永磁同步电机高频注入驱动系统转子位置误差分析与补偿策略毕业论文
2020-02-18 11:06:05
摘 要
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)由于具有诸多优点被广泛应用于伺服系统等领域。其矢量控制系统需要获取实时的转子位置信息来实现精准的控制,传统的PMSM利用机械式位置传感器来获取转子位置信息,这种方式既会受到安装位置的制约,也会增加安装成本,降低系统可靠性。而PMSM无位置传感器可以完美地避开这些因素所带来的影响,因此,无传感器矢量控制技术成为了热点研究问题。
高频注入法是一种适用于 零速或低速运行的有效的矢量控制技术方案,这种方法利用的是PMSM的凸极效应,从高频电压信号激励下的高频响应电流中提取转子位置信息。然而,因为电机在制作工艺上的误差使得实际当中PMSM的电感并非随转子位置呈理想的正弦型分布,电感中包含复杂的高次谐波成分而导致电机呈现为多重凸极,影响转子位置的观测。同时,当PMSM运行在重载状态下时,此时磁路工作在饱和状态下,由于交电
零速或低速运行的有效的矢量控制技术方案,这种方法利用的是PMSM的凸极效应,从高频电压信号激励下的高频响应电流中提取转子位置信息。然而,因为电机在制作工艺上的误差使得实际当中PMSM的电感并非随转子位置呈理想的正弦型分布,电感中包含复杂的高次谐波成分而导致电机呈现为多重凸极,影响转子位置的观测。同时,当PMSM运行在重载状态下时,此时磁路工作在饱和状态下,由于交电 产生的交轴枢反的存在,电机的合成磁场不再跟转子的直轴重合,而是因为磁场的畸变而发生了一定量的偏转,即磁场的
产生的交轴枢反的存在,电机的合成磁场不再跟转子的直轴重合,而是因为磁场的畸变而发生了一定量的偏转,即磁场的 轴偏离了机械位置
轴偏离了机械位置 轴,使得交、直轴间具有耦合作用从而影响高频注入法下对转子位置的观测。针对这些问题,本文主要工作内容及创新工作内容如下:
轴,使得交、直轴间具有耦合作用从而影响高频注入法下对转子位置的观测。针对这些问题,本文主要工作内容及创新工作内容如下:
分析了PMSM在各个轴系下的数学模型,介绍了高频电压注入法的基本原理及转子位置信息的处理,设计了一种改进的正交锁相环观测器以抑制转子位置观测中四次电感引起的六次脉动误差,研究了一种交叉耦合效应的补偿策略以有效补偿交叉耦合角,并对这些转子位置误差补偿方案进行了基于MATLAB的仿真分析。
关键词:永磁同步电机;高频电压注入法;多重凸极;交叉耦合效应
Abstract
Permanent Magnet Synchronous Motor (PMSM) is widely used in servo systems and other fields due to its many advantages. Its vector control system needs to obtain real-time rotor position information to achieve accurate control. Traditional PMSM USES mechanical position sensor to obtain rotor position information, which will not only be restricted by the installation location, but also increase the installation cost and reduce the reliability of the system. PMSM sensorless position can avoid the influence of these factors perfectly, so sensorless vector control technology has become a hot research issue.
High frequency injection method is an effective vector control technology scheme suitable for zero or low speed operation. This method utilizes the salient pole effect of PMSM to extract rotor position information from high frequency response current excited by high frequency voltage signal. However, due to the manufacturing process error of the motor, the inductance of PMSM in practice does not show an ideal sinusoidal distribution with the rotor position. The inductance contains complex high-order harmonic components, so the motor presents as multiple salient poles, which affects the observation of the rotor position. At the same time, when the all-digital fuzzy operation under overload condition, the magnetic circuit working in saturated state, because of the quadrature axis current produced by the existence of the quadrature axis armature reaction, synthesis of magnetic field of the motor is no longer with the rotor's straight axle load, but because of the distortion of the magnetic field and a certain amount of deflection, the magnetic field of the axial deviation from the mechanical shaft location, pay, direct axis by coupling action between a influence under high frequency injection method of rotor position. In view of these problems, the main work contents and innovative work contents of this paper are as follows:
Analyzed the all-digital fuzzy in each mathematical model in the case of shaft system, introduces the basic principle of high frequency voltage injection method and process of rotor position information, an improved orthogonal design phase-locked loop to restrain rotor position observation in four to six pulse error caused by the inductance, study a cross coupling effect of the compensation strategy to effectively compensate the cross coupling Angle, and the rotor position error compensation scheme based on MATLAB simulation analysis.
Keywords: permanent magnet synchronous motor; High frequency voltage injection method; Multiple salient poles; Cross coupling effect
目 录
摘 要 III
Abstract IV
第1章 绪论 1
1.1研究背景及意义 1
1.2国内外研究现状 1
1.2.1基于高频信号注入的无位置传感器控制技术研究现状 2
1.2.2 转子位置观测误差补偿策略研究现状 3
第2章 永磁同步电机数学模型 5
2.1在三相静止坐标系下的PMSM数学模型 5
2.2 空间坐标变换 6
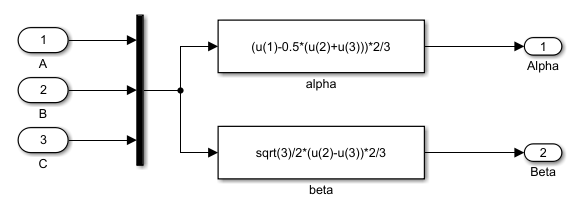
2.2.1 Clarke变换 7
2.2.2 Park变换 8
2.3 PMSM在两相静止坐标系下的数学模型 8
2.4 PMSM在同步旋转坐标系下的数学模型 9
2.5 本章小结 10
第3章 永磁同步电机矢量控制 11
3.1 PMSM矢量控制算法 11
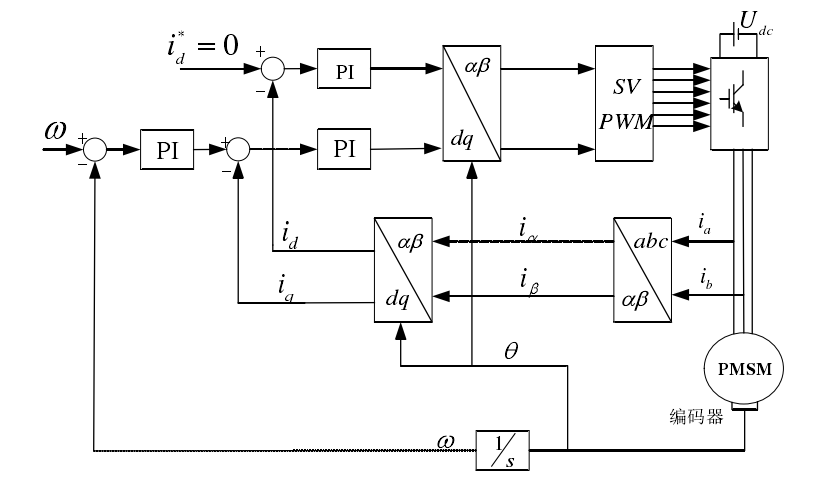
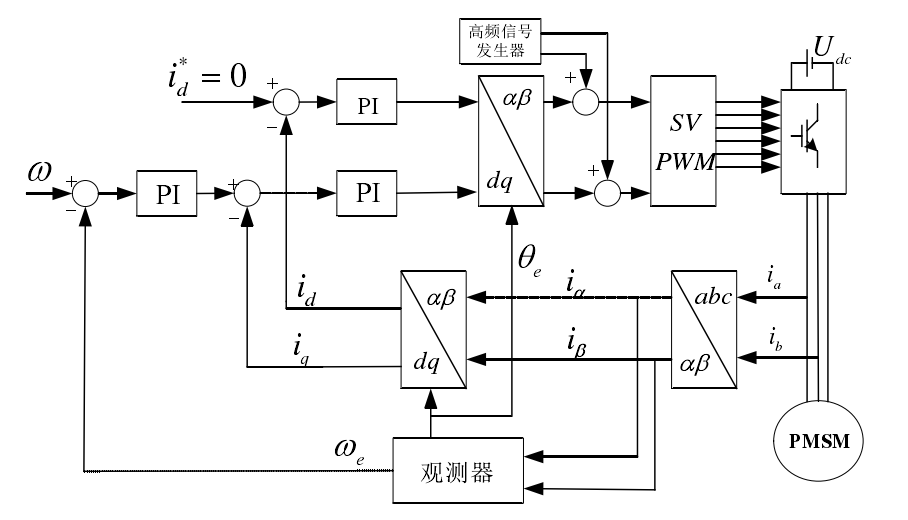
3.2 PMSM矢量控制系统框图 12
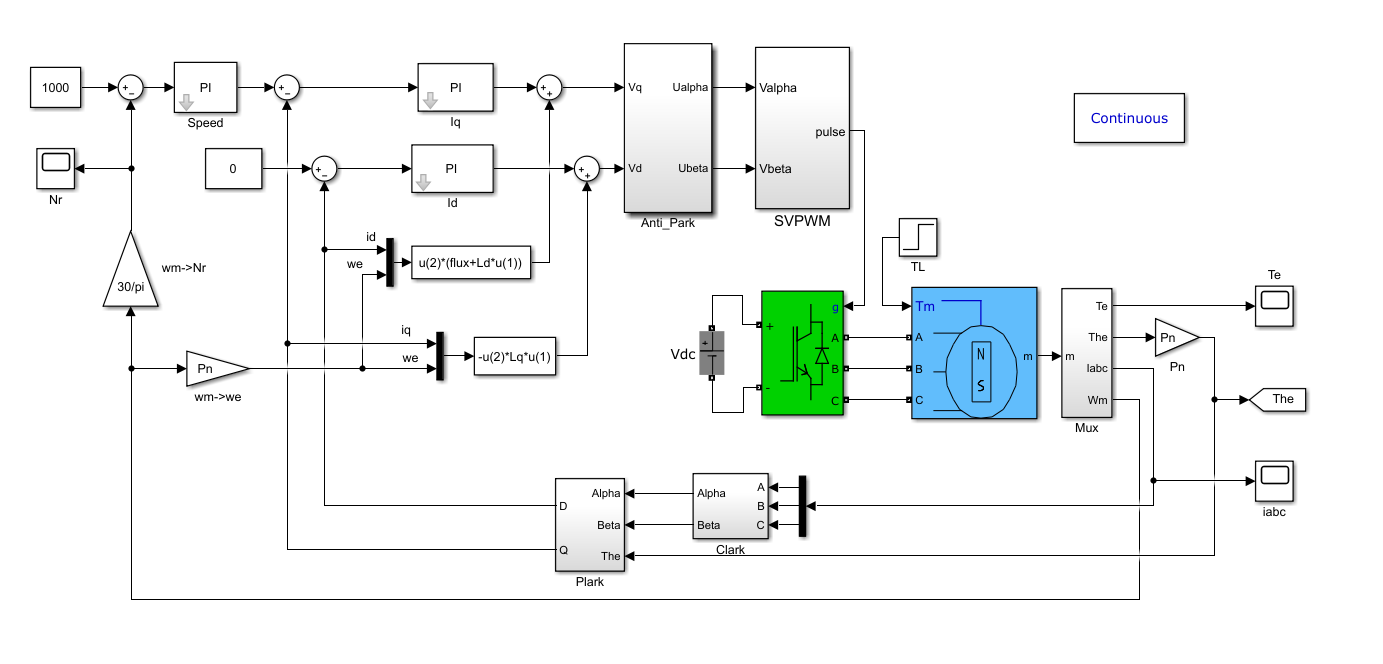
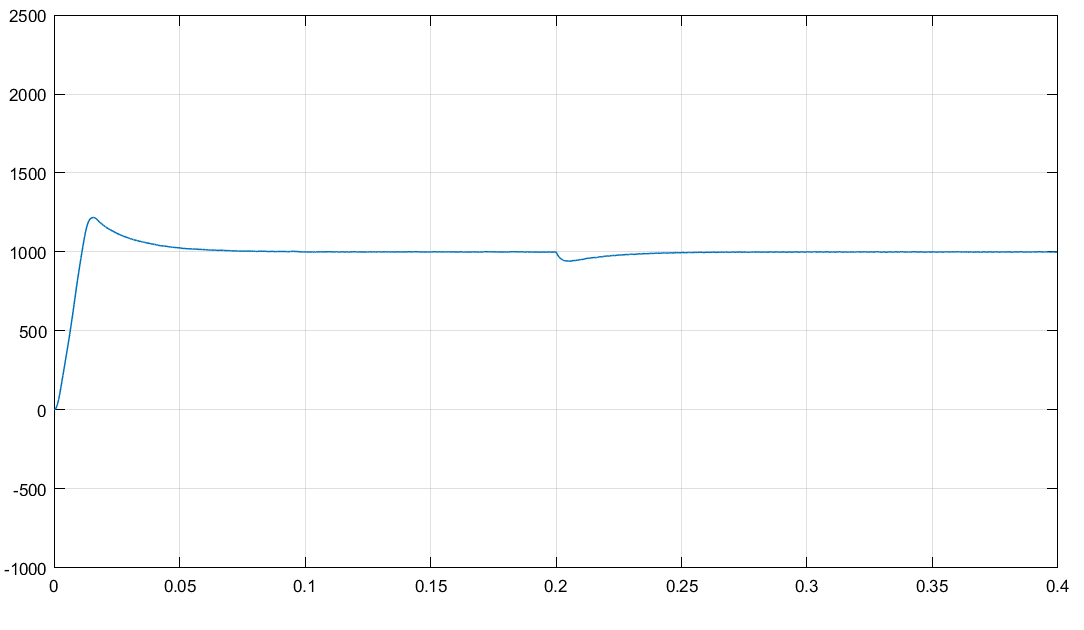
3.3 PMSM矢量控制系统的仿真建模 13
3.4 本章小结 16
第4章 基于高频电压信号注入的PMSM无位置传器矢量控制策略 17
4.1 高频信号注入法的基本原理 17
4.2 高频信号注入下的PMSM数学模型 18
4.3 高频信号注入法位置信息的提取 18
4.4 观测器设计 23
4.5 本章小结 24
第5章 磁场畸变对位置观测的影响及补偿策略 25
5.1 考虑磁场畸变的PMSM的数学模型 25
5.2 多重凸极效应对转子位置观测的影响及补偿策略 26
5.2.1 多重凸极效应对转子位置观测的影响 26
5.2.2 转子位置误差补偿观测器设计 30
5.3交叉耦合效应对转子位置观测的影响及补偿策略 33
5.3.1 交叉耦合效应对转子位置观测的影响 33
5.3.2 交叉耦合效应的补偿策略 35
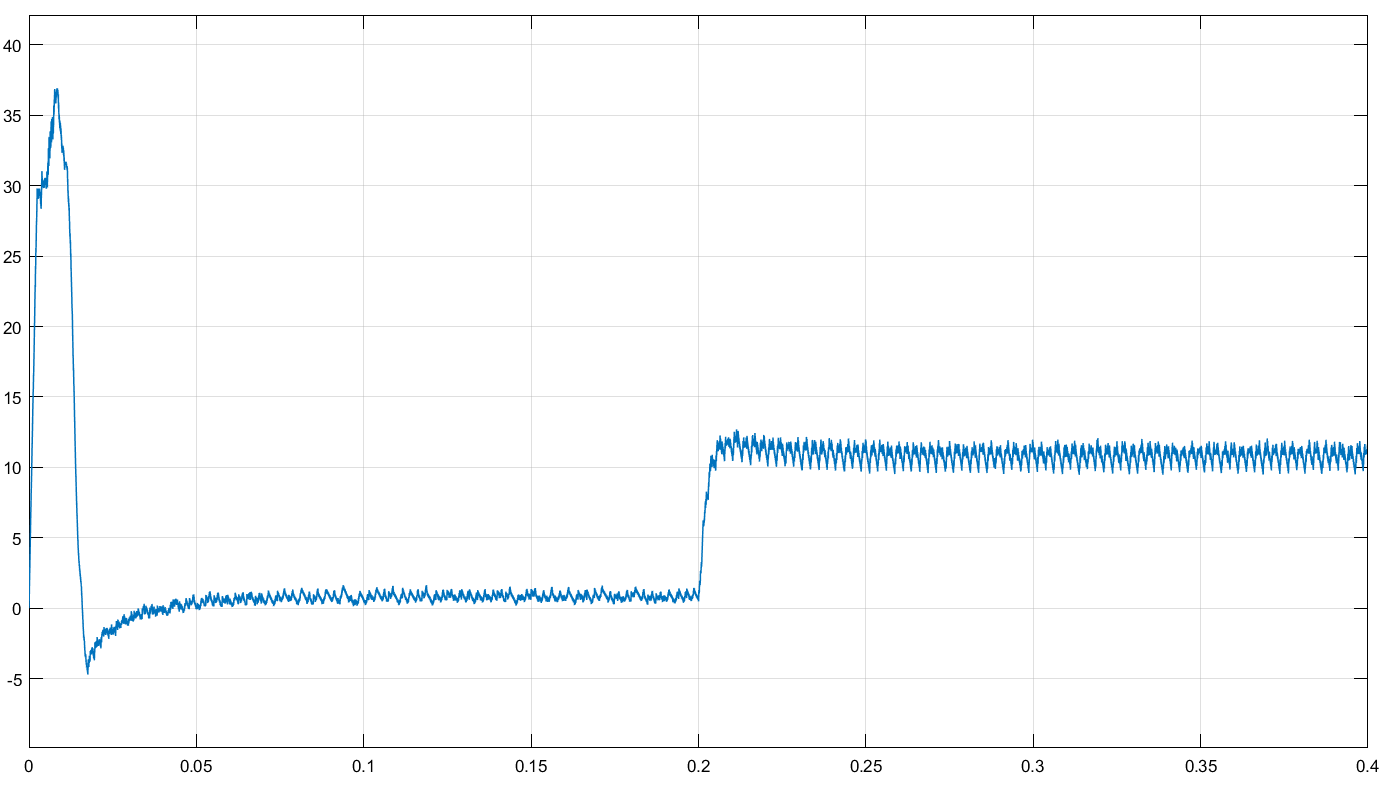
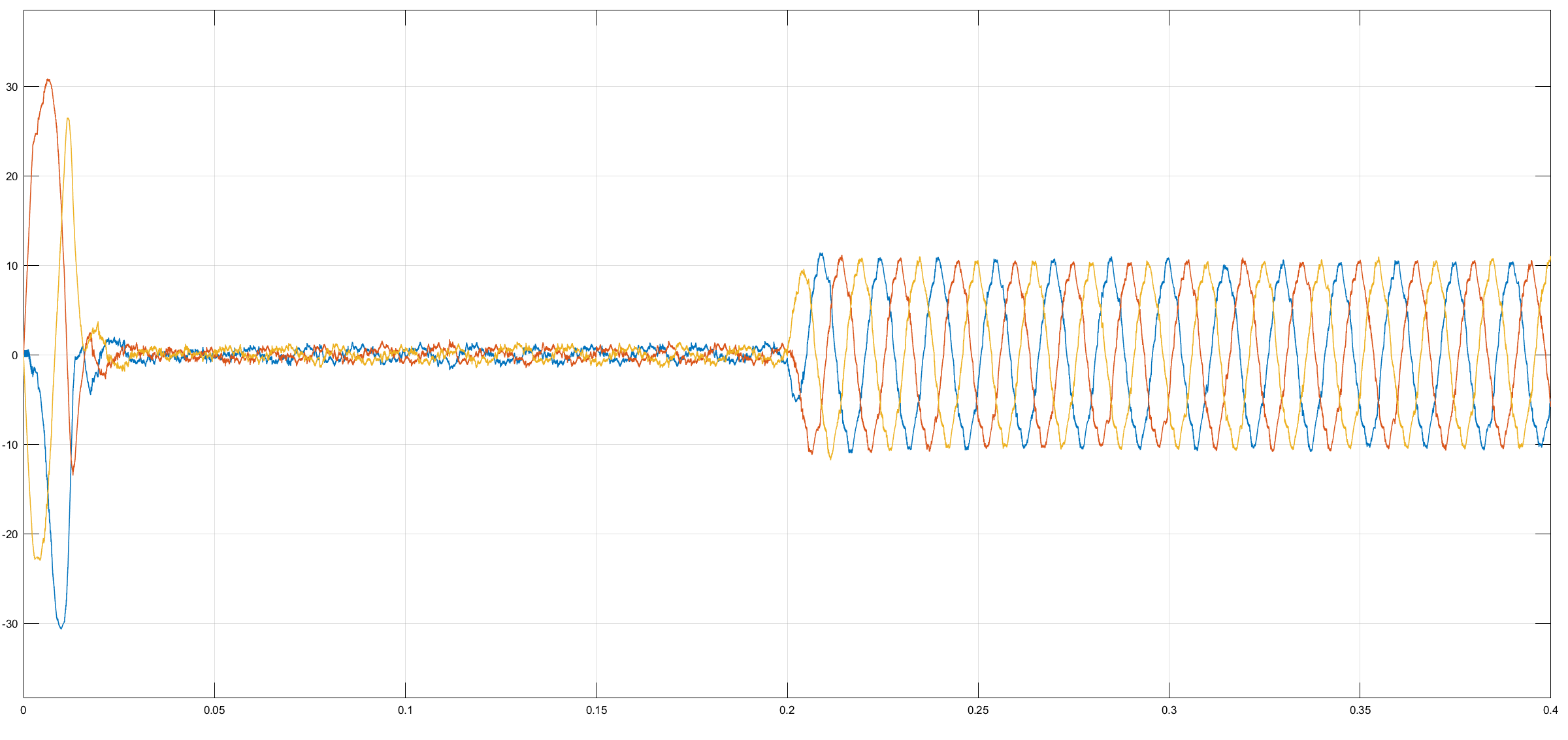
5.4 仿真结果分析 36
5.5 本章小结 39
第6章 总结与展望 40
参考文献 41
致 谢 42
第1章 绪论
1.1研究背景及意义
与感应电机相比较,永磁同步电机没有励磁系统,因为PMSM的定子由永磁材料组成,不需要励磁电流,使得PMSM具有许多优点,在伺服系统等领域被应用广泛。
矢量控制是PMSM常用的控制技术方案,为了实现PMSM的矢量控制,需要获取精准的实时转子位置信息,传统的PMSM转子位置和转速信息一般通过机械传感器来获取 ,但是机械传感器容易受到安装位置、安装环境等因素的制约,并且会增加系统的复杂度和成本,在一定程度上使得系统的稳定性降低。因此,无位置传感器技术便应运而生,无位置传感器控制技术能够改善永磁同步电机驱动系统可靠性,减小系统的体积,降低运行环境要求,并可降低电机驱动系统的成本,具有重要研究意义[1]。
高频注入法是适用于零速或低速运行的有效的矢量控制技术方案,这种方法基于电机的凸极效应,从高频信号激励下的高频响应电流中提取转子位置信息。然而,因为电机在制作工艺上的误差使得实际当中PMSM的电感并非随转子位置呈理想的正弦型分布,电感中包含复杂的高次谐波成分而导致电机呈现为多重凸极,影响转子位置的观测。同时,当PMSM运行在重载状态下时,此时磁路工作在饱和状态下,由于交轴电流产生的交轴 枢反应的存在,导致电机的合成磁场不再跟转子的直轴重合,而是因为磁场畸变发生一定量的偏转,即磁场的轴偏离了机械位置轴,使得交、直轴间具有耦合作用从而影响高频注入法下对转子位置的观测。因此,为了获取更加精确的转子位置信息以实现更加稳定的PMSM矢量控制,对多重凸极效应及交叉耦合效应对转子位置观测的影响进行分析和补偿具有重要的研究意义[2]。
枢反应的存在,导致电机的合成磁场不再跟转子的直轴重合,而是因为磁场畸变发生一定量的偏转,即磁场的轴偏离了机械位置轴,使得交、直轴间具有耦合作用从而影响高频注入法下对转子位置的观测。因此,为了获取更加精确的转子位置信息以实现更加稳定的PMSM矢量控制,对多重凸极效应及交叉耦合效应对转子位置观测的影响进行分析和补偿具有重要的研究意义[2]。
1.2国内外研究现状
永磁同步电机的无位置传感器控制的研究可以分为两类:一类是根据电机的反电动势进行检测,即中高速无位置传感器理论研究,但是在零、低速时该方法因为反电动势过小而导致不能实现自检测;另一类是根据电机的凸极性进行检测,即零速或低速无位置传感器理论研究[3]。下面将对基于高频信号注入法的IPMSM无位置传感器低速控制的国内外研究现状及转子位置观测误差补偿策略研究现状进行分析
1.2.1基于高频信号注入的无位置传感器控制技术研究现状
零速/低速的无位置传感器技术主要基于电机的凸极效应,即利用电机固有的或者是人为造成的不对称性来得到转子位置信息,在零速/低速范围内,高频注入法的应用最为广泛,主要包括高频旋转信号注入法、高频脉振信号注入法、高频方波信号注入法等技术方法。高频注入法按照注入信号的类型又可以分为两类:高频电压注入法和高频电流注入法。因为高频电流注入法对于电流控制器要求具有很高的带宽,所以具体实现起来比较困难,比较常用的是向电机中注入高频电压信号。本小节主要是对高频电压信号注入法进行介绍[1][4]。
早在1993年美国威斯康星大学麦迪逊分校的R.D.Lorenz教授就已经率先提出了高频旋转电压信号注入法。将高频旋转电压信号叠加到两相静止坐标 轴系的控制电压中,利用电机的凸极性效应,在高频信号激励下的高频电流响应中提取相应的高频响应分量,该高频响应分量包含有转子位置信息,利用锁相环观测器观测得到转子位置信息。该方法在该高频响应电流信号的解耦过程当中,需要采用比较多的滤波器,并且需要多次的坐标变换才能获取包含转子位置信息的负序高频电流响应[5]。
轴系的控制电压中,利用电机的凸极性效应,在高频信号激励下的高频电流响应中提取相应的高频响应分量,该高频响应分量包含有转子位置信息,利用锁相环观测器观测得到转子位置信息。该方法在该高频响应电流信号的解耦过程当中,需要采用比较多的滤波器,并且需要多次的坐标变换才能获取包含转子位置信息的负序高频电流响应[5]。
韩国首尔大学的Seung-Ki Sul教授最早提出了高频脉振电压信号注入法,将高频脉振电压信号注入到两相同步旋转坐标轴dq轴系下的d轴当中,注入的高频电压信号会在PMSM的磁路中引起饱和效应,在电机中人为的制造出凸极特性,然后再通过q轴的高频响应电流进行转子的磁极位置观测[4]。
Kim S, Ha J I, Sul S K在文献[6]提出了一种高频方波信号注入的方式,使得高频信号注入的频率可以等于PWM开关频率,由于注入频率的提高,电机的动态控制性能可以得到明显的提升,并且由于注入信号频率的提高,基频信号和高频信号的电流响应分量更容易分离,信号的提取相对比较容易[6]。
1.2.2 转子位置观测误差补偿策略研究现状
由于电机制造方面的非理想因素而引起的多重凸极效应和电机重载运行时由于交直轴间的耦合作用而引起的交叉耦合效应都会对转子位置信息的观测产生影响,造成转子位置观测误差,这将导致频响应电流的不完全解耦,从而影响PMSM的高性能控制,系统稳定性降低。所以,有必要对这些干扰转子位置观测的因素进行抑制并提出补偿策略。
美国的R.D.Lorenz教授在很早的时候就对多重凸极效应进行过研究分析,在文献[7]提出了查表法来补偿多重凸极效应对转子位置观测的影响,利用带通滤波器来获取电流响应的相位和幅值并进行记录,然后利用查表法来对多重凸极进行补偿,但是查表法需要大量的实验数据作为支撑,具有通用性不强等缺点[7]。张国强,王高林,倪荣刚等在文献[8]中提出了基于自适应性神经元滤波器的位置观测器,该方案可以自适应的跟踪和检测谐波的参数,被广泛的应用于自适应滤波、预测等相关领域[8]。
Zine W, Idkhajine L, Kobylanski L在文献[10]中使用查表法来对交叉耦合角进行补偿,但是这个方法需要大量的实验数据或者仿真计算来作为支撑,存在通用性不强的缺点[10]。查表法是从控制算法层面上来补偿交叉耦合角,与查表法相比较,Bianchi N, Fornasiero E, Bolognani S从电机本身设计层面出发,在文献[11]中提出了从根本上抑制交叉耦合效应的方案。通过改善电机的结构来优化电机磁路,从而减弱交叉耦合效应,达到提高PMSM的无传感器运行性能的目的[11]。
1.3论文的主要研究内容
由于永磁同步电机具有诸多优点而被广泛应用于伺服系统等领域。其矢量控制系统需要获取实时的转子位置信息来实现精准的控制,传统的PMSM利用机械式位置传感器来获取转子位置信息,这种方式既会受到安装位置的制约,也会增加安装成本,降低系统可靠性。而PMSM无位置传感器可以完美地避开这些因素所带来的影响,因此,无传感器矢量控制技术成为了热点研究问题。
高频注入法是适用于零速或低速运行的有效的矢量控制技术方案,这种方法基于电机的凸极效应,从高频信号激励下的高频响应电流中提取转子位置信息。然而,因为电机在制作工艺上的误差使得实际当中PMSM的电感并非随转子位置呈理想的正弦型分布,电感中包含复杂的高次谐波成分而导致电机呈现为多重凸极,影响转子位置的观测。同时,当PMSM运行在重载状态下时,此时磁路工作在饱和状态下,由于交轴电流产生的交轴电枢反应的存在,电机的合成磁场不再跟转子的直轴重合,而是因为磁场畸变发生一定量的偏转,即磁场的轴偏离了机械位置轴,使得交、直轴间具有耦合作用从而影响高频注入法下对转子位置的观测。
针对这些问题,在阅读大量国内外相关参考文献,研究对比转子位置误差补偿策略的优劣之后,提出了相应的补偿方案。本文的章节安排如下:
第1章先是介绍了本文的研究背景及意义,然后介绍了高频电压注入法的无位置传感矢量控制的国内外研究现状,最后是对转子位置观测误差的补偿策略的国内外研究现状进行了分析。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: