永磁同步电机矢量控制系统无传感器策略研究毕业论文
2020-02-18 11:06:13
摘 要
针对无位置传感器内置式永磁同步电机(interior permanent magnet synchronous motor,IPMSM)矢量控制系统,通过将滑模观测器和高频电压信号注入法相结合,提出一种可实现在宽调速范围获取准确转子位置信息的混合观测方案。设计基于扩展反电动势模型的滑模观测器,对高频信号注入的滤波器和软件锁相环进行研究,并给出混合观测器 的切换控制方法,以保证切换过程锁相环跟踪的同步性。针对对无传感器IPMSM 系统起动困难的问题,研究了一种初始位置估计方法,先注入高频信号检测磁极位置,再注入脉冲电压矢量来判断极性。最后通过 IPMSM 无位置传感器矢量 控制系统验证了该控制策略的有效性。
关键词:内置式永磁同步电机;无位置传感器;混合观测器;初始位置估计
Abstract
Aiming at the vector control system of sensorless built-in permanent magnet synchronous motor (IPMSM), a hybrid observing scheme is proposed by combining sliding mode observer with high frequency voltage signal injection method, which can obtain accurate rotor position information in a wide speed range. A sliding mode observer based on extended back-EMF model is designed. The filter and software phase-locked loop injected by high frequency signal are studied. The switching control method of hybrid observer is given to ensure the synchronization of phase-locked loop tracking in switching process. Aiming at the difficulty of starting sensorless IPMSM system, an initial position estimation method is studied. First, high frequency signal is injected to detect the magnetic pole position, and then pulse voltage vector is injected to judge the polarity. Finally, the effectiveness of the control strategy is verified by IPMSM sensorless vector control system.
Key word:Built-in permanent magnet synchronous motor; Sensorless; Hybrid observer; Initial position estimation
目录
第1章 绪 论 1
1.1 研究目的和意义 1
1.2 无位置传感器发展概况(国内外研究进展) 1
第2章 IPMSM 无传感器控制方法 4
2.1高频方波电压注入法 4
2.2复合无传感器控制方法存在的问题 6
2.3系统框图 6
第3章 IPMSM 转子初始位置估计 11
3.1 IPMSM 数学模型的建立 11
3.2 IPMSM 转子初始位置估计 12
3.3滑模观测器设计 14
3.4 高频信号注入观测器设计 16
3.4 混合观测器切换控制策略 16
第4章 基高频旋转电压注入法与MRAS法结合 19
4.1 MRAS 的基本原理 19
4.2 IPMSM中速和高速区无位置传感器控制 19
4.3 IPMSM 无位置传感器复合控制 21
第5章 总结与展望 23
5.1 总结 23
5.2展望 24
参考文献 26
致 谢 27
第1章 绪 论
- 研究目的和意义
- 研究目的
- 研究目的和意义
针对无位置传感器内置式永磁同步电机(interior permanent magnet synchronous machine,IPMSM)全速域运行,传统的基于转速或位置信息融合的复合控制方法运算复杂度高、实现较为困难的缺点,设计出一种基于标幺化位置误差信息融合的单 Luenberger 位置观测器复合控制方法。低速(零速)域和中高速域分别采用方波电压注入法和反电动势模型法获得标幺化位置误差信号;过渡区域通过速度信息对标幺化位置误差信号进行融合,采用单 Luenberger位置观测器实现转子位置、转速实时观测,实现 IPMSM 无位置传感器控制全速域运行。在基于高频注入的内置式永磁同步电机(interior permanent magnet synchronous motor,IPMSM)无位置传感器低速控制场合,需要使用滤波器提取位置信息和反馈电流环基频分量,但滤波器会导致信号延迟、减小电流环带宽。同时,为提高观测位置的精度,必须对逆变器电压误差进行补偿,由于数字控制系统有一个开关周期的延迟,采用先计算后补偿的方式复杂且准确度不高。针对以上两个问题,该文提出一种基于标幺化位置误差信息融合的单 Luenberger 位置观测器复合控制方法。
永磁同步电动机(PMSM),主要是由转子、端盖及定子等各部件组成,由于 PMSM 具有体积小、转动惯量比大等优点,以至于在工业生产中被广泛应用。在 PMSM 控制系统研究中,获取精确的电机转子位置和转速信息是整个系统的前提,传统的电机控制系统通常采用机械传感器完成。但是,使用机械传感器不仅增加了成本,同时安装机械传感器会增大 PMSM 的空间体积,给 PMSM 进一步推广带来许多麻烦。现阶段,针对 PMSM 控制的研究已成为一大热点。
1.2 无位置传感器发展概况(国内外研究进展)
目前,已经有多种内置永磁同步电机无位置传感器低速控制的策略被相继提出,1984年,英国剑桥大学提出应用SRM(Synchronous Reluctance Motor)的电流波形检测法是最早的电机无传感器转子位置检测方案。其基本思想是: SRM的电流变化率取决于电感增量,而电感增量又是由转子位置决定的,利用这一规律可解算出转子的位置信息。早期的永磁同步电动机无传感器技术研究开始于1989年[1,在90年代初得到了发展。这些早期的无位置传感器方法可统称为波形检测法,通过检测物理量波形,找到反映特殊位置的特征点,用以辨识位置。这些物理量可以是电机的电压、电流、磁链和反电势等。近十几年来,国内外学者在消除位置或速度传感器方面做了大量的研究工作,提出了很多方法。国外许多研究机构和大学对于永磁同步电机的无传感器控制技术进行了很深人地研究。如美国Wisconsin大学的R. D. Lorenz教授及其研究团队,一直着力于永磁同步电机无传感器控制方法的研究。他们于1993年最早提出采用高频信号注人的方法进行永磁同步电机的无传感器控制,取得了许多积极的研究成果,发表了多篇学术论文,同时还申请了多项专利”。韩国汉城国立大学的Seung -ki Sul教授自1995年就开始发表无传感器控制技术方面的研究论文。他们在多种电机型式及多种控制策略和方法上有所尝试。德国Wuppertal大学的Joachim Holtz 教授及其研究所也在从事永磁同步电机的无传感器研究,其研究也主要集中在高频信号注人法方面。目前他们已发表了多篇相关的研究论文4)。澳大利亚南威尔士大学的M. F. Rahman教授等、意大利Alfio Consoli, AntonioTesta等人也对电机的无传感器控制进行了研究。
国内浙江大学的贺益康教授及其研究生在这方面进行了较深入地研究并获得了国家自然科学基金的资助。其研究主要集中在基于凸极效应的高频信号注人法方面,已获得了较好的实验结果。该方法优点是调速范围宽,系统鲁棒性较强。但是该方法需要电机具有一-定的凸极性,即只能用在内埋式永磁电机或经过特殊结构设计的表贴式永磁同步电机上,同时由于高频信号的注人会带来高频噪声,所以转子位置的估算精度不高,目前最大误差为土14.7°电角度。清华大学的研究主要集中在转子初始位置的估算上。他们采用试探性施加电压脉冲,通过检测比较相应的电流值的方法来判断转子位置。该方法利用了定子铁心的磁饱和特性,即使在凸极性很小的表贴式PMSM上也可以应用,其估算效果较好,但估算过程较繁琐,实时性较差,同时所施加的电压脉冲的幅值和作用时间不好选择”。天津大学把滑模变结构观测器和推广卡尔曼滤波算法用于永磁同步电机的无传感器控制中,其估算精度及收敛性较好,抗负载扰动性较强,但目前他们的研究仍停留在仿真阶段,还没有获得实验结果。沈阳工业大学在改善PMSM的低速下位置估算精度方面取得了一-定的进展,其低速和零速位置估算精度较高并且鲁棒性较强,但其研究也还停留在仿真阶段。其它如_上海大学、上海交通大学及西安交通大学等高校也对无传感器控制进行了相关研究,并发表了相关论文也已经将无传感器控制的永磁同步电机系统用在了家用电器上,但目前只适用于位置开环、稳速精度要求不高的应用场合。
华中科技大学也在无传感器永磁同步电机控制方面开展了一些研究工作;针对磁钢表面安装式永磁同步电机(无凸极性)研究了一种初始位置估计的方法。因该电机直轴和交轴电感近似相等,相对于内埋式电机,要准确可靠地估计其初始转子位置,难度更高。
第2章 IPMSM 无传感器控制方法
2.1高频方波电压注入法
 图2-1
图2-1
在如图2-1所示的坐标系统中IPMSM 在 d-q轴系下数学模型为
 (2-1)
(2-1)
式中,ud, uq, id, iq 为 IPMSM d-q 轴系下电压、电流 分量,R 为定子电阻,Ld, Lq 为 d-q 轴电感,λf为永 磁体磁链,ωe为电角速度,p 表示微分算子。
由于注入高频电压信号频率远大于基波运行 频率,因此忽略定子电阻压降和反电动势影响, IPMSM 在高频信号激励下可等效为感性负载:
 (2-2)
(2-2)
式中 表示 d-q 轴系下高频电压、电流分量,下标h表示高频量,上标 r 表示转子轴系。因为方波注入频率较传统正弦注入频率高,可以简化载波分离难度并提高系统带宽。在观测的转子 d 轴注入对称方波电压信号:
表示 d-q 轴系下高频电压、电流分量,下标h表示高频量,上标 r 表示转子轴系。因为方波注入频率较传统正弦注入频率高,可以简化载波分离难度并提高系统带宽。在观测的转子 d 轴注入对称方波电压信号:
 (2-3)
(2-3)
式中:iαh, iβh表示α-β轴系下高频响应电流; 为转子位置及观测值,因此,可得静止α-β轴系下高频响应电流包络信息
为转子位置及观测值,因此,可得静止α-β轴系下高频响应电流包络信息
 (2-4)
(2-4)
式中:Iαh, Iβh 表示静止α-β轴系下高频响应电流包 络;ωh 表示注入方波电压信号频率Lavg=(Ld Lq)/2 表示均值电感;Ldif=(Ld−Lq)/2 表示差值电感。 可见,Iαh, Iβh 中包含转子位置信息,但前提是 Ld≠Lq,即电机存在凸极效应。
当位置观测器收敛,即Δθeh=0,可得
 (2-5)
(2-5)
通过包络检测器提取 Iαβh, Iβh 后,作标幺化处理 式(7),采用矢量叉乘方法解耦位置误差信息Δθeh, 其原理图如图 2所示。标幺化处理能够避免位置误差信息受电感参数变化的影响。通过 Luenberger 位 观测器实现对转子位置实时观测,其原理图如图所示。
 图2-2 Luenberger位置观测器
图2-2 Luenberger位置观测器
2.2复合无传感器控制方法存在的问题
根据无传感器PMSM转子位置自检测方法在不同速度区间的估算结果,分为中高速的方法以及0速或者极低速的方法。
应用于中高速的方法,这类方法依赖电动机基波激励模型中与转速有关的量进行转子位置和速度估算,由于电动机运行在0或极低速时,有用信号的信噪比很低,难以提取。第二类方法能够实现全速检测,基本原理是检测电机的凸极,由于凸极中有位置信息,因此可以通过不同的励磁方法和不同的信号检测和分离方法,将位置估算出来。
还有磁链估计法,优点是计算量小,简易实现,但在低速时精度下降。纵观很多方法,虽然各有有点,却没有摆脱对电机的依赖性。
2.3系统框图
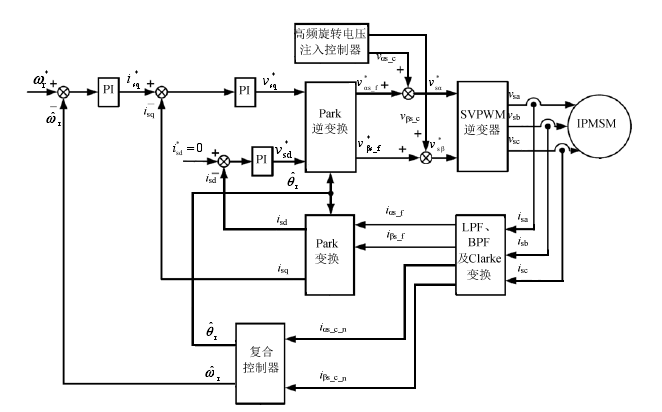
 图 2-3 主电路系统框图
图 2-3 主电路系统框图
图2-3中,基于MARS的高次谐波解耦器中输入为转子位置误差 和观测的转子位置角
和观测的转子位置角 以及观测的转子电角速度We,输出为正交信号中的高次谐波分量.
以及观测的转子电角速度We,输出为正交信号中的高次谐波分量.
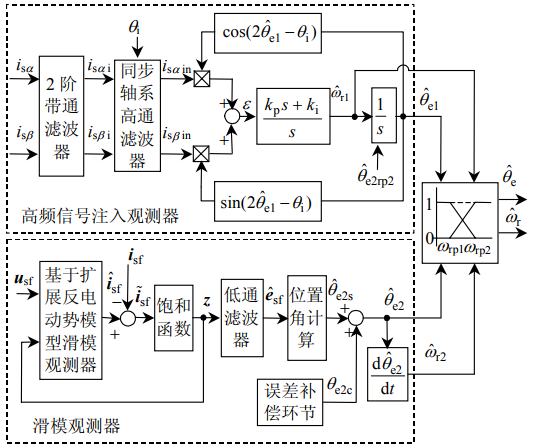
 图2-4 位置观测器
图2-4 位置观测器
将模型误差与以6倍电角度旋转的单位矢量相乘,乘积经过PI控制器的处理,PI输出结果会自动收敛到E jF,取E jF的共扼向量与4倍电角度旋转的矢量相乘,得到正交信号中的高次谐波分量,从而抑制4次电感谐波电流对转子位置观测的影响。
由于4次电感谐波的存在,转子位置对应的正交信号为  (2-6)
(2-6)
其中
 (2-7)
(2-7)
输出的高次谐波分量
 (2-8)
(2-8)
式中
B²=E² F²,tanφ4=F/E,
E=
转子位置对应的正交信号
Inum=
Iden= (2-9)
(2-9)
经过积化和差运算后得到的位置误差信号
 (2-10)
(2-10)
当 足够小时,可简化为
足够小时,可简化为

 (2-11)
(2-11)
当PI控制器将位置误差信号控制到0时,输出转子电角速度观测值 ,积分后得到转子观测值
,积分后得到转子观测值
如图 2-5 所示为基于模型法的PMSM 无位置传感器控制原理框图。
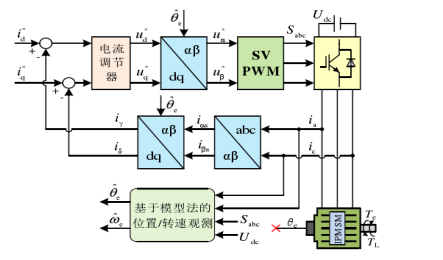 图2-5 基于模型法的无位置传感器控制原理框图
图2-5 基于模型法的无位置传感器控制原理框图
通常情况下,基于模型法的位置/转速观测可分为三部分,即反电动势或磁链信息观测、位置误差信号解耦和位置/转速跟踪器。根据反电动势或磁链信息观测方法的不同,较常见的模型法包括模型参考自适应法、扩展卡尔曼滤波器法、磁链观测器法、状态观测器法以及滑模观测器法等。
滑模观测器方法通过变结构控制实现位置误差信号收敛,对参数变化具有较强的鲁棒性;状态观测器法,由于反馈增益矩阵结构的多样性,通过对其合理设计,能够实现对多种复杂工况的适应性。通过对比并测试几种不同模型法后发现,稳态情况下位置误差信号具有统一形式,且d轴电压扰动和 q 轴电感不确定性是位置观测误差的主要来源。在获取反电动势或磁链信息后,通过代数运算或三角函数运算就可以解耦出位置误差信号,比例分(PI)跟踪器和 Luenberger 观测器是用于跟踪最终位置/转速信息的两种主要途径。
然而在低速区,由于永磁同步电机反电势信噪比严重降低,加之逆变器非线性和建模不确定性的影响,基于反电动势模型法的无位置传感器控制技术此时难以获得较好的位置观测效果。因此,各国学者提出利用永磁同步电机磁阻分布的各向异性,通过注入高频信号的方法辨识转子位置。如图2-6 所示为高频信号注入法原理框图。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:


![]C6(}R%T`SYTF_O6P}1PXVC](http://www.biyelunwen.org/wp-content/uploads/2020/02/lw8609_20202181161120.png)