跑步机调速控制系统设计毕业论文
2020-02-18 11:05:40
摘 要
近年来,人们的生活水平越来越高,对身体健康的需求也越来越高。电动跑步机已被广泛用作重要的健身器材。传统的跑步机采用永磁直流有刷电机调速,但电机容量有限,噪音大,可靠性不高高缺点促使人们寻找低噪音,高可靠性和高效率的驱动电机。而无刷直流电机相较于有刷直流电机具有小体积,轻便,高效和高可靠性的优点,所以,我们采用无刷直流电机取代传统的有刷直流电机作为跑步机驱动电机。
本次课题研究我们把内置霍尔位置传感器的无刷直流电机作为控制对象,提出一种基于芯片TMS320LF2407A的无刷直流电动机调速系统,采用TMS320LF2407A系列芯片用于设计速度控制系统,可以简化系统结构、降低系统成本、提高系统性能,满足更多应用的需求。
在本次设计过程中,首先,建立了无刷直流电机的数学模型。接着,提出了一种用于无刷直流电动机位置、转速和电流的三闭环数字控制方案,设计了包括霍尔位置传感器状态检测电路、电流检测电路和保护电路在内的控制电路。整个系统的硬件设计采取了许多措施来提高系统的可靠性。然后,基于系统的硬件设计,主程序设计采用专业开发工具进行。
关键词: 跑步机、无刷直流电动机、速度控制系统、调速设计。
ABSTRACT
In recent years, people's living standards have become higher and higher, and the demand for physical health has become higher and higher. Electric treadmills have been widely used as important fitness equipment. The traditional treadmill adopts permanent magnet DC brush motor speed regulation, but the motor capacity is limited, the noise is high, and the reliability is not high, which makes people look for low noise, high reliability and high efficiency drive motor. Brushless DC motors have the advantages of small size, light weight, high efficiency and high reliability compared to brushed DC motors. Therefore, we use a brushless DC motor to replace the traditional brushed DC motor as a treadmill drive motor.
In this research, we use the brushless DC motor with built-in Hall position sensor as the control object, and propose a brushless DC motor speed control system based on the chip TMS320LF2407A. The TMS320LF2407A series chip is used to design the speed control system, which can simplify the system structure. Reduce system cost, improve system performance, and meet the needs of more applications.
In this design process, first, a mathematical model of the brushless DC motor was established. Then, a three-closed loop digital control scheme for position, speed and current of brushless DC motor is proposed. The control circuit including Hall position sensor state detection circuit, current detection circuit and protection circuit is designed. The hardware design of the entire system has taken many measures to improve the reliability of the system. Then, based on the hardware design of the system, the main program design is carried out using professional development tools.
Keywords: Treadmill, brushless dc motor,Speed control system, speed control design
目 录
摘 要 Ⅰ
ABSTRACT Ⅱ
第1章 绪论 2
1.1 引言 2
1.2 课题研究的意义 2
1.3 国内外研究现状 3
1.4 主要研究内容 4
第2章 电动跑步机的驱动和调速 5
2.1 电动跑步机的需求分析 5
2.2 电动跑步机的驱动方式 6
2.3 电动跑步机调速特点分析 7
2.4 本章小结 9
第3章 基于DSP的无刷直流电机控制 10
3.1 关于TMS320LF2407A DSP芯片 10
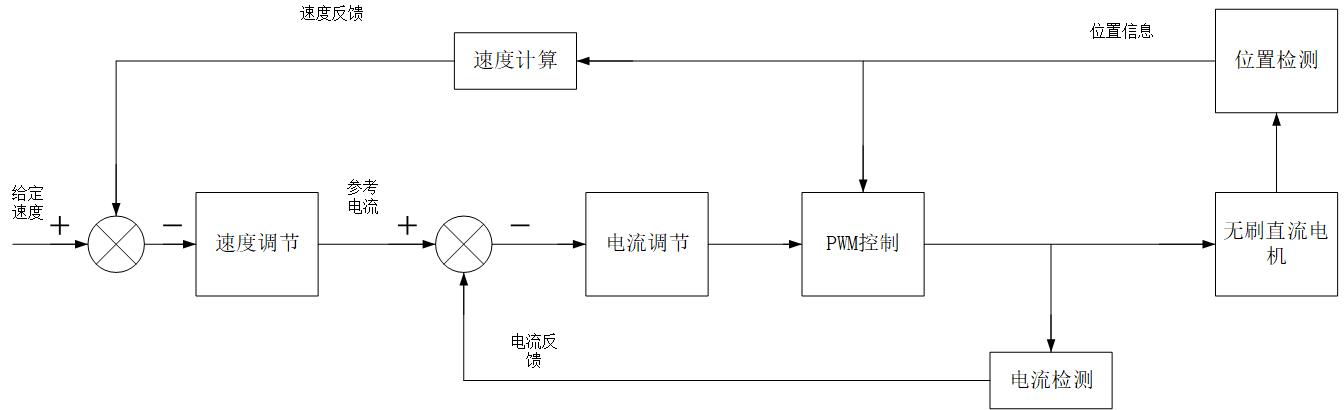
3.2 基于DSP的无刷直流电动机调速系统的控制 10
3.3 转速调节和电流调节 12
3.4 无刷直流电动机的电流、位置、速度检测 13
3.5 本章小结 15
第4章 调速系统硬件电路设计 16
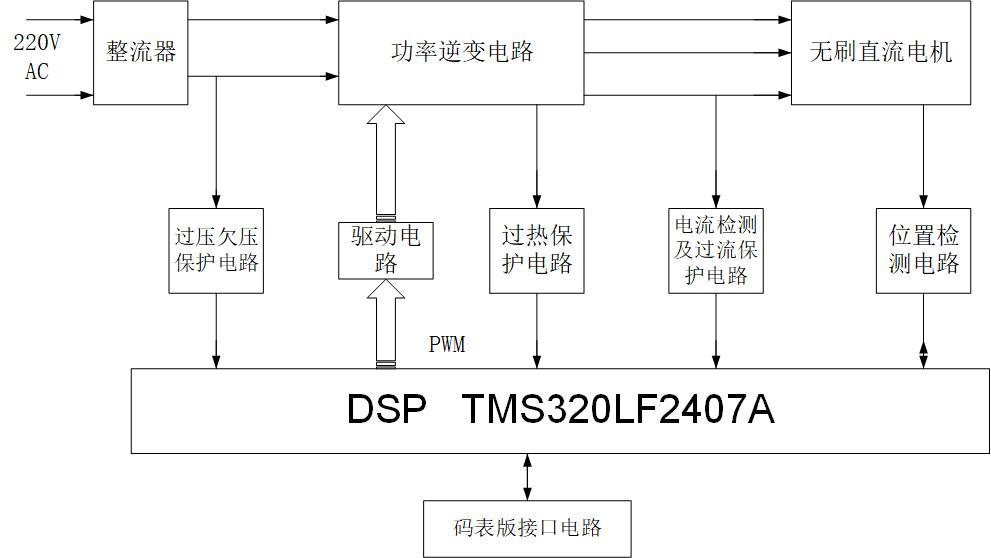
4.1 调速系统的总体设计 16
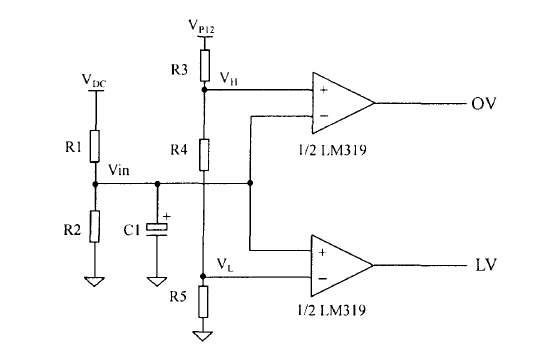
4.2 功率逆变及其驱动电路的设计 16
4.3 系统保护电路的设计 18
4.4 本章小结 20
第5章 系统软件设计 21
5.1 DSP的软硬件开发工具 21
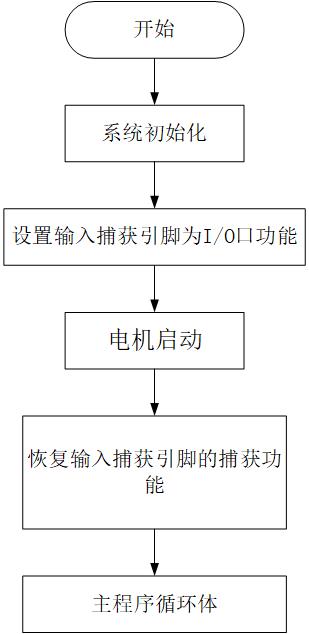
5.2 主程序设计 21
5.3 中断服务子程序设计 22
5.4 本章小结 25
第6章 总结及展望 26
6.1 全文总结 26
6.2 展望 26
致 谢 27
参考文献 29
第1章 绪论
1.1 引言
作为家庭和健身房的常备设备,电动跑步机现在是家用健身器材中最常用的,也是家用健身器材的最佳选择。世界上第一台跑步机诞生于1875年,发明者是美国东部的机械师[1]。这台机器实际上是一种便携式农业机械,以牲畜为动力源。 1866年,纽约州通过了美国禁止虐待动物的第一部法律,并且使用鞭子打击动物被认为是非法的。 “美国反动物动物组织”指责这些攀爬型动力装置伤害动物的膝盖并对动物施加心理压力。后来,有人发明了水平跑步机,其输送带与地面平行,动物在它上面行走,好像它们正常行走一样[1]。现代意义上的跑步机从20世纪80年代发展到第四代。第一代机械跑步机是通过圆形辊的组合布置的操作平台。主要的运动方式是依靠跑步者的脚和跑步带之间的摩擦来实现跑步和行走。第二代跑步机是一种模拟电动跑步机,可为原装第一代增加电机驱动和提升装置,以及计算机控制程序和传感器,可传输和接收电机信号并使用计算机控制程序。调整跑步机的速度,坡度,距离等功能。第三代跑步机数字跑步机基于原有的第二代跑步机取下传感器,并利用单片机的数据来控制电机的工作状态。它不受外界干扰,使跑步机运动更加稳定和安全。第四代跑步机是一种数字变频技术,它使用HK逆变器和交流电机构成跑步机的动力系统。由于交流电机结构中没有碳刷,因此终身不需要维护,因此第四代频率跑步机更安全,更耐用。更安静,更节能,更稳定的五大优势使跑步机运动真正超越了传统的户外跑步[1][2]。
1.2 课题研究的意义
生命就是锻炼,健康来自锻炼。如今,跑步是一项非常受欢迎的有氧运动。它在医学和体育界备受推崇。它是维持我们身心健康的最有效和最科学的方法。作为家庭和健身房的常备设备,电动跑步机是当今家庭健身器材中最简单的一种。它是家庭健身器材的最佳选择。本次设计的任务是设计电动跑步机的速度控制系统,设计包括速度控制和控制系统的设计。由于跑步机的特殊性,安全问题更受关注。如何正确使用跑步机与跑步机的维护同样重要[3]。对于跑步机的控制系统,无刷直流电动机取代了传统直流电动机的机械换向。无刷直流电动机不仅具有调速范围性能高,效率高的优点,而且具有维护方便,交流电动机运行可靠的优点 [4]。
本次设计的主要意义就是运用无刷直流电机来实现对电动跑步机的控制,从而达到我们需要的目的,实现对电动跑步机的研究。
1.3 国内外研究现状
跑步机是健康设备产品,并且跑步机驱动电动机必须由具有各种重量的人使用。使用跑步机的目的通常是两个:健身和减肥;如果它被减肥者使用,因为它们很胖并且运行速度快,驱动电机的低速必须以高扭矩使用。相反,健美运动员跑得快,但重量轻,所以高速时的扭矩需求很小;跑步机必须适合家庭中的每个人,因此速度范围应宽,低速扭矩应大,以满足不同重量的人使用。大多数跑步机中使用的驱动单元是直流有刷电机,其具有便宜的优点,跑步机的双面宽跑带给人以草坪般的感觉,坚固的钢架和防护装置确保用户安全可靠,电动跑步机让人们在忙碌时享受运动。[5]。
未来越来越多的人集中在城市,在有限的空间锻炼已成为城市居民的最佳选择。据互联网介绍,我们知道在跑步机控制系统中,直流有刷电机被用作国内外低端市场电动跑步机的驱动电机。这些电机的功率在1.5马力和2.0马力之间,适用于脉冲宽度调制技术。它们存在以下问题:过大的机械噪音,过短的工作时间,过高的维护成本和太短的使用寿命。在高端市场,大多数驱动电机都使用交流电机。大部分功率约为3.0,适用于矢量控制变频技术。其中一些将电机功率提高了10%,范围从0%变为15%。当然,该系统具有高性能,但高成本限制了其市场。[6,7]。
另外,由于价格和性能的相互制约,国内外控制系统没有实质性的突破。一般来说,发展趋向于智能化方向,而跑步机同时具有各种功能 [8,9]。
在国外,低成本的8位单片机AT89C2051被用作核心单元,形成直流有刷电机的速度控制系统。电刷电机采用脉冲宽度调制调节速度,通过软件编程改变控制算法,增加了控制的灵活性和高性价比[10,11]。
作为最早的电动机,有刷直流电动机广泛应用于工农业生产的各个领域。它在需要调速的应用中起着重要作用,但机械换向装置的存在限制了其开发和应用的范围。直流电动机的机械刷和换向器受到强制接触,导致结构复杂,可靠性差,火花和噪声高等一系列问题。影响直流电机的调速精度和性能。科学技术的飞速发展带来了半导体技术的飞跃。1955年,美国人首先提出用晶体管换向线代替机械换向装置。经过反复试验,人们终于找到了一种机械换向装置,用一个位置传感器和一个电子换向线代替了有刷直流电机[2][12]。已经有磁电耦合器,光电和霍尔元件作为无刷直流电机的位置传感器。因此,存在没有位置传感器的电动机,其通过观察电枢绕组中的不同功率波形来监测转子的位置。20世纪80年代初,无刷直流电动机进入实用阶段,成功开发出方波和正弦波无刷直流电动机[3][13]。“无刷直流电动机”的概念已从具有电子相位转换器的初始直流电动机发展为具有传统直流电动机的外部特性的电子整流电动机。如今,无刷直流电动机将电动机,变速机构,检测部件,控制软件和硬件集成到新一代电动调速系统中。无刷直流电机具有最优越的调速性能,主要表现在方便的调速,宽调速范围和良好的低速性能。从工业到民用的应用极为广泛,如电动自行车,电动车,电梯,抽油烟机,数控机床,机器人等产品[4][14]。
由于无刷直流电机具有以上所述的这些优点,在2004年的国际电机会议上有专家学者就大胆提出了有刷电机将被无刷电机取代这一发展趋势。在工业自动化领域中,美、日、英、德等国家已经实现了以无刷直流电机代替有刷电动机的转换[15]。所以说,现在的电动跑步机使用无刷直流电动机作为驱动电机是十分适合的。
1.4 主要研究内容
用于电动跑步机的无刷直流电动机需要高效率,高功率密度,大输出扭矩和宽速度范围。对于这种驱动性能要求,应从系统角度全面设计控制方法和电机系统。
本文重点研究了电动跑步机无刷直流电机调速系统的分析与设计,为无刷直流电机调速系统在电动跑步机上的应用提供了依据。基于这一基本思想,本文主要研究了无刷直流电动机的系统结构,工作原理和控制方法。在此基础上,以公司的电机控制芯片为控制核心,设计了无刷直流电机的数字闭环速度控制系统。包括系统软硬件设计,以及系统的调试和分析。
第2章 电动跑步机的驱动和调速
2.1 电动跑步机的需求分析
随着生活水平的提高,人们对健身的意识也不断提高,对高质量生活也有了更多的选择。由于城市生活节奏加快和局限性,跑步机,这一结构简单又使用方便的健生器材正越来越成为人们生活中不可或缺的一部分,相较于传统户外长跑运动方式而言,电动跑步机拥有太多优点。现如今的环境污染已经成为一个让人头痛的问题,加上平时生活和工作上的压力,我们并没有那么多的时间和精力去走出门进行户外运动,电动跑步机不仅满足了我们对于运动健身的要求,同时作为室内器材可以让我们免受汽车尾气和大气污染的侵袭,而且还可以减少疲劳感,增加能量消耗。总之,各个方面的原因造就了电动跑步机越来越成为现代人们生活中很重要的一项运动方式,由此也给电动跑步机的发展带来了广阔的远景。
由于其简单的直流电机控制系统和快速响应,原始跑步机广泛用于直流电机的速度调节。但是,直流电机使用电刷和换向器进行电流换向,从而产生火花和磨损。这限制了它在健身房的专业跑步机上的推广。为了满足相同的性能规格,当使用交流电动机时,控制复杂并且总成本高。由无刷直流电机组成的驱动控制系统结合了性能和成本,并在专业跑步机和家用小型跑步机上得到广泛推广。
基于以上原因,我们最终选择了永磁无刷直流电机作为跑步机的驱动电机。
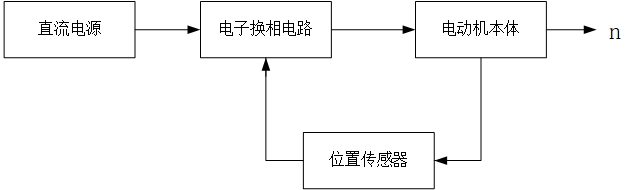
图2-1 无刷直流电动机原理框图
可以考虑使用无刷直流电动机用电子换向装置代替机械换向直流电动机。如图2-1所示,无刷直流电动机主要由电动机本体,转子位置传感器和电子换向电路组成。无刷直流电机在结构和控制方面与传统直流电机有许多相似之处。电枢由具有多相绕组的定子代替,电刷和机械换向器由电子换向电路代替,该电子换向电路由固态逆变器和轴位置检测器组成。无刷直流电动机的操作与电子换向电路不可分离,并且直流电源通过换向电路向电动机的定子绕组供电。位置传感器随时检测转子的位置,并根据转子的位置信号控制开关的导通和停用。这可以自动控制哪些绕组通电,哪些绕组断电以进行电子换向。
电动机本体包括两个部分,定子和转子。转子由永磁体激励,定子绕组则采用交流绕组的形式,通常具有多相三相,四相,五相,转子由极对中的一定数量的永磁体组成。期望在定子绕组中具有顶部宽度的梯形波,因此绕组形式通常是全范围的,集中的或接近于对象的集中形式,以便保持其他谐波。无刷直流电动机的转子结构不同于传统的内转子结构和新的结构形式,例如近年来出现的盘结构,外转子结构和线性结构。不同的转子磁路结构具有不同的操作性能,控制系统,制造工艺和合适的应用。
2.2 电动跑步机的驱动方式
无刷直流电动机具有各种结构,按照不同相数可以分为三相,四相和五相无刷直流电机,每个电动机又可以分为半桥驱动和全桥驱动两种驱动方式。当驱动整个桥时,电机绕组可分为星形和三角形连接以及不同的通电模式,即同时通电的相数。所以有很多不同的选择。不同绕组连接和驱动模式的选择将导致电机的性能和电机成本不一样,主要有以下三个方面:
1)各个绕组的利用效率:无刷直流电动机的各个绕组通电具有间接性。从这个角度来说,三者优于四者,第四者优于五者,而整个桥梁优于一半。
2)转矩的波动情况:无刷直流电动机的转矩输出波动相较于各种普通直流电机而言,其转矩输出波动会比较大,所以我们都希望最小化转矩脉动。然而相位数越多,转矩波动越小,所以全桥驱动器的转矩波动小于半桥驱动器。
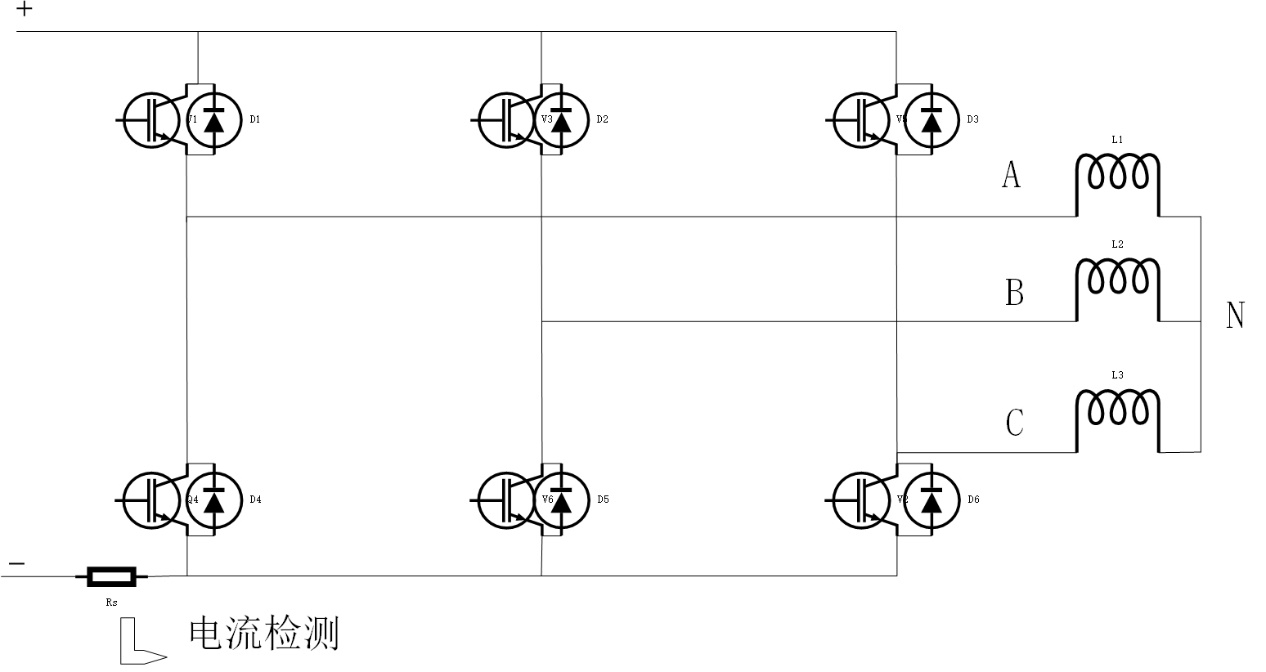
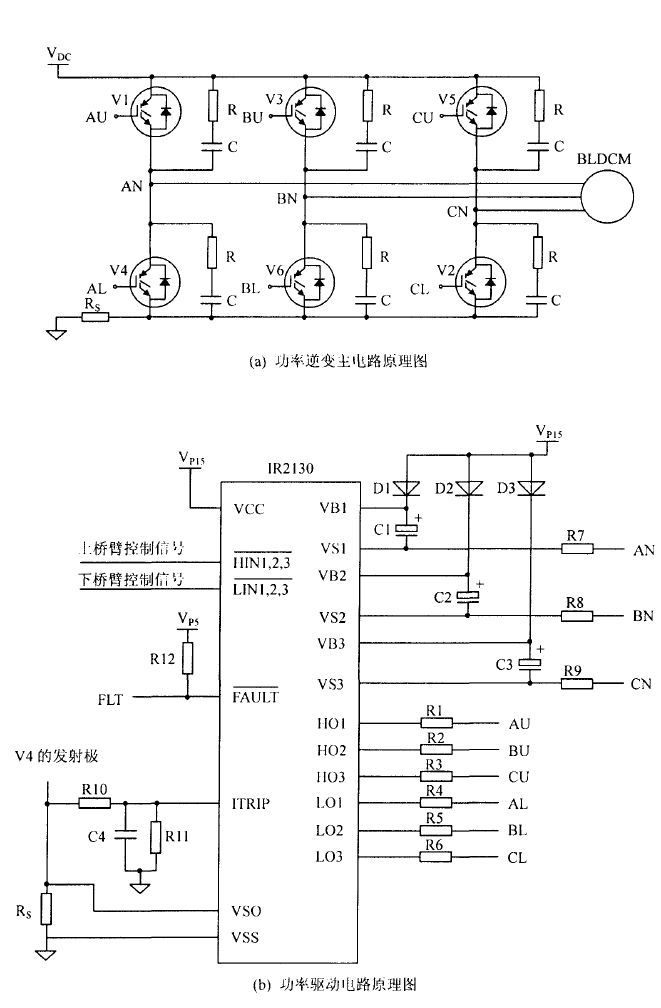
3)驱动电路的成本高低:相位数越多,驱动电路所需的开关晶体管就越多于全桥驱动器,全桥驱动电路开关数量是半桥驱动电路中使用的开关的两倍,在其他部件数量都相同的情况下,开关数量越多的话相应的电路成本也就会越高。而且电动机相的数量越多,那么相应的电动机体的结构也就会越复杂,成本随之越高。综合考虑以上这些因素,三相全桥星形连接驱动模式是使用范围最广泛的。其结构图如图2-2所示。
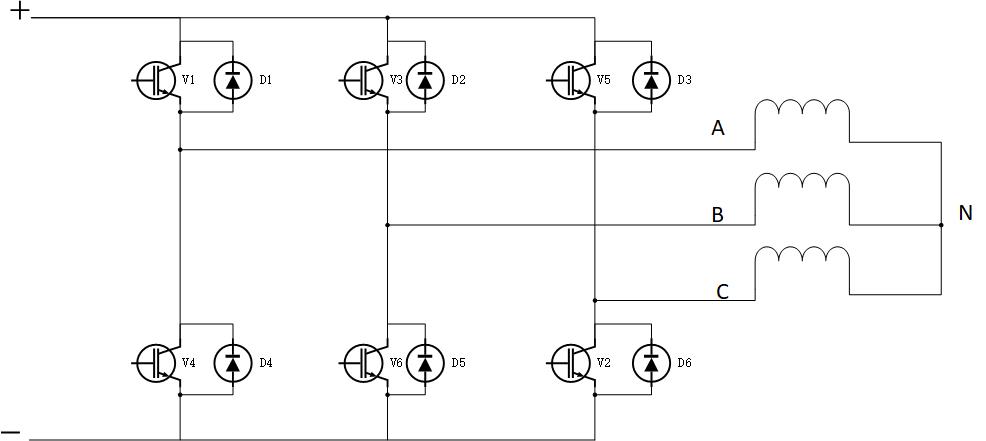
图2-2 三相无刷直流电动机星形连接全桥驱动电路
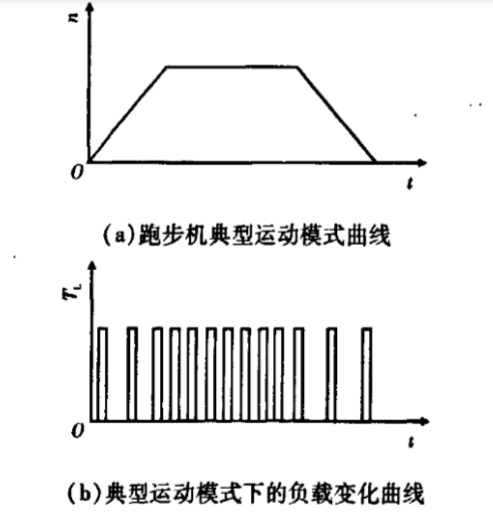
2.3 电动跑步机调速特点分析
无刷直流电机的调速原理:在理想情况下,任何时刻只有两相定子绕组通电,我们这里可以令加在两相通电绕组上的平均电压为,则相应电压的平衡方程为
=2 (2-1)
式中代表回路等效电阻,它是电机两相电阻和管压降两者的的等效电阻。
从而可得:
(2-2)
进行拉氏变换得:
(2-3)
这样我们可以得到无刷直流电动机的动态结构图,如图2-3所示:
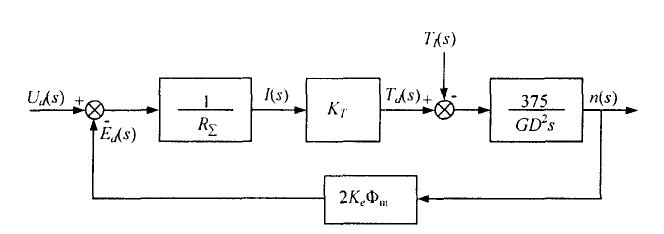
图2-3无刷直流电机动态结构图
可求得其传递函数为:
(2-4)
式中为电动势传递系数,;
为转矩传递系数,
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: