用部门也引进了一些单台装置,如用GTO的电力机车,交一交变频器供电的可逆轧机,大型风机的变压变频调速,轨道多电机变频调速装置等,但消化吸收及形成自我配套能力则差距甚远。GTO、GTR等关键的电力电子器件正处在引进阶段,尚未形成生产能力。因此总的来看,我们的综合水平大体上落后于国外的综合水平。
与世界发展的势头相比,我们的发展速度无疑地是缓慢的。特别是在产业的形成上,更是落后。我们必须采取正确的对策,加速发展,才能跻身于于这个新兴产业的行列之中,为我国的四个现代化作出应有的贡献。我国在改革开放之后也加快了科技发展的步伐,因此交流调速技术也得以快速地发展,我们正在缩小与国外的差距,并把超越他们作为我们的动力和目标。
本次设计的背景是工厂废水的处理问题。工厂作业等活动产生的废水,是人们生活中极为严重的污染源,及时处理工业废水显得尤为重要。依据目前的废水处理技术大发展情况,目前有两种有效的处理方法:一种方法是可以通过选择吸附掉其中的杂质,然后再通过调节PH等方法使废水达到中性程度,接着再使其重新回到工业流程中,如作冷却用等。另一种方法则是可以通过生化池来处理废水,使废水去除杂质,然后得到进一步的净化,进而达到可以被排放的标准。在生化池中,曝气机是必不可少的。曝气机在工业生产中根据需要可以进行恰当的升速和降速,通过合理的调速就可以将大多数的悬浮物去除掉,极大程度地净化废水。因此在工业生产中经常采用第二种方法。在第二种方法中,要想充分发挥曝气机的作用,就要通过软、硬件的合理设计来实现其良好的调速功能。
1.2调速方式选择
(1)调压调速:适用于要求小容量电机,调速范围较小、调速精度较低的场合[1];技术发展较为完善,设备易操作,花费少,维修较为方便。缺点就是它的调速性能不好,效率不高,能量浪费情况较严重。(2)变频调速:可以较为平滑地进行调速,启动电流较小、启动转矩较大,调速精度较高,效率较高,属能量消耗小的调速方式。[2]但是其成本较高,且容易产生谐波污染电网,发出的PWM波会使得电机、电缆的热损耗加大[3]。(3)串级调速:技术上较为成熟,能较好地利用能源、减少损失,系统设计较为容易,系统工作效率较高,成本较低。但是晶闸管串级调速有两个不足之处:第一,缺乏瞬时断电保护;第二,功率因数不高,一般只有0.4-0.6[4]。(4)转子串电阻调速:功率因数较高,操纵起来较为容易。但是该法属有级调速, 速度调节的平滑性欠佳,且工作效率不高;同时能量浪费情况较严重[5],因为这时有相当一部分功率消耗在调节电阻上。
在实际工程中,我们要根据具体要求来进行选择合适的调速方式。调压调速很明显的缺陷就是功耗过大,能量的浪费情况有些严重。变频调速是比较先进的技术,但是在做工程项目的时候,成本是需要重点参考的因素,变频调速的成本相抵来说较高。而转子串电阻调速是有级调速,平滑性不好。串级调速成本低,且该项技术已经十分成熟,适用于运用在工程实践上。对于晶闸管的问题,也可以设计相应电路进行保护。
针对曝风机的调速,选择调速方式的依据便是适合风机使用,效率较高,调速性能较好,最重要的是成本较低,再结合技术上的易实现性,串级调速方式是较好的选择。
2串级调速系统设计
2.1串级调速原理
串级调速法可以将转子绕组的一部分能量通过电能变换过程再送回到电网中去,如此做法相当于是改变了转子的电阻,从而改变了电动机的转差率。由于转子的电压和电网的电压大小通常来说是不同的[6],因此能量向电网逆变的过程需要变压。
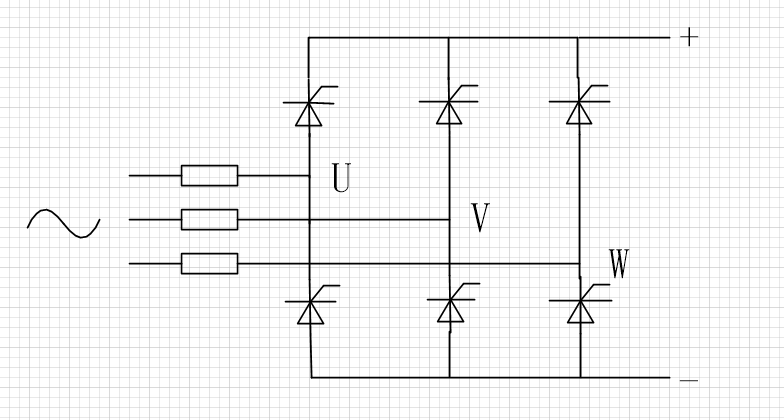
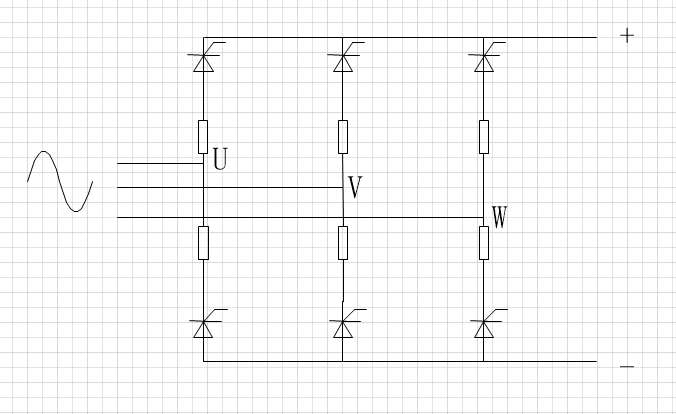
在转子回路中添加一个电动势进行调速的重点就是在电机转子侧接入一个频率和幅值可调节的电压。比较简单的做法是,将转子电压先进行整流使其成为直流电压,接着再加入一个直流电动势,通过调节该直流电动势的大小,电动机的转速就能相应的变化[7]。当然对这一直流电动势要有一定的要求。首先,它需要是可以连续改变的,以满足对电动机无级调速的要求;其次,从能量损耗的角度看,要求发出直流电动势的设备能够获取从转子侧传递来的大部分功率并加以利用。例如可以把它转换为机械功率。综上较好的方案是采用工作在有源逆变状态的晶闸管可控整流装置作为产生直流电动势的电源[8]。如图2.1所示。
![F:\1579088498\Image\C2C\8Y8233@BPZC`0LR{@%]]%)M.png](http://www.biyelunwen.org/wp-content/uploads/2020/02/lw3968_20202181056551.png)
图2.1 电气串级调速系统原理图
根据本设计系统总图来设计启停操作。由图2.1也就是系统总图可以得到系统的启停顺序应为:首先同时闭合KM1和KM2,这属于启动系统操作。过了几秒种后,KM1保持不变,KM2断开,同时依次闭合KM3、KM4,这属于切换开关操作。这时系统开始发出双脉冲来依次触发相应晶闸管。系统运行完成后,依次断开KM4、KM3和KM1,系统停止。
在基于单片机的电控系统基础上配合串级调速装置,运用单片机控制技术,可以解决实际调速问题。
2.2电动机供电方案的确定
此次的工业背景对于转速的范围要求较小,对静态性能有一定性能要求。
对于静止的可控整流器,通过整流器进行电能变换以获得可以按照实际要求进行调节的直流电压。通过操控触发装置GT的电压进而来改变触发脉冲的相位,从而可以实现连续的调速。而且该系统可以有效提高系统的动态性能[8]。根据此设计的技术要求和特点来看,可以选晶闸管可控整流器系统。
由于系统设计的复杂性、设计的经济性,以及要符合各项具体要求,且考虑到三相桥式全控整流电压的所需的平波电抗器的电感量也可相应减少,减少了成本。并且晶闸管可控整流装置产生的噪音少、装置反应速度快,而且工作产生误差的情况较少,工作效率较高[9]。综上选晶闸管三相全控桥整流电路供电方案。
2.3电动机容量校核
选取三相异步电动机型号为“Y315M2-4”,该异步电动机技术数据列表如表2.1。
表2.1 “Y315M2-4”异步电动机技术数据列表
型号 | 功率 KW | 转速 m/s |
Y315M2-4 | 90 | 1490 |
转子开路相电势 V | 转子线电流额定值 A | 定子线电流额定值 A |
340 | 81 | 85.9 |
下面进行该电动机容量的校核。
2.3.1最大转差率
我们称 为转差率。其中
为转差率。其中 ,其中
,其中 为电机极对数,
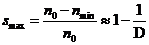
为电机极对数, 为供电频率[10]。当取得最大电磁转矩时,最大转差率如式2.1所示。
为供电频率[10]。当取得最大电磁转矩时,最大转差率如式2.1所示。
 (2.1)
(2.1)
式中:  : 电动机的同步转速,近似等于电动机的额定转速;
: 电动机的同步转速,近似等于电动机的额定转速;
 : 串极调速系统的最低工作转速;
: 串极调速系统的最低工作转速;
 : 调速范围(
: 调速范围( )
)
转差率 
最大转差率 
调速范围 
最大转差率即临界转差率,决定着异步电动机能否维持可靠工作的状态。因此了解异步电动机的最大转差率至关重要,这关乎异步电动机的稳定运行。
2.3.2转子整流器的最大输出电压
表2.2 变流器主电量计算系数
型号 | KIT | KUT | KUV | KIV | KIL | KST | KL | K |
三相带中线 | 0.367 | 0.67 | 0.577 | 0.472 | 1.35 | 1 | 0.866 | |
三相桥 | 0.367 | 1.35 | 0.815 | 0.816 | 1.05 | 2 | 0.5 | |
双三相桥串联 | 0.367 | 2.70 | 0.816 | 1.578 | 1.03 | 4 | 0.36~0.52 | |
双三相桥并联 | 0.184 | 1.35 | 0.418 | 0.789 | 1.03 | 1 | 0.26~0.32 |
 (2.2)
(2.2)
式中:  :转子开路相电势(该电动机参数取340V);
:转子开路相电势(该电动机参数取340V);
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: