直流无刷电机控制系统的建模与仿真毕业论文
2020-02-18 11:08:35
摘 要
自直流无刷电机面世以来,它就一直以多种优点为人们所称道,如体积小、重量轻、效率高、惯量小、控制灵敏度高和可在如高海拔高空、空气稀薄等恶劣条件下正常工作等。随着时代的推移,人们对直流无刷电机的研究从电机本体逐步扩展到控制系统,同时计算机的发展,也为我们提供了各种平台来模拟仿真直流无刷电机的本体以及其控制系统。在这些平台的帮助下,我们总可以设计出更加简便、控制算法和策略更加优越的控制系统,并以此验证各种控制系统的性能,并按设计要求分析了方波直流无刷电机的运行模式。不仅如此,由于是在虚拟平台进行仿真,不需要制造电机实体,也可以用鼠标轻轻点击,便可以改变负载、加入扰动因子,我们可以节省一大笔的人力财力和时间成本,对研究有极大意义。只是仿真结果距离实际电机情况的远近因人而异,而且往往是近乎理想化的,因此我们更需要探索出更有实际意义的模型,才可以真正地投入实际应用。
本文介绍了直流无刷电机的发展历程、基本结构以及工作原理,详细分析了直流无刷电机的数学模型,为了能够方便高效地理论分析和验证各种算法和策略,在此基础上在MATLAB/SIMULINK环境下建立了直流无刷电机控制系统仿真模型,对控制系统的各个子模块进行了详细的介绍分析,最后通过得到电机的各项参数如电流、反电动势、转速 、转矩等仿真波形并加以分析,评估了本设计建模方式的优劣,并指出了本建模方式的实际意义。
对该系统采用了当下适用性较广且可靠性高的双闭环控制。仿真模型建立完成后,通过对该系统的仿真得到并分析了电机的相电流、反电动势、转速、输出电磁转矩等参数,且仿真结果与理论相一致,验证了该建模方法的正确性和有效性。
关键词:直流无刷电机;建模;仿真;电流滞环;Matlab
Abstract
Since the invention of the brushless dc motor, it has been praised for its many advantages, such as small size, light weight, high efficiency, small inertia, high control sensitivity and can work in bad conditions such as high altitude, thin air and so on.With the development of The Times, people's research on brushless dc motor gradually expands from motor body to control system. At the same time, the development of computer also provides us with various platforms to simulate the brushless dc motor body and its control system.With the help of these platforms, we can always design a more convenient control system with better control algorithm and strategy, verify the performance of various control systems, and analyze the operation mode of square wave brushless dc motor according to the design requirements.Not only that, because the simulation is carried out on a virtual platform, motor entity is not required to be manufactured, and the load can be changed and disturbance factors can be added with a click of the mouse. We can save a large amount of manpower, financial resources and time costs, which is of great significance for the research.However, the distance between the simulation results and the actual motor situation varies from person to person, and is almost ideal. Therefore, we need to explore a more meaningful model, so that we can really put it into practical application.
This paper introduces the development of brushless dc motor, basic structure and working principle of a detailed analysis of the mathematical model of brushless dc motor, in order to be convenient and efficient to theoretical analysis and validation of various algorithms and strategies, on the basis of the established in MATLAB/SIMULINK environment simulation model of brushless dc motor control system for the control system of each module are analyzed in detail, finally get the motor through the various parameters such as current, counter electromotive force, rotational speed, torque, etc. The simulation waveform and analysed, assessed the advantages and disadvantages of this design modeling way,The practical significance of this modeling method is pointed out.
A double closed loop control with wide applicability and high reliability is applied to the system.After the establishment of the simulation model, the parameters of the motor, such as phase current, counter electromotive force, speed and output electromagnetic torque, were obtained and analyzed through the simulation of the system. The simulation results were consistent with the theory, which verified the correctness and effectiveness of the modeling method.
Keywords: brushless DC motor; modeling; simulation; current hysteresis; Matlab
目录
第一章 绪论 1
1.1 引言 1
1.2直流无刷电机概述 2
1.2.1 直流无刷电机的诞生及发展 2
1.2.2直流无刷电机的缺点 3
1.2.3直流无刷电机的研究热点 3
1.3 国内外研究现状分析 4
1.3.1国外研究现状分析 4
1.3.2国内研究现状分析 5
第二章 直流无刷电机的工作原理及数学模型 6
2.1 直流无刷电机的结构与工作原理 6
2.1.1 直流无刷电机的结构 6
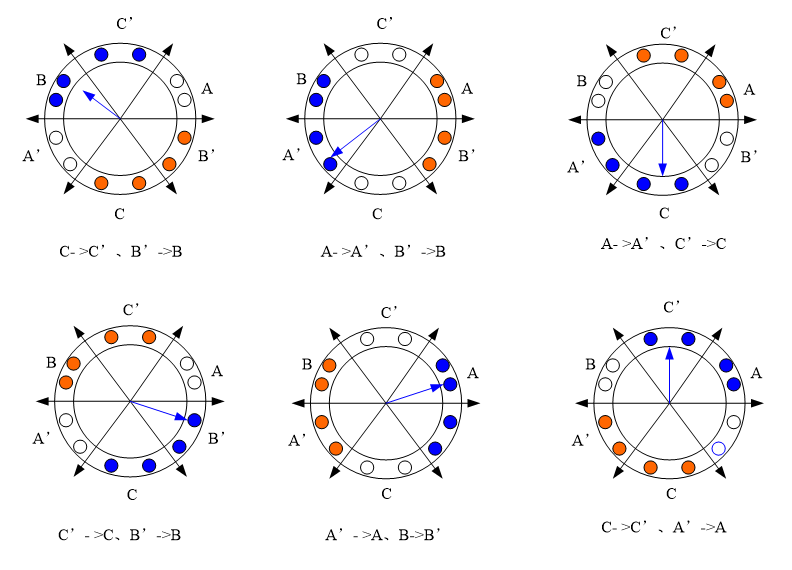
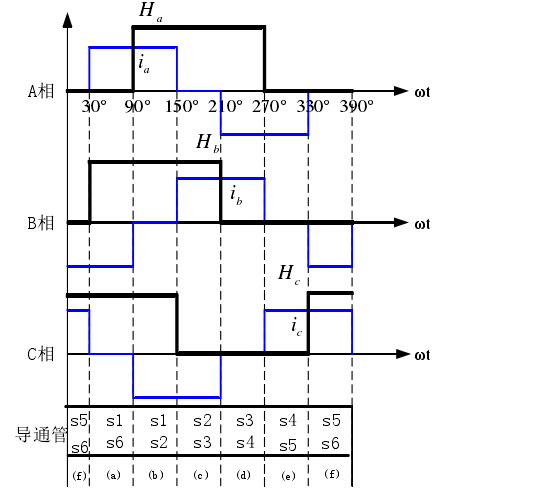
2.1.2 直流无刷电机的工作原理 7
2.2 直流无刷电机数学模型 10
2.2.1 电压方程 10
2.2.2 电磁转矩方程 11
2.2.3 运动学方程 11
2.3 直流无刷电机特性分析 12
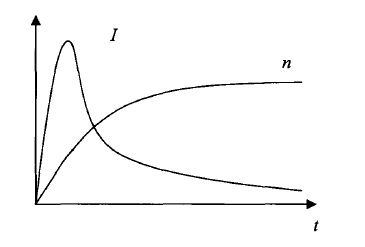
2.3.1 启动特性分析 12
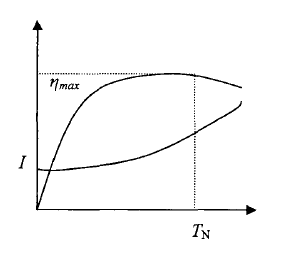
2.3.2 工作特性 12
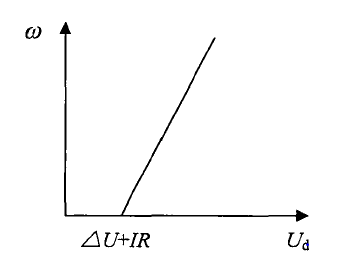
2.3.3 调节特性 13
2.3.4 机械特性 14
2.4 直流无刷电机控制技术 14
2.4.1 矢量控制 15
2.4.2 直接转矩控制 15
2.5 本章小结 16
第三章 直流无刷电机控制系统的建模 17
3.1 直流无刷电机仿真系统模型设计 17
3.2 电机本体的建模 17
3.2.1 电压方程模块 18
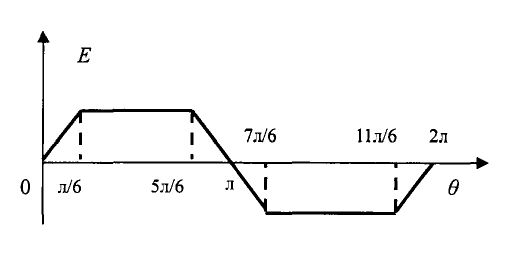
3.2.2 反电动势模块 19
3.2.3 转矩计算模块 21
3.3 电机控制系统建模 22
3.3.1 双闭环控制系统 23
3.3.2 参考电流模块 26
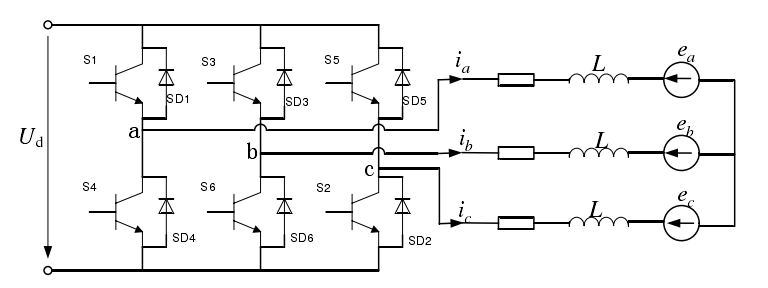
3.3.3 电压逆变器模块 27
第四章 直流无刷电机控制系统的仿真 29
4.1 模型参数设定 29
4.2 仿真环境设定 29
4.3 仿真结果及分析 29
4.3.1 各相电流仿真结果及分析 29
4.3.2 反电动势仿真结果及分析 30
4.3.3 转速仿真结果及分析 31
4.3.4 转矩仿真结果及分析 32
第五章 结论 33
参考文献 34
致谢 36
第一章 绪论
引言
自90年代面世以来,直流无刷电机就一直因多项优点为人们所称道:如体积小、重量轻、效率高、惯量小、控制灵敏度高和可在如高海拔高空、空气稀薄等恶劣条件下正常工作等。直流无刷电机,其核心就是“无刷”二字。直流无刷电机与直流有刷电机的根本区别就是换向的方式,直流无刷电机采用的电子换向方式大大减轻了换向过程中产生的能量损失、机械磨损等负作用,同时不失一般有刷直流电动机的优秀性能,广泛应用在各种随动系统要求能承载大功率负荷、精度灵敏度高、稳定性强、的高自动化水平领域中。
直流有刷电机的性能并不输给直流无刷电机,但为什么都愿意采用直流无刷电机呢?这是由于直流无刷电机不像直流有刷电机那样依靠电刷这一物理器件与换向器直接接触来进行换向,直流无刷电机往往没有换向器和电刷组成的物理结构。因而,直流无刷电机、损耗小、安全性高、控制性强、运行可靠、维护方便。直流无刷电机继承了直流有刷电机操作简单、结构简单、维护方便等优点,同时具有较高的机械效率、励磁损耗远远低于其他电机且调速技术水平高,易于调速。直流无刷电机另一个最大的卖点是节能,这种电机的效率往往能达到百分之七十以上,更大型的更是能接近百分之一百的效率,这是其他电机无法做到的。放眼看去,当今地球能源消耗有相当大一部分集中在各种场合中的各类电机上,随着21世纪以来人们环保意识的增强、可持续发展战略的全球认可度上升以及电力电子技术技术、数字电子技术的高速发展,直流无刷电机势不可当。
在国际上,直流无刷电机已经得到了大部分用户的认可且大面积应用在各个领域。比如,发达国家日本,在涉及到百姓日常生活的民用方面,其国内有95%以上的空调采用的是永磁直流无刷电机,而发达国家美国则是将直流无刷电机更多地应用在了军事和航天领域,且达到了相当成熟的程度。由于直流无刷电机在各个方面上所展现出来的优越性,世界各国都在加大对直流无刷电机的研发力度,以期占领更多的市场份额,在未来的电机市场中,可以说是得直流无刷电机者得天下。
再看国内,由于我国直流无刷电机在二十世纪末才开始发展,虽然近些年来在这方面的技术突飞猛进、发展迅速,但与国际上发达国家相比仍有一定的差距,综合水平距国际水平仍有一段距离。但值得庆幸的是,我国是稀土资源贮藏大国,稀土资源足足占世界稀土总储量得四分之三以上,因此我们有足够的时间与资源去发展直流无刷电机。
1.2直流无刷电机概述
1.2.1 直流无刷电机的诞生及发展
直流电动机是历史最悠久的电机,核心构成部分是定子上的励磁绕组和转子上的电枢绕组,换向由电刷完成。正是由于电刷的存才,才导致直流有刷电机逐渐没落。电刷是一个物理器件,长期使用必然会造成磨损,而磨损就意味着维修甚至更换,这对于一个需要长期运作的机器来说是很致命的,不仅增加了工作成本,还浪费了时间。另外由于电刷不得不依靠换向器使用,而换向器的使用不仅增加了电机的制造成本、缩减了电机的使用寿命,最致命的是它限制了转子转动惯量这一在后期必然是攻坚难点的参数的优化,转子转动惯量始终无法达到理想的低值,进而影响了动态特性;其次是在电机的长期运作中,总会有各种杂质灰尘落入机器中,而电刷作为极为活跃的一个部件首当其冲,许多这种东西就积累在电刷上,导致电刷工作不稳定,进一步导致电机工作不稳定,这意味着这种电机不能工作在一些要求高精度、高稳定性的环境中。随着电力电子技术的长足进步,在精益求精的工匠精神以及大时代的需求之下,直流无刷电机应运而生。直流无刷电机在具有直流有刷电机的优良表现的前提下,同时具备许多其他电机所没有的优良调速性能,其中包括:较宽的调速范围、较高的工作效率较好的低速特性以及较大的启动转矩特性 。
。
实际上直流无刷电机的发展只经历了短短数十年,但在这短短的几十年里,直流无刷电机发展飞快并且广泛应用在各种领域之中。1917年,Boliger提出了用整流管代替直流有刷电机的机械电刷的想法,这就是直流无刷电机的基本构想。1955年,美国的D.Harrison等人在前人的启发下,创造性地提出了使用晶体管来代替换向器换向,并以此申请了专利,这就形成了后来影响世界的直流无刷电机的原始雏形。由于该创造性的产品并没有启动转矩,该产品的应用仅仅是停留在实验室研究的水平,无法真正有效地投入工业应用当中。直到1962年,传感器技术取得了重大突破,涌现了多种性能优秀的传感器,其中磁敏传感器的杰出代表霍尔传感器就被应用到了直流无刷电机中。用霍尔位置传感器来代替机械换向并实现电子换向功能的直流无刷电机的突破性诞生,标志着直流无刷电机终于能够实际投入工业应用,是直流无刷电机发展史上具有重大意义的一次升级。1964年,直流无刷电机被首次应用在航空领域中。1978年在汉诺威贸易展会上科学家们首次展示了可人为控制的带有控制系统的直流无刷电机,大获好评,标志着直流无刷电机正式投入民间工业应用 。
。
半个世纪以来,直流无刷电机并没有止步不前,而是随着新材料、新技术和新控制策略的出现而不断优化自身。其中,直流无刷电机的一次大发展出现在1980年初,改进高性能磁材料的发明。随着电力电子技术的快速发展,器件功率越来越大,开关速度越来越快,大功率晶体管(GTR)、场效应管(MOSFET)、绝缘栅双极型晶体管(IGBT)等新型开关器件的出现彻底颠覆了电机驱动器先前的设计,在减小驱动器的重量和体积、提高运行可靠性的同时,增大了直流无刷电机的调速范围和功率,使得直流无刷电机将其他电机远远甩在后头。在控制技术方面,直流无刷电机大大受益于电子技术的发展特别是电力电子技术的发展,同时伴随着各种高性能微处理器的出现以及它们在控制器中的应用,控制器因此变得更加受人的意志所控制,使直流无刷电机的换相功能可以更加的可靠、稳定。从各方面来看,直流无刷电机一直随着相关领域的发展而不断进化,可以说是搭上了时代的顺风车,在民用、军用以及工业应用上得到了越来越广泛的应用,直流无刷电机很大程度上取代了直流有刷电机,基本称霸了21世纪的电机市场。
1.2.2直流无刷电机的缺点
本着客观辩证看待事物的态度,我在了解了直流无刷电机的优点之外,也研究了直流无刷电机的缺点。与一般直流有刷电机和感应电机相比,直流无刷电机的缺点主要有以下几点:
- 技术含量高。直流无刷电机的正常工作离不开控制器这一高技术含量的精密电子器件,因此电机对技术的要求变高以及成本的上升无法避免。
- 结构复杂、造价相对高。位置传感器价格不低,电机造价因此提升;此外,通过位置传感器换向的方式的可靠性实际上相对于固定的电刷机械换向要低一点。但随着科技的进步,霍尔位置传感器的分辨率可以调整,一般来说成本会随着分辨率的下降而下降。寻找一个合适的分辨率,也是一个研究方向。
- 散热要求高。转子永磁材料在高温场景下难以发挥性能,需要散热。
- 换相时产生的难以避免的转矩脉动,限制了直流无刷电机在高精度要求系统中的应用。这也是直流无刷电机最大的缺点。
综上所述,直流无刷电机也是存有一些缺点的,但其有明显的性能优势,随着科技的进步,曾经造价高昂的半导体器件和永磁体材料的成本已经明显下降,因此直流无刷电机的成本也大大降低。
1.2.3直流无刷电机的研究热点
目前,对直流无刷电机的研究聚焦于以下几点 :
:
1)数字化,智能化,网络化。所谓智能化,是在数字化的基础上,将微处理器加入到电路中代替原先的一些复杂大型器件,电路得以简化且效率更高,控制系统可以采用更复杂多样的算法以得到最佳的控制效果。最后是网络化,通过在控制单元与其他控制设备之间建立联系,形成网络,使得控制系统的操作更加简便高效。
2)控制策略的优化。矢量控制、直接控制等控制策略都可以达到抑制电机转矩脉动,提高伺服精度,扩大应用范围的目的。不同控制策略中参数的选取及优化影响着其效果。
3)控制系统的优化。一个电机系统是由其电机本体及控制器组成的,因此控制系统的优化从两方面出发:一方面是改良电机的本体,增大容量、减少功耗、提高响应速度等;另一方面是改良电机控制器,研究高性能的无位置传感器控制技术。
4)转矩脉动的抑制。上一节中提到了转矩脉动是直流无刷电机的主要缺点之一,因此想要提高直流无刷电机的效率,抑制转矩脉动则是关键所在。实际上转矩脉动是直流无刷电机的结构所导致的,比如齿槽效应、换相时产生的转矩脉动等。现通常采用斜槽或分槽数的工艺来抑制齿槽脉动,能良好地抑制齿槽效应产生的脉动。换相转矩脉动主要是由于换相期间电流的变化引起的,国内外的学者对如何控制换相期间电流产生的变化各有见解,如换相重叠法、利用直接转矩方法对直流无刷电机进行控制、利用转矩观测器间接测量的方法等。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: