焊接机器人关节空间定位方法研究毕业论文
2020-02-18 11:00:52
摘 要
机器人在当今社会受到很高的关注,在我们的工业生产和日常生活中会起到越来越大的作用,因此对于机器人的研究显得至关重要。机器人正常工作的前提条件是各关节之间的协调工作,是各关节的空间定位,这样才能保证到达目标位置进行下一步工作,对机器人关节空间定位的研究是机器人工作的首要条件。考虑到机器人在实际工业生产中的运用,焊接机器人占据了很大的比例,对焊接机器人的研究在机器人的研究中具有代表意义,因此,这里以焊接机器人为例,基于对焊机机器人关节空间定位的方法研究,结合实际需求,以六自由度机器人为主要研究对象,我们首先要对机器人进行三维建模和运动学分析。以MATLAB为主要学习工具,通过MATLAB Robotics Toolbox(机器人工具箱)来进行三维建模、实现对焊接机器人关节空间定位的仿真分析;机器人运动学分析主要是正运动学分析和逆运动学分析,通过对焊接机器人进行运动学分析能够很好的知道机器人的运动情况,推算出各个关节之间的数学函数联系,它们之间的空间位置变换的关系,通过对运动学分析得出的函数关系,易于编写出一个简单的算法。机械臂一般由三节组成,每一节的运动是不一样的,要对机械臂实现定位和良好的控制,假设给手臂的最前端焊枪一个目标位置,那么三节手臂分别该怎么运动,主要是一个坐标变换的问题,就需要在机械臂的坐标系中进行变换,设计出机械臂位置的控制算法,通过MATLAB得出仿真的效果。
关键词:焊接机器人;关节空间定位;MATLAB;运动学分析
Abstract
Robots are highly concerned in today's society and will play an increasingly important role in our industrial production and daily life. Therefore, the research on robots is of vital importance . The prerequisite for the normal operation of the robot is the coordination between the joints, which is the spatial positioning of each joint. Only in this way can the target position be reached for further work. The research on the spatial positioning of the robot joints is the primary condition for the work of the robot. Considering the application of robots in practical industrial production, welding robots occupy a large proportion, and the research on welding robots is of representative significance in the research on robots. So ,this paper takes welding robot as an example. Based on the research on joint space positioning method of welding robot and combined with practical needs, the six-dof robot is taken as the main research object. We first need to conduct three-dimensional modeling and kinematics analysis on the robot. MATLAB is used as the main learning tool, and MATLAB Robotics Toolbox is used for 3d modeling and simulation analysis of joint space positioning of welding robot. Robot kinematics analysis mainly is the forward kinematics and inverse kinematics analysis, through to the welding robot can well know the movement of the robot kinematics analysis, work out a mathematical function relation between each joint, the space position of the transform relation between them, through the function relation of kinematics analysis, easy to write a simple arithmetic. General mechanical arm is composed of three, each section of the movement is not the same, to realize positioning and a good control of mechanical arm, assuming that the front of the arm welding torch a target location, so three arm respectively how to exercise, is mainly a problem of coordinate transformation, you need to transform in the coordinate system of mechanical arm, the design of mechanical arm position control algorithm, through the MATLAB simulation results are obtained.
Keywords: welding robot: joint space positioning; MATLAB; Kinematic analysis
目 录
摘要 I
Abstract II
第一章 绪论 1
1.1焊接机器人研究的背景 1
1.2焊接机器人研究的意义 1
1.3焊接机器人国内外发展现状 2
1.4 基于MATLAB软件的焊接机器人关节空间定位研究方法 3
1.5 论文的组织结构 4
第二章 对焊接机器人的运动学建模 5
2.1 D-H建模 5
2.2 基于MATLAB Robotics Toolbox建立机器人模型 6
第三章 焊接机器人的运动学分析 10
3.1 焊接机器人的正运动学分析 10
3.2 焊接机器人逆运动学分析 13
第四章 焊接机器人关节空间轨迹规划 14
4.1 轨迹规划方法简述 14
4.2 实时插补算法 14
4.3 运用MATLAB对轨迹规划的具体实现 15
第五章 焊接机器人的MATLAB运动学仿真 16
5.1 运用MATLAB Robotics Toolbox设计机器人控制面板 16
5.2 焊接机器人运动学分析 18
5.2.1 对焊接机器人的正运动学分析 18
5.2.2 对焊接机器人的逆运动学分析 20
5.3焊接机器人的轨迹规划 21
第六章 结论 24
参考文献 25
致谢 27
第一章 绪论
1.1焊接机器人研究的背景
焊接机器人的运用源于20世纪中期,主要运用在通用汽车的装配生产线,运用焊接机器人实现汽车的焊接工作。机器人的技术融合电子、机械技术等各种技术;经历了三个过程,示教机器人、离线机器人到目前的智能机器人。在新时代的科技变革潮流中,对焊接机器人的发展也成为了各国关注和竞争的焦点。我国要完成从农业大国到工业大国的转变,对与新时代的工业发展主流也投入了巨大的财力物力,处于工业转型的升级时期,对于机器人这个各种技术高度交叉的新兴工业科技的发展是一次重大机遇,只有抓住了这些科技进步机会,才能跟上科技更新换代的浪潮。同时,随着劳动力的缺乏和成本的不断攀升,机器人的发展在工业领域更是展现了蓬勃的生机,在科技的发展和高劳动力成本的压力下,工业机器人代替人类的部分工作已经成为了工业发展的趋势,也成为中国的重大工业战略。
在始于20世纪中期机器人在汽车装配线上的优异表现之后,这种新兴的工业加工方式迅速传播,很快在美国风行,并且快速在欧洲各国,日本等地方受到极大的关注,现在已经在机械加工、航空航天、电子生产、船舶的生产制造等领域得到了广泛的运用。运用机器人进行工业焊接活动是人类实现焊接自动化的革命性发展,突破了传统的焊接方式,拉开了新一代的技术革命浪潮。
1.2焊接机器人研究的意义
机器人技术是一种高新技术,融合了多种新兴技术,在发展初期,就被视为世界最为引人注目的高新技术之一,在很多的工业生产领域中发挥着不可替代的作用,将成为下一次技术革命的主要技术,在中国也将其作为《中国制造2025规划纲要》中着重提出的发展计划。
随着时代的发展,科技的不断进步,机器人在人类生活和生产中发挥着越来越大的作用,特别是在工业活动中,有着很大的发展空间,由于工业生产对机器人的要求越来越高,对机器人的研究显得很迫切。
机器人的精确工作很多是人类无法比拟的,对于公艺加工有更高的精确度。焊接公艺对焊接工人有很高的技术要求,需要有足够的工作经验、焊接的水平稳定,机器人运用在焊接工作中,只需要对机器人前期的设计做充分,机器人就可以保质保量,高效的完成工作要求;人类在生产过程中会受到各种各样的因素的影响,不能够保证生产水平不受到影响,而机器人在这方面有着很大的优势,能够适应大多数恶劣的环境;生产的质量也能够有很大的保证;生产的周期稳定;只要我们设计得合理,给予一个目标,它就能按照预先设定的程序进行工作,能够有效的提高工作效率;并且部分工作环境充满危险,这时候机器人的作用就显得至关重要,改善了工作人员的劳动条件,减少了工作人员的安全隐患;同时,在运用的工业机器人中,有绝大多数的工业机器人是运用在焊接领域,因此,基于焊接机器人的研究就很具有代表性。
1.3焊接机器人国内外发展现状
国外关于对焊接机器人的研究比中国早,从1959年第一台工业机器人诞生到80年代,发展速度缓慢,直到到了90年代,随着电子技术,计算机技术等新兴技术的高速发展,机器人技术作为各种新兴技术的综合产物,也得到了飞速的发展,特别是在工业焊接领域得到了很大的运用。目前已经发展成了有自我系统的产品,焊接机器人在实际的工业运用中,主要应用在两种焊接方式,即电弧焊以及点焊。
焊接机器人首次在工业上得到运用,主要是在汽车行业,在汽车装配过程中应用于电阻的点焊。目前为止,焊接机器人已经得到了很大的发展,可以完成各种各样的焊接工作,并且焊接的效率和精确度得到了很大的提升。同时,世界各地工业焊接机器人的数量都在不断的提升,发挥着越来越大的作用,在工业生产中已不可或缺。
目前,国外的机器人工业发展迅速,已经将焊接机器人的制造要求标准化,研制了各种系列的焊接机器人,占据了大部分的市场,目前服役的焊接机器人中,可以简单的分为三大类:日系、欧系、美系。日本焊接机器人的生产研发厂家主要有Fanuc、OTC、Motoman等生产商。欧洲的焊接机器人研发生产企业主要代表有德国KUKA,CLOGS,,意大利的企业COMAU以及瑞典的ABB等。美国的Adept Technology企业。
随着各种技术,如电子技术,计算机技术等的不断发展,新型材料的使用,焊接机器人的智能化不断提高,价格也不断降低。
中国的机器人发展相比于国外起步晚,但是中国的焊接机器人应用数量逐年攀升,展示了中国对于焊接机器人需求的巨大潜力与发展活力,推动了我国的焊接机器人技术的研究,随着科技的发展,机器人技术也日趋成熟,早在1985年就研发了第一台焊接机器人“H-Y12”。目前,国内在研发生产焊接机器人比较有代表性的生产厂家主要有沈阳新松、南京埃斯顿等。但是与国外焊接机器人的研发生产还有一定的差距,对于焊接机器人的研究要从核心部件得到突破,尤其是减速机的技术。
1.4 基于MATLAB软件的焊接机器人关节空间定位研究方法
焊接机器人至关重要的一点是对各个关节的准确控制,对各关节的空间位置的定位,这是进行焊接工作准确进行的先决条件。机器人的轨迹有笛卡尔空间以及关节空间,关节空间相比于笛卡尔空间而言,它运算更简单,简化了实验过程,选择关节空间,不需要对于路径点之间的移动形状进行描述,避免了在对机器人关节空间的研究实验中的一些不必要因素,有利于研究的进行。
6自由度机器人有三节机械臂,又分为6个自由度,对于焊接机器人关节空间定位的方法主要是基于各个关节在运动过程中的坐标变换,在机械手臂的坐标系中进行变换,然后设计一个简单的机械臂位置控制算法。这里对焊接机器人的研究主要在于关节的定位,为了研究简便,更加直观,抛开焊接机器人的其余部分,只看焊接机器人的关节,简化了机器人模型。
为了实现对机械臂的控制,运用GUI设计一个机械臂控制器,就可以实现对于机器人关节更直观的控制。通过上述的分析知道关节空间定位的控制主要是坐标变换的问题,在机械臂的坐标系中进行坐标变换,通过对其进行运动学分析,各个机械臂的运动是有紧密的函数联系,根据这个联系编写的控制算法再结合到MATLAB GUI设计一个简单的控制器就可以达到对机械臂的定位控制要求。
在焊接机器人运动的过程中,关键的问题在于如何对机器人每一个个关节进行实时的控制,传统的工业机器人主要是通过对其进行预设插补值,但是这并不能满足对机器人关节实时定位控制的要求。通过运动学分析,推导出各关节角度之间的函数关系式,得到它们之间的联系,当设置起始点便可以推算出终点的空间位置,或者通过终点位置推算出其他5个关节点的关节角度。通过这个关系,可以编写出一个简单的关节空间位置定位算法,进而可以实现对焊接机器人关节空间的定位,对传统的控制方式有了一定的改善。
机器人机械臂的运动主要是坐标系的变换,又与关节的角度值得变化密不可分,我们可以通过建立数学模型,分析出各个机器人关节之间的函数关系式,通过函数关系式进行离线编程,然后,将离线程序结合MATLAB的功能,设计一个控制器,验证所编写的离线程序的准确性,完成对关节空间的控制及定位。
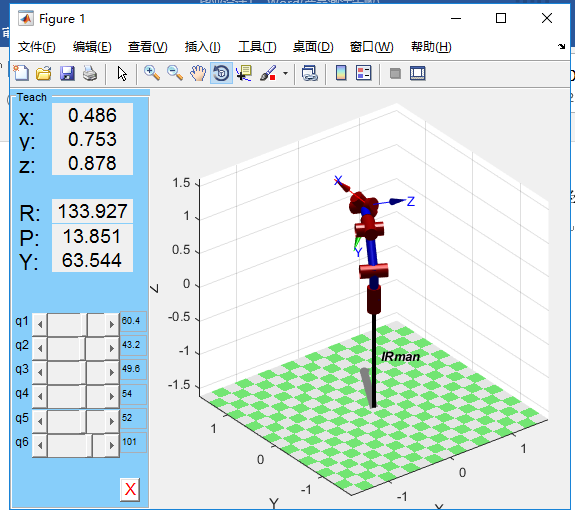
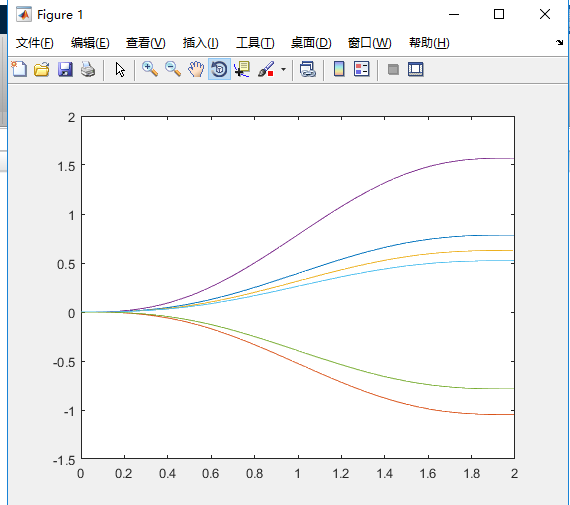
利用MATLAB进行仿真。对机器人进行正逆运动学的仿真时实现机器人关节空间定位的主要步骤。MATLAB具有强大的功能,将MATLAB的功能运用到机器人领域,通过先进行的模拟仿真,能减少实际工作时出现的问题,为了更好的对理论进行模拟验证,可以结合MATLAB Robotics Toolbox来建立三维模型,通过简单的MATLAB程序可以直观的建立一个6自由度机器人模型,再运用MATLAB中的GUI建立仿真界面,将上述编写的控制算法利用MATLAB运行,对机器人的关节空间运动进行仿真控制,对得出的仿真图形或数据进行分析,验证机器人关节空间定位方法的准确性。
1.5 论文的组织结构
本文论文主要是对焊接机器人关节空间定位的方法研究。
通过利用MATLAB软件对焊接机器人建立仿真模型,结合机器人的正逆运动学分析,推导出关节空间位置变化之间的函数联系;然后对机器人的运动轨迹进行规划;然后,根据上述的分析结果,得出控制的程序算法,然后带入到MATLAB中,这里主要使用Robotics Toolbox中的函数,进行程序运行,得出机械臂控制器,通过控制器对机器人关节空间定位,得出位置变化的结果,MATLAB可以将结果直观的显示出来。
研究表明,利用MATLAB软件,结合机器人工具箱的程序控制实现对机器人关节空间的定位。
第二章 对焊接机器人的运动学建模
为了对焊接机器人更好的学习和研究,建立机器人的模型是实验的基础前提,在本章节中,将运用MATLAB强大的图形功能,建立一个简单的三维模型,基于更好的对目标进行研究,将其他的一些结构参数进行简化,着重于机器人关节空间的位置关系和基本结构的参数,对焊接机器人的机械臂建立仿真模型。
机器人的学习在实验的过程中一直是重点难点,实物机器人大多数价格昂贵,体积大,不利于对机器人的课题研究和学习,而且操作一般相对复杂,需要较高的技术操作技术,操作在一定程度上来说,限制了在机器人课题的研究。基于机器人模型的简化,突触研究的问题的目的,需要建立一个建立的机器人仿真模型。对机器人的关节空间定位研究中,主要的问题是控制三节机械手臂的运动过程坐标的变换,以6自由度机器人为例,自由度越高运动越复杂,所以在建立机械臂模型控制其运动时也更复杂,为了更好地进行实验,发展出了各种机器人仿真系统,本文选择MATLAB Robotics Toolbox为主要工具,来对机器人进行建模与仿真学习。MATLAB Robotics Toolbox是基于MATLAB平台开发出来的机器人工具箱,为机器人的研究提供了完善的设计和仿真环境,并且可以对机器人的运动结果进行图形和数据分析。本文就是基于MATLAB Robotics Toolbox对机器人关节空间定位控制进行建模和仿真的,在一定程度上大大的提高了机器人关节运动研究的效率,通过其得出的图像有利于更直观的分析机器人运动情况和运动空间。
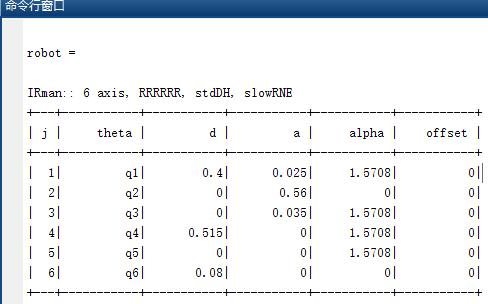
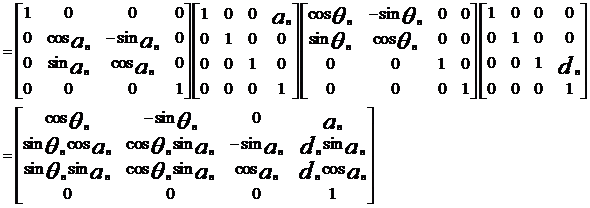
为了使建立的仿真模型更好的对进行的机器人运动过程中的坐标变换进行研究,这里采用D-H法来建立机器人模型,将各个关节的坐标变换用4个的参数就可以描述出来,即:绕X轴的旋转角alpha;绕X轴的平移距离a;绕Z轴的平移距离d;绕Z轴的旋转角theta。大大的减少了实验参数,可以更有利由于对焊接机器人关节空间位姿定位的研究,减少了实验过程的计算,降低了复杂度,提高了准确性。
2.1 D-H建模
在对机器人进行建模的方法中,常用的方法是利用D-H(Denavit-Hartenberg)建模的方法。机器人有三节机械臂,每一节的运动是各不相同的,在机器人建模的空间坐标系中,我们这里的主要研究对象为6个自由度的焊接机器人,6个关节都为旋转关节,这6个自由度主要是有6个旋转自由度构成,它们是两两互相垂直的关系,构成了欧几里得空间。机器人的自由度越多,运动的过程也就越复杂,越接近于人体,为了在进行机器人学习中的简单化,运用这个方法进行机器人建模,具有能减少参数、并且满足机器人学的最小线性表示约定的优点。
D-H法在建立机器人模型中有很大的优势,可以用来建立任何一种构型的机器人,可以忽略机器人结构的复杂程度的影响。基于此,需要建立一个参考坐标系,基本的步骤为从一个连杆坐标系转换到下一个坐标,依次直到最后一个执行机构,实现坐标的变换,然后一步步演算出总的变换矩阵,从而得出机器人运动学方程 。
。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: