远程操控水下机器人推进控制研究毕业论文
2020-02-18 11:00:50
摘 要
我国作为全球面积第三大的国家,海洋也是我们国家不可或缺的一部分,对海洋的研究以及对海洋的开发已经成为我国现阶段一个不可缺少的发展因素。研究海洋、探索海洋必须应用到深海技术,而水下机器人便成为其中最重要的手段之一。在我国科学家的研究以及外国先例下,水下机器人已经得到了一定程度的发展,并且这项技术越来越得到国内外的重视。其综合性复杂,技术密集度高,研制水平难,充分提现了一个国家的综合力量。
在深海,水下机器人的优势得到了更大的发挥,人类无法承受深水的压力而不得不采用水下机器人进行作业。本文设计了一种简单的、低成本的有缆水下机器人。并对水下机器人进行航速分析。
首先,本文介绍了水下机器人的国内外发展现状以及发展趋势,对该科技所必须研究的意义。并对PI控制器的发展历史以及现阶段的发展成果进行简单的剖析。
其次,本文结合了PI控制器以及水下有缆机器人的航速控制的复杂问题,对基本的水下有缆机器人的航速控制有简单的分析。运用matlab建立远程操控水下机器人动力学和运动数学模型。
然后,本文分析了远程操作水下机器人的速度与推进电机转速之间的函数关系,设计了一种远程操作水下机器人航速控制的算法,使远程操作水下机器人能满足在不同航速时的控制要求。
最后,利用matlab模拟水中运行时的各种复杂工况,测试该有缆水下机器人的航速推进控制系统的可行性和优越性。
关键词:水下机器人、PI控制器、航速控制
Abstract
As the third largest country in the world, China's ocean is also an indispensable part of our country. The research and development of the ocean has become an indispensable development factor for China at this stage. To study and explore the ocean, we must apply deep.sea technology, and underwater robot becomes one of the most important means. Under the research of Chinese scientists and the precedent of foreign countries, underwater robots have been developed to a certain extent, and this technology is getting more and more attention at home and abroad. Its comprehensive and complex, high technology intensity, the level of development is difficult, fully withdraw a country's comprehensive strength.
In the deep sea, the advantages of underwater robots have been given greater play, human can not withstand the pressure of deep water and have to use underwater robots for operations. This paper designs a simple and low.cost underwater robot with cable. The speed of underwater robot is analyzed.
Firstly, this paper introduces the development status and trend of underwater robots at home and abroad, and the significance of the research on this technology. And the development history of PI controller and the development results at this stage are simply analyzed.
Secondly, this paper combines the complex problem of PI controller and the speed control of underwater robot with cable, and makes a simple analysis of the basic speed control of underwater robot with cable. Matlab was used to establish the dynamics and motion mathematical model of the remotely operated underwater robot.
Then, this paper analyzes the functional relationship between the speed of the remotely operated auv and the speed of the propulsion motor, and designs an algorithm for the speed control of the remotely operated auv, so that the remotely operated auv can meet the control requirements at different speeds.
Finally, the feasibility and superiority of the speed propulsion control system of the underwater robot with cable are tested by simulating various complex working conditions in water with matlab.
Keywords: underwater robot, PI controller, speed control
目录
摘要 I
Abstract II
第一章 绪论 1
1.1课题研究的背景及意义 1
1.2国内外现状 1
1.3本文主要研究的内容 2
第二章 远程水下机器人控制系统的分析 3
2.1远程水下机器人的分类 3
2.2国内外ROV控制系统设计方案 4
2.2.1 PID控制 4
2.2.2滑动控制 5
2.2.3自适应控制 5
2.2.4模糊控制 5
2.2.5神经网络控制 5
2.3本章小结 5
第三章 建立ROV动力学和动力学模型 6
3.1 动力学模型 6
3.1.1参考坐标系 6
3.1.2动力学模型分析 7
3.2受力分析 10
3.2.1浮力与重力 10
3.2.2推力 10
3.2.3阻力 11
3.3本章小结 11
第四章 ROV航速控制算法 12
4.1 ROV的结构 12
4.1.1 ROV的设计结构 12
4.1.2 ROV的推进器方案 13
4.2模型简化 14
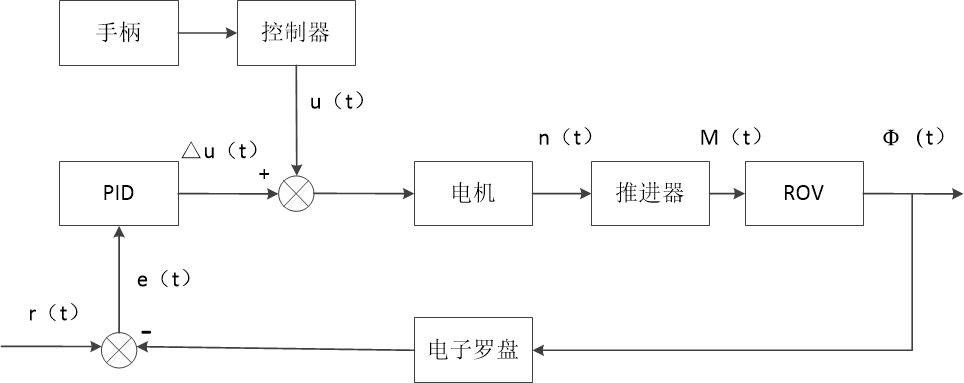
4.3 ROV航速控制算法 15
4.3.1 ROV水平方向运动的传递函数 15
4.3.2电机与推进器的传递函数 17
4.3.3系统传递函数 17
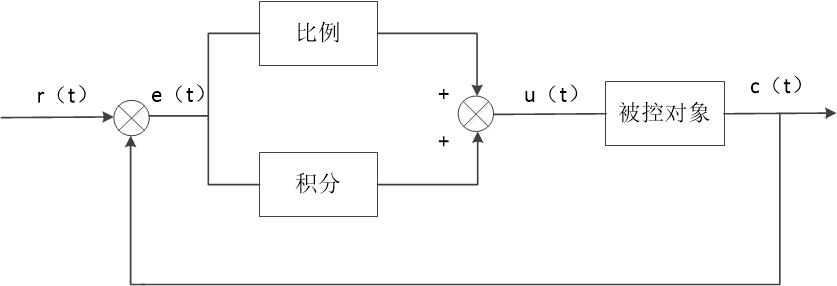
4.4控制器的控制规律 18
4.5本章小结 20
第五章 Simulink的测试 21
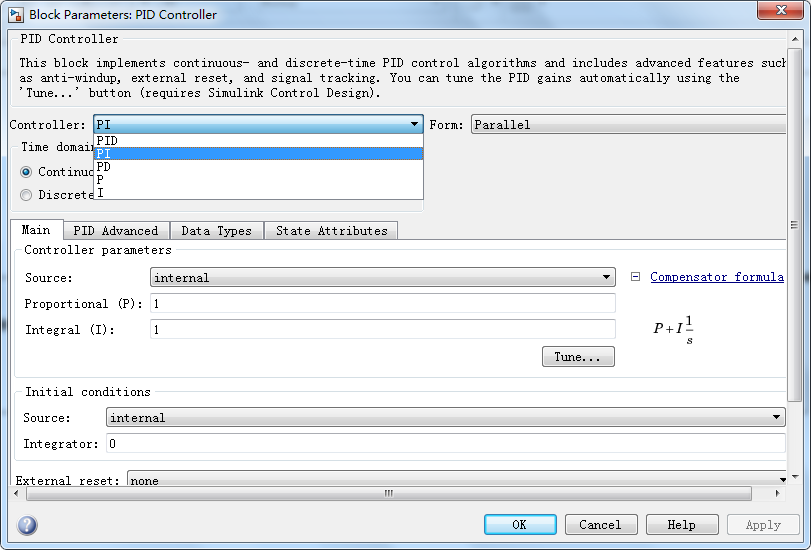
5.1对PI控制器的参数整定 21
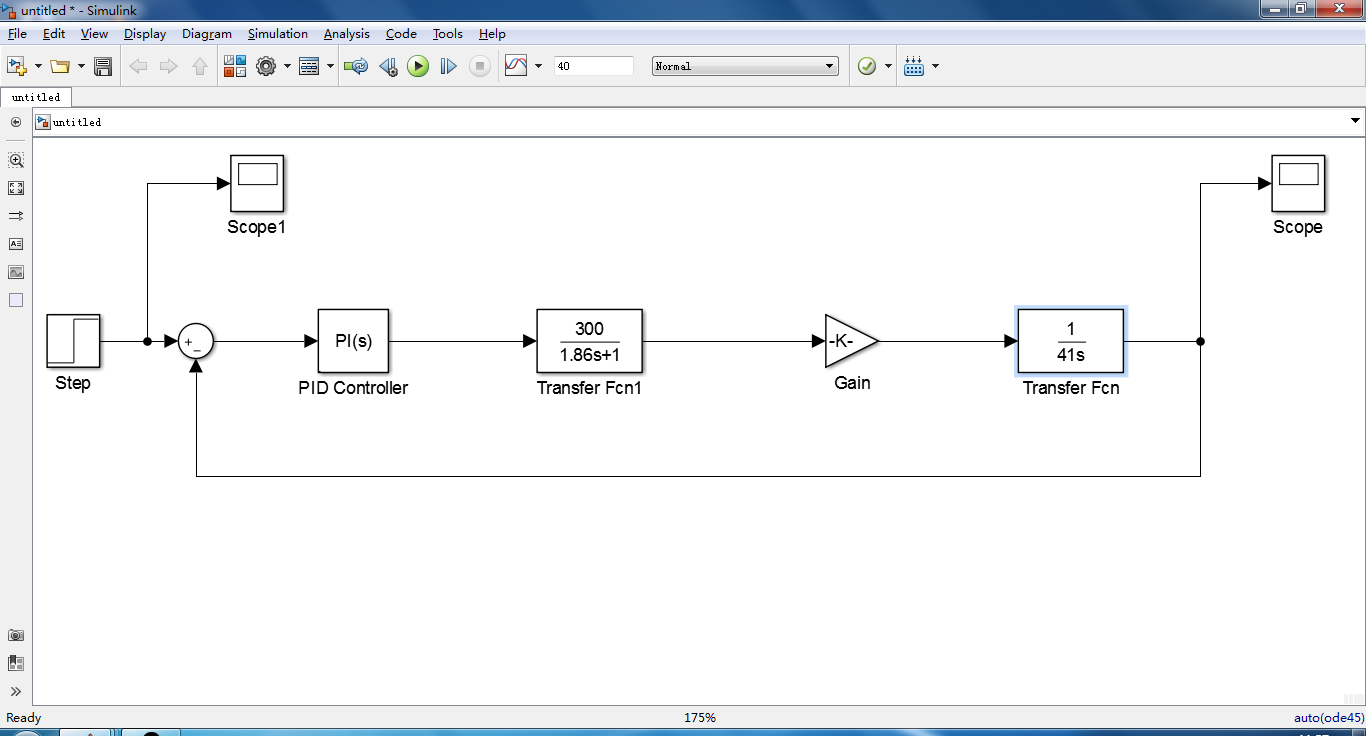
5.2对PI控制器的仿真 21
5.3航速控制的仿真结果 23
5.4仿真控制的改进 24
5.5本章小结 29
第六章 总结与展望 30
参考文献 31
致谢 33
第一章 绪论
1.1课题研究的背景及意义
对于想要更好的认识我们这个富源辽阔的中国,认识海洋、开发海洋已经成为我国发展的一个不可或缺的部分。水下机器人由于作为一款能够开发海洋的高科技手段,已经在我国甚至全世界得到越来越高的重视,在我国更是取得了一定程度的发展。其综合性复杂,技术密集度高,研制水平难,充分提现了一个国家的综合力量。
随着由海洋工程的浅海研究转入深海研究,人类不得不使用新的工具来向深海进发,而远程操作水下机器人就成了必不可少的手段之一。在高深度的深海区,人类未曾探索过的未知海域,有着各种危险,但是远程操作水下机器人的优势将会发挥出最大化。
供配电系统以及深水动力传输是有缆远程操作水下机器人的重要组成部分,在深海中未知的地域为机器人提供正常工作的保障。而动力传输以及供配电系统的研究,便成为有缆远程操作水下机器人的研究关键,是其关键性技术之一。他们的优越性直接提现在了远程操作水下机器人的工作性能上。
远程操作水下机器人在各方面已经得到了广泛的运用,例如商业,科技甚至与军事上,他能帮助人们进行水下勘探、搜索以及使用机械臂完成任务的功能。
1.2国内外现状
远程水下操作机器人有很多种类,其中遥控潜水器是世界上第一台研制并投入实际使用的无人潜水器。世界上第一台遥控潜水器是在60年代和60年代在美国开发的。因为ROV的出色性能和突破功能得到全世界的广泛重视,越来越多的人力以及资金的投入,加之世界科技水平的不断突破,研究与开发进程继续加快,并开始以工业化的形式全面实施。ROV的日渐成熟,使得R OV已成为世界工业体系的重要组成部分。国内外已有500多家厂商提供了ROV相关零部件制造等服务。目前,世界上最发达国家仍然掌握着遥控潜水器研发的高端技术。在美国开发的Max Rover是一款全电动遥控潜水器,速度为3节,垂直和水平推力分别为34公斤和39公斤。它在一般水流中具有高效的性能优势。而日本研究所所研发的ROV是目前能够进入海洋深度最大的ROV,这个机器人自身携带声呐和摄像机,能够对海底的图像进行摄影,并完成取样的工作。
尽管ROV现如今能适应大多数的工作环境,能完成大多数的工作活动,但是世界上的相关研究所对ROV的研究与开发并没有中断。R OV在海洋资源勘探、油气矿产数据获取等数据采集和研究中得到了广泛的应用。它不仅是世界上使用最广泛的潜水器,也是最经济的潜水器。ROV在我国的研究和开发始于20世纪70年代,被发达国家领先了几十年甚至上百年,因此性能上还是存在着一定的差距。我国自主研发的“海人1号”能够在不同的水下环境工作,能适应不同环境进行连续性的作业,同时能够完成对各种水下生物进行采样和切割等,对我国水下研究勘探做出重要贡献。在这一点上,我国针对“海人1号”的不足进行了改进,“海人1号”的研究开发日益加强。,先后研发了不同类型作用的ROV,有勘探的,采集的,专注切割的,摄像收图的。随着8A4ROV的成功试验,我国ROV的研究领域终于进入了一个新的发展阶段。
然而,国内ROV自身的探测能力,生产技术水平以及导航和定位技术与发达国家之间存在很大差距,这限制了国内ROV的类型。即使有上述的各种原因,中国仍然很少从国外引进ROV。这不仅是国外生产成本高,而且还需要相关的配套服务来保证生产的有效运行。最重要的是,国外的渔船不能在中国广泛的海域有效使用。在我国复杂的海域,抗干扰能力和灵活性有限。
1.3本文主要研究的内容
基于国内所设计制作的大部分大中型的水下机器人,本文设计了一种简单的、低成本的有缆水下机器人(ROV)。具体内容分为以下部分
(1)收集国内外远程操控水下机器人控制系统设计方法,分析和总结各种算法的优缺点;
(2)建立远程操控水下机器人(ROV)动力学和运动学数学模型;
(3)分析ROV的速度与推进电机转速之间的函数关系,根据电机传动和自动控制原理,设计一种ROV航速控制算法,使ROV能够满足不同航速时的螺旋桨控制要求,既能够满足航速控制精度,又满足电机节能的需要;
(4)利用MATLAB模拟水中运行时的各种复杂工况,测试所设计的航速推进控制系统的可行性和优越性。
第二章 远程水下机器人控制系统的分析
2.1远程水下机器人的分类
国内外水下遥控机器人大致可分为三种类型:载人潜水器(HOV),无缆自主水下航行器(AUV)和电缆控制遥控水下机器人(ROV)。由于ROV电缆工作的特殊性,因此能用在HOV和AUV上的控制系统以及推进系统一般都适用于ROV,综上本文主要研究的是ROV,即有缆水下机器人。
从推进系统分类,可以分为电力推进系统、液压推进系统。其中ROV的推进系统包含了两种不同的类型,在现今世界上我们所能接触到的ROV几乎是由这两种推进系统所组成。电力推进系统一般是有电机直接驱螺旋桨之类的推进机构,结构简单,效率高,大多应用于中小功率的水下机器人中。本文主要研究的就是电力推进系统。
另外一种推进系统是液压推进系统,这是由液压泵作为源动力输出,动力输出通过驱动液压马达式推进器,使其作业。这种类型的推进系统功率密度大,调速性能好,并且容易在深海中进行作业,相对于电力推进系统能够易于实现水深补偿,因此在大功率的机器人中得到广泛的应用,其中主要在HOV和部分ROV中发展实现。
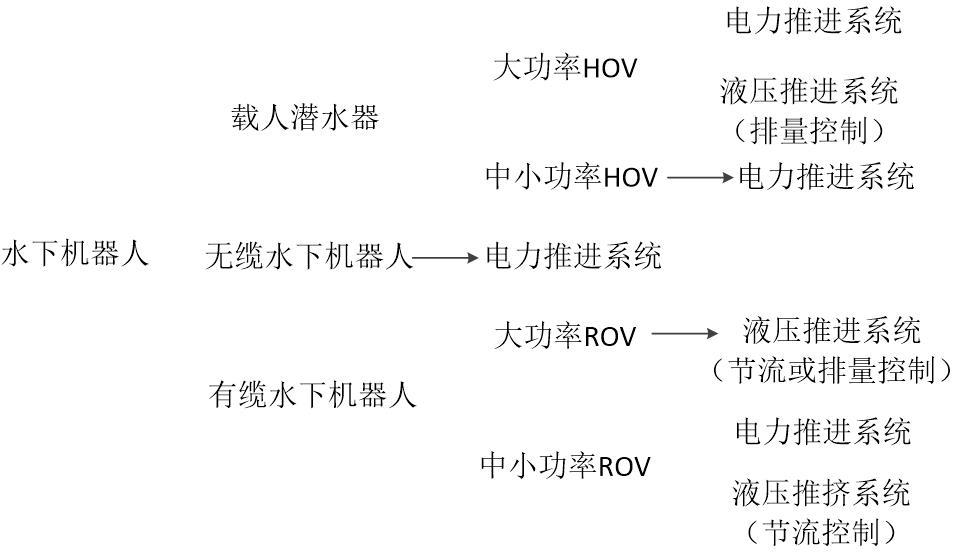
图2.1 水下机器人的分类及应用
液压推进通过调节改变液压阀闸的开度来实现推进器的转速调节,其特点为控制方式简单,但是效率较为低下,节流相对严重,因此这种控制方式也被称作节流控制。液压推进还有另一种控制方式,称为排量控制,也称为容积调速。顾名思义,通过改变液压马达的排量来实现转速调节,因此称为排量控制,其特点为无节流损失,且效率值高。在国内外的马达中,液压马达的最小排量也都达到了,正因如此,马达限制了其中在小型ROV的应用,液压推进系统只能存在于部分中大型ROV之中。如图2.1是ROV推进系统的简单分类以及应用。
2.2国内外ROV控制系统设计方案
控制系统是研发ROV的关键,而控制系统就是关键性技术之一。在海洋里对ROV进行精准的控制是衡量一款水下机器人性能的基础。但是由于ROV在水下工作时受到水流,海洋生物等不同情况的干扰,机器人在水下受到的阻力主要是来自非线性的水动力,因此ROV在海洋中的动态特性一般是不确定性的,同时也表现出很强的非线性。
由于海洋,水下工作环境的特殊性,使得ROV不能简单地类似于陆地上的被控对象,甚至于玩具赛车都与ROV有着很明显的区别。这主要表现在:运动速率缓慢,一般在几节之内;质量较大,水中摩擦力较小,无法使ROV产生急停或者急前的状态;海洋中的干扰是随机的,也是不可预知的,无法用肉眼直接观察调整。
目前国内外ROV的控制系统方案有包括有PID控制、滑动控制、自适应控制和模糊控制以及神经网络控制。
2.2.1 PID控制
最早的控制策略就是本文所阐述的PID控制。主要由于算法简单,可靠性高,因此被广泛的应用。由于PID控制系统能建立精准的数学模型的控制系统,因此工业过控中有着出色的地位。PID控制系统的各相参数明确,调整方案成熟。
实际情况下ROV的数学模型往往并不是一个数学模型就能精确表示的,研究者在研究过程中发现可以在不同的工作点附近对模型进行线性化地处理,以得到在特定范围内的线性化模型。至此PID控制技术开始较为完善的能够运用在ROV的控制中。
2.2.2滑动控制
滑动控制是一类比较简单的控制方式,由于是非线性的,因此可以在不精确的数学模型中使用,如此性能刚好完美贴合了水下机器人的运行环境。
2.2.3自适应控制
自适应控制是一种基于数学模型建模的控制策略。最早是被提出用于航天领域的控制系统中,解决航天问题,近年来才被用于水下机器人,但由于先验知识较少,模型与扰动的示例不够充裕,因此没办法广泛的覆盖。
2.2.4模糊控制
模糊控制属于经验控制的方案。通过总结经验教训,因此这是一种不需要建模的控制方案。虽然不需要建模,但需要生成和调整函数和运行规则,这些都是非常繁琐的。根据经验和模糊控制规则,通过计算得到模糊表,并将反模糊输出用于ROV的控制。
2.2.5神经网络控制
神经网络控制是20世纪80年代后期开发的自动控制领域的尖端技术之一。它是智能控制的一个新新发展方向,被广泛的应用于解决复杂的非线性、不确定、模糊系统的控制问题。在本文的下一章受力分析中可以得知,ROV在水中工作时,水下环境通常是复杂的非线性干扰,因此这一控制方案已经在ROV甚至所有的水下机器人中得到了应用。[19]
2.3本章小结
本章对水下机器人的种类,性能,操作类型,推进系统进行了分类,大致将水下机器人分为了3大类。同时也对国内外ROV控制方案进行了收集归纳和总结,对其中控制方案中使用频率最高的5种控制进行了阐述。
第三章 建立ROV动力学和动力学模型
3.1 动力学模型
ROV在水下会受到各种力和力矩的作用,为了能清晰的研究出ROV在水下受力后的运动规律,建立关于ROV的动力学和动力学模型便成为了一种很好的解决办法,也是研究ROV控制方法的基础。
3.1.1参考坐标系
坐标系主要分为两个方面,一个是坐标系的选取,而另外一个就是坐标系的转换。
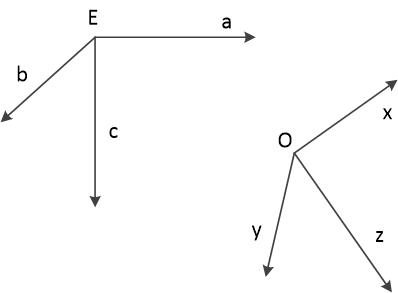
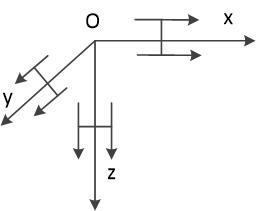
首先是坐标系的选取问题。为了能够研究ROV的运动问题,需要确定一个惯性参考系,也就是常说的直角坐标系。本文采用运动坐标系(O.x y z)。运动坐标系是和ROV的6个运动方向相同的。原点O可以任取ROV上的一点,x轴与ROV的船头对准的方向一致,y轴与ROV的侧移的方向一致,z轴与ROV的上下运动方向一致,将船首方向定为x轴的正方向后,使用右手定则决定另外的y轴与z轴的正方向。
建立的运动坐标系如图3.1所示。
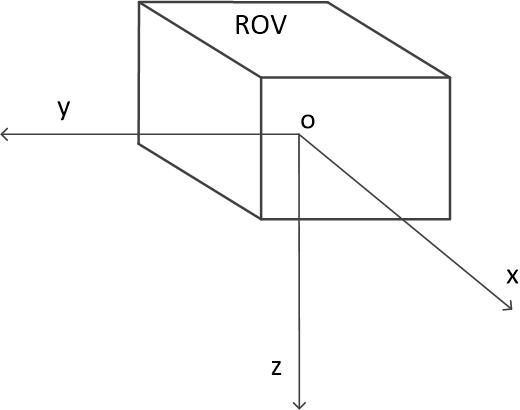
图3.1建立ROV运动坐标系模型
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: