铁路转辙机控制系统设计毕业论文
2020-02-18 11:08:41
摘 要
论文主要研究设计了无刷直流电动机为驱动电机的铁路转辙机控制系统,在目前的铁路转辙机控制系统中驱动电机大多为有刷直流电机,在将两种电机进行性能上的分析和比较后,决定采用无刷直流电机对有刷直流电机进行替换,并以此为基础设计控制系统。
首先,论文对无刷直流电动机结构及工作原理进行较为详细的研究;其次,在掌握无刷直流电动机相关原理的基础上,给出控制系统整体方案;最后,根据所分析的总体方案,进行控制系统软、硬件设计。
本次设计的重点工作是控制系统软、硬件设计。所设计的无刷直流电动机控制系统不仅适用于铁路转辙机,还可运用于其他驱动设备,因此具有广泛的应用前景。
关键词:铁路转辙机、无刷直流电动机、控制系统、软硬件设计
ABSTRACT
This dissertaition mainly studies and designs the control system of railway switch machine driven by brushless DC motor. At present, most of the drive motors in the control system of railway switch machines are DC motors, after analyzing and comparing the performance of the two motors, this dissertaition decides to use brushless DC motor to replace DC motor,and the control system is designed. on this basis.
Firstly, the structure and working principle of BLDCM are studied in detail in this paper. Secondly, on the basis of mastering the relevant principles of BLDCM, the overall scheme of the control system is given. Finally, according to the overall scheme analyzed, the software and hardware design of the control system is given.
The emphasis of this design is the software and hardware design of the control system. The brushless DC motor control system designed is not only suitable for railway switch machine, but also for other driving equipment, so it has a wide application prospect.
Keywords: railway switch machine,brushless DC motor,control system,Software and Hardware Design
目录
摘要 I
ABSTRACT II
第1章 绪论 1
1.1引言 1
1.2课题背景及意义 1
1.3国内外研究现状 2
1.4主要研究内容 2
第2章 无刷直流电动机工作原理 4
2.1无刷直流电动机结构及原理分析 4
2.2无刷直流电动机与有刷电机的区别 11
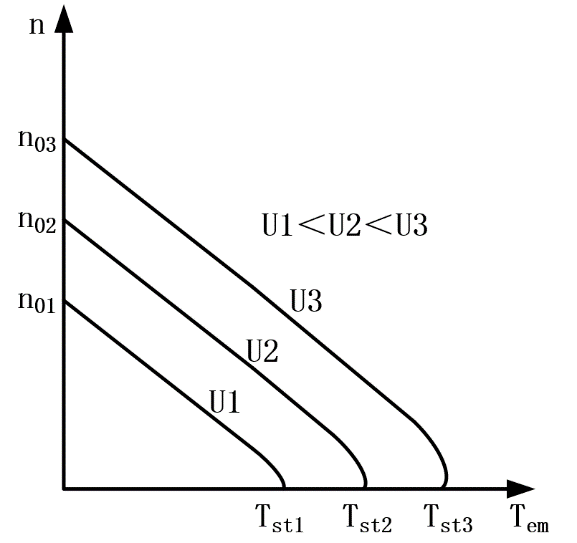
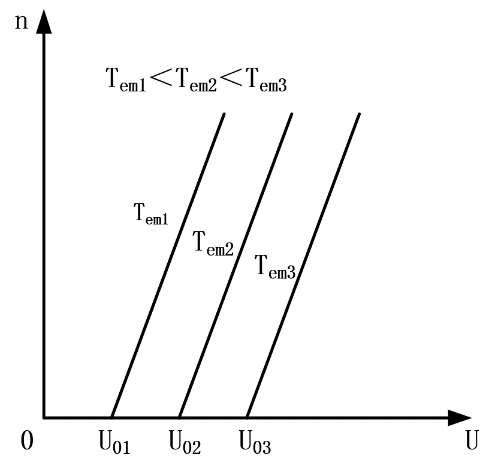
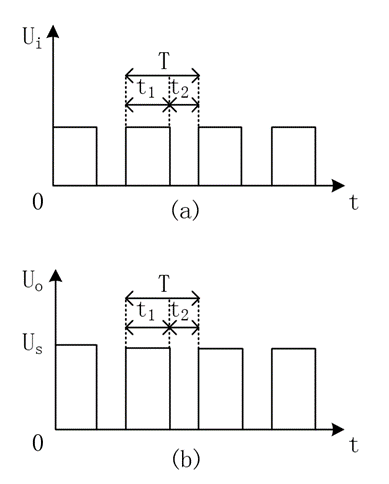
2.3无刷直流电动机调速原理 12
2.4无刷直流电动机控制方法 14
2.5本章小结 15
第3章 转辙机控制系统总体方案分析 16
3.1铁路转辙机驱动电机概述 16
3.2设计要求及指标 16
3.3控制系统总体方案分析 17
3.4电机本体方案分析 18
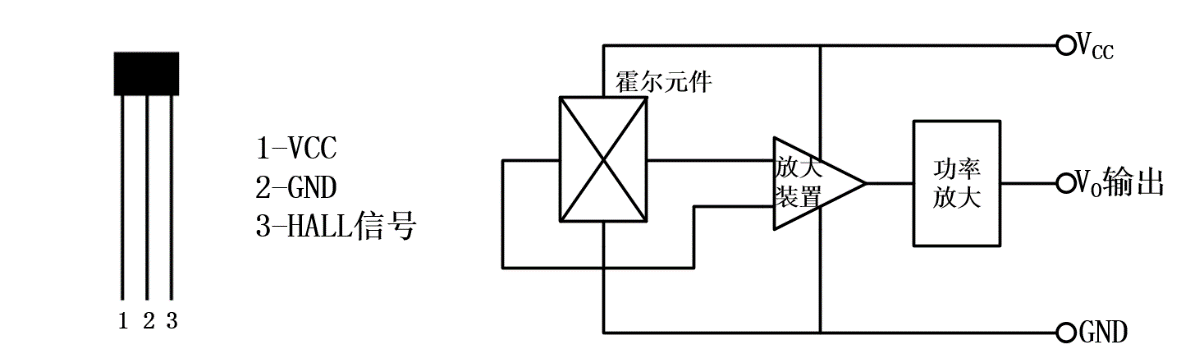
3.5转子位置传感器方案分析 19
3.6辅助电源方案分析 20
3.7本章小结 21
第4章 转辙机控制系统设计 22
4.1辅助电源设计 22
4.2主功率逆变电路设计 25
4.3驱动及保护电路设计 26
4.4正/反转识别电路设计 29
4.5 PWM波生成电路设计 30
4.6 逻辑综合电路设计 31
4.7基于GAL16V8的软件设计 32
4.8防雷设计 33
4.8本章小结 34
第5章 总结与展望 36
5.1论文总结 36
5.2论文工作的展望 36
参考文献 37
附录A 38
附录B 39
附录C 40
致谢 41
第1章 绪论
1.1引言
无刷直流电机以电子换向器取代传统直流电机的机械电刷,因而也被称为无换向器直流电动机。由于无刷直流电动机具有构造简单、寿命长、效率高、维护便捷等优点迅速在家用电器、汽车、工业自动化等领域得到长足的发展。在铁路信号设备领域中,无刷直流电机同样可以发挥其优势,其中能够应用到的并且较为典型的铁路信号设备就是铁路转辙机。
在目前应用较为广泛的铁路转辙机型号中,其驱动电机大多为传统的有刷直流电机,若把无刷直流电动机将其进行取代,将可以预见到无刷直流电动机在铁路信号设备领域中广阔的应用前景[1]。
论文从无刷直流电动机运行原理及控制方法入手,给出了无刷直流电动机作为铁路转辙机驱动电机的控制系统总体方案,然后针对总体方案进行配套的软、硬件设计,从而实现本次课题的目标。
1.2课题背景及意义
根据相关资料的记载,我国第一条铁路是由英国所修建,由上海闸北向北通到吴淞口的淞沪铁路。从1876年淞沪铁路修建完工至今,铁路在我国已经存在并发展了100多年的历史,并且铁路运输对我国国民经济的发展起到了相当关键的作用。现如今我国的铁路运输正朝着信息化、高速化的方向发展,铁路对人们生活出行影响将会越来越深远。
铁路转辙机作为一种极为重要的铁路信号设备,它的可靠与否将对火车的运输效率及行车安全产生影响。铁路转辙机主要有电液式、电空式及电动式三种类型,电动式是目前应用较为广泛的类型。电动式转辙机的动力源为电动机,它根据控制信号的指令以及变速器的变速后,电动机将驱使铁轨改变开通方向,直至轨尖贴合基本轨并将其锁闭。电动式转辙机能对铁轨进行状态转换及闭锁外,还具备对轨道位置进行监测的功能。电动式转辙机因其可靠性强、响应速度快以及能够实现远程自动控制等优点,在目前的转辙机领域有着最高的应用率。随着我国铁路里程以及铁路运输高速化的迅猛发展,铁路信号设备发生故障,将会对人民生命财产安全造成极大的威胁,加之列车载重运输量的提升,这对目前的铁路转辙机带来了更大的挑战,因此转辙机逐渐由小功率向大功率发展。
目前的电动式转辙机普遍采用直流有刷电动机作为驱动电机,有刷直流电动机有着较为优异的控制性能,但是换向器与机械电刷的存在是其致命的缺陷。[2]换向器与机械电刷使得电机结构相对复杂,且电刷易磨损,使得电机可靠性及寿命大打折扣,因此在如今铁路高速化的运营需求下,有刷直流电机作为驱动电机的转辙机将受到严峻的挑战。
无刷直流电机是在有刷直流电动机的基础上发展起来的。它具有新式的运行原理、新式的制造工艺及控制方法。[3]目前,无刷直流电动机作为一款新式独立电机已得到了国内外专家的关注,并且相关研究已较为成熟,在汽车、航空航天、工业自动化等领域得到应用。在铁路转辙机方面,无刷直流电机的应用还很少,从有关的资料上看相关的电子控制器的设计开发是其中的难点,因此将在无刷直流电动机作为转辙机的驱动电机的研究设计具有重要的工程意义。[4]
本次研究的进行,将有效提高转辙机的可靠性,即从铁路信号设备方面提高了铁路安全性,因此也具有较为重要的社会意义。
1.3国内外研究现状
电动式转辙机根据驱动电机类型又可分为:交流电动式转辙机与和直流电动式转辙机。在我国的铁路系统中,西门子S700K系列是较为常用的交流电动式转辙机;具有我国自主知识产权的ZD系列则是目前广泛采用的直流电动式转辙机。
从20世纪50年代开始,我国就开始对国外的转辙机进行仿制,例如我国ZD1型电动式转辙机就是批量仿制苏联CπB-4型电动式转辙机。我国开始自行研制转辙机是从60年代开始,研制的过程可分为两个阶段:1960年代至1980年代围绕交流电动式机转辙机展开研究,此阶段的主要研发成果有XZDY-4型与DK22型交流电动转辙机;从1980年代开始主要围绕直流电动式转辙机进行研发,主要的研发成果有ZDZ-100/150型直流电动式转辙机。
欧美等西方国家在铁路转辙机研究方面一直处于领先地位,当前阶段欧美等西方国家及机构主要以研发高效率,经济耐用的转辙机为目标。目前国外最新的主要研究成果有:采用直接锁闭式的锁闭方式、采用球形螺旋式的转换方式、转辙装置实现枕木一体化、利用软件实现铝铸件转换控制及使用交流伺服电动机离合器替代离合器等。[5] [6] [7]
1.4主要研究内容
无刷直流电动机以电机本体、转子位置传感器和电子控制器组成。本次研究的主要目的是,研究设计出一款以无刷直流电动机为驱动电机的铁路转辙机控制系统,根据铁路转辙机工作需求:短时(变轨工作时间在9秒内)地变轨工作,且不需精准调速。因此系统可以采用控制简单的开环控制方式。主电路采用三相全校逆变器方案,并选择两相导通的导通方式。电子控制器采用GAL为核心的逻辑综合电路,转子位置传感器输出的转子位置信号与开关管驱动信号、正/反转识别信号以及过流保护信号将在GAL芯片中逻辑合成后输出六路驱动信号。并以此完成对电枢绕组的电流通断的控制,继而实现电子换向。综合以上所述内容,对本此设计的主要研究方面做以下总结:
①控制系统整体方案的确定
所设计系统的驱动电机将工作在160V的直流电压下,并可以通过PWM斩波的方式达到恒转矩控制调压调速的目的。模拟电路和集成芯片相结合的方法是目前无刷直流电动机控制系统中通常采用的控制电路方案,该类型控制电路具有可靠性高、结构简洁、电路板体积小等优点。而且为了保证电机效率,还必须考虑电机在软起动方面的设计。
②辅助电源的研究设计
所设计系统的电源是具有高压脉动的160V直流电,且存在较大变动范围;另外因为辅助电源需内装在转辙机内部,因此还应对其体积进行一定的限制。其次辅助电源其线路还应尽可能的结构简单、并且具有较高的可靠性。
开关电源是一种高频化的电能转换装置。首先,其内部电路中的的功率器件在高频开关状态下工作,减小了开关管上的损耗,因此与线性稳压电源相比其效率得到了大幅度的提高;其次,其内部电路中的高频变压器可以对电网实现隔离,减小因电网谐波的侵入对系统的损害。辅助电源是本次控制系统设计的关键的部分,它将承担着对控制系统中各种芯片供电的任务。[8]
③正/反自动识别电路研究设计
系统将根据三根进线(FOR 、REV 、COM)的极性来识别电机的正/反转。正常工作情况下,系统接入FOR 与COM或REV 与COM的两种进线的组合方式,在这种情况下,控制器将能识别出电机应采取的正/反转的工作模式;当系统接入错误接线时,即FOR 与 REV 同时接入的情况下,系统还应能自动采取保护措施。
第2章 无刷直流电动机工作原理
本章主要介绍无刷直流电动机控制系统的结构组成与工作原理,在给出其基本公式及运行特性后,分析了无刷直流电机与有刷直流电动机的区别。最后根据工作原理给出了无刷直流电机的调速和控制方法。
2.1无刷直流电动机结构及原理分析
本次所设计的铁路转辙机控制系统核心部件为驱动电机——无刷直流电动机,故本文的目的主要是以无刷直流电机为控制对象,设计出符合要求且性能可靠的控制系统。三相永磁无刷直流电机以电流驱动模式的不同而分为两大类:方波(梯形波)驱动电机和正弦波驱动电机。前者称为无刷直流电动机(BLDCM),后者称为永磁同步电机(PMSM)。[9]无刷直流电机的三相定子电流的导通和关断是由转子位置传感器输出的三个位置信号所决定的,并使得定子绕组所流过的电流波形为方波。而永磁同步电机三相定子电流的导通和关断同样是由转子的的当前位置决定,但定子绕组所流过的电流波形却为正弦波。由于无刷直流电动机方波驱动存在以下优点:①转子位置传感器结构较简单,成本低;②位置信号仅需做逻辑处理,电流环结构较简单,伺服驱动器总体成本较低;③伺服电动机有较高的材料利用率,在相等有效材料情况下,方波工作方式的电动机输出转矩约可增加15%。结合本次设计的要求控制系统选用方波驱动的无刷直流电动机作为驱动电机。
2.1.1无刷直流电动机结构组成
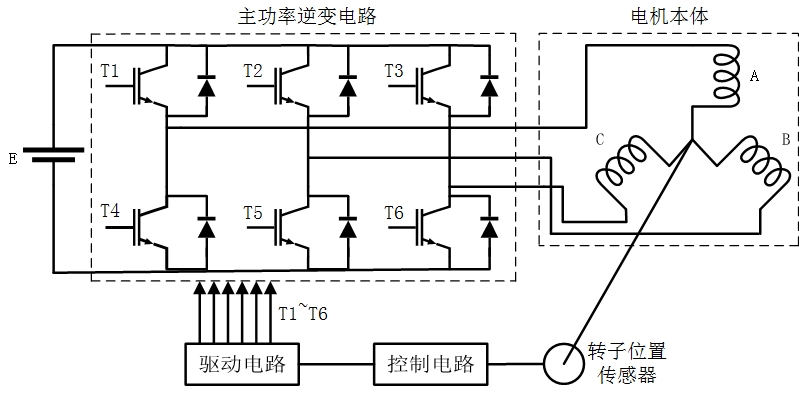
无刷直流无刷电动机系统结构组成如图2-1所示,其主要由直流电源、电机本体、转子位置传感器和电子驱动器四部分构成。
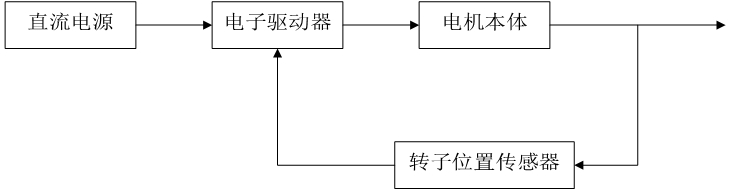
图2-1 无刷直流电动机系统结构组成
其中直流电源除为电动机本体供电外还需为电子驱动器中各个芯片供电。
电动机本体部分的结构与经典的永磁同步电机相似,都由定子和转子两部分构成。其定子上安放有交流绕组,且绕组相数可以有多种选择,一般为多相(三相、四相、五相不等)。各个绕组分别与电子驱动器相连;转子上按照一定的极对数(p=1、2、…)镶有永久磁体,并分有两种结构:一种为将瓦片状的永磁体贴在转子外表面上的凸极式;另一种是将永磁体嵌入到转子铁芯中的嵌入式。转子磁钢的形状多为瓦片型(弧形),其目的是使得定子气隙均匀且气隙磁场呈梯形分布,最终电机运行时,电枢绕组两端能够产生梯形波感应电动势。
电子驱动器是无刷直流电动机的能够正常工作的关键部件。直流电源通过主功率逆变电路向定子绕组供电,位置传感器实时监测转子所处的位置并发出信号,控制电路再根据位置传感器发出的信号来控制开关管的通断,这也就控制了定子绕组的通断电,从而实现无刷电子换向。
2.1.2无刷直流电动机工作原理
无刷直流电动机能够实现无刷换向。首先,在结构上与一般的永磁有刷直流电动机有着显著的不同。一般的永磁直流电机其定子由永久磁钢构成,并由此产生气隙磁场;其转子则由电枢绕组构成,并且在通电后由此产生反应磁场。有刷直流电机运行过程中,由于电刷的换向作用,气隙磁场与反应磁场的方向始终保持相互垂直,使得产生的电磁转矩保持在最大值上从而驱动电机持续地运转。
而无刷直流电动机其定子上安放有电枢绕组,转子则由永久磁钢构成,这就与传统永磁有刷直流电机的结构完全相反;另外,由控制电路、主功率逆变电路和位置传感器组成的电子换向装置,令通电的定子绕组产生的连续跳变磁场,与转子永久磁钢产生的固定磁场,在电机气隙空间中始终保持90°(±30°)的电角度,以此产生能够推动转子旋转的转矩。
无刷直流电动机其绕组接法可分为:星形接法和三角形接法两种。星形接法绕组是将各项绕组的尾端连接在一点上,其连接点称为中点,而每相绕组的首端再连接到电子换向装置。 三角形接法绕组是将一相绕组的尾端连接至下一相绕组的首端,直至所有的绕组首尾相接形成闭合回路,然后每相绕组间的连接点再与电子换向装置相连。若采用三角形接法,在无刷直流电动机运转时,绕组中可能会产生谐波电流环流,因而增加损耗,使得电机效率降低,由于以上原因无刷直流电动机定子绕组大多选用星形接法。
无刷直流电动机定子绕组相数可以有多种选择,原则上可从单相到十多相。从绕组利用率方面进行考虑,因为无刷直流电动机定子绕组是间断通电的,为使同时通电绕组数增加,减小通电绕组电阻,从而提高效率,可以适当地提高绕组利用率。因此从这个角度看,三相绕组效果最佳。要是从转矩脉动方面进行考虑,有分析表明,相数的增加,可以有效降低换向引起的转矩脉动。但是相数越多,驱动电路所需要的功率开光管也就越多,成本也就越高昂。因此综合多方面考虑,定子绕组采用三相绕组的方案是目前所广泛应用的。
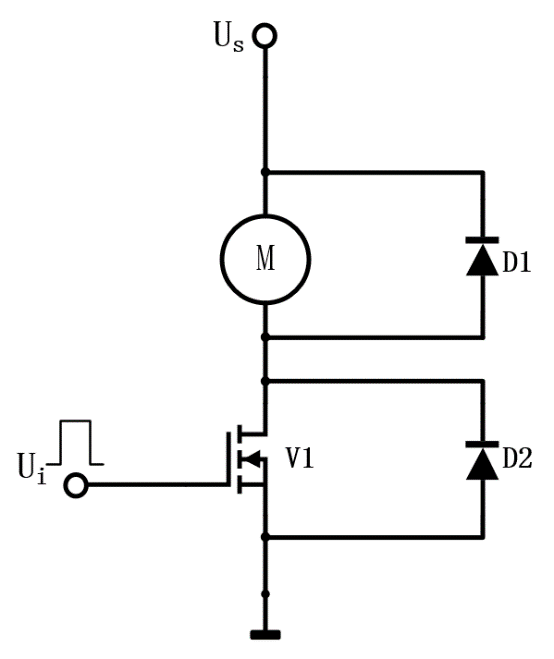
无刷直流电动机按照驱动方式划分可分为:半桥驱动和全桥驱动两种。在半桥驱动电路驱动下,每相定子绕组的电流通断仅由各自的一个功率开关进行开闭控制,因此每相定子绕组只有单方向电流通过。半桥驱动电路每相独立供电操作和结构简单,与全桥驱动电路相比减少了一半的功率开关管,因此控制电路成本较低。在全桥驱动电路驱动下,每相定子绕组的电流通断由两个功率开关共同工作进行开闭控制,因此每相定子绕组都可能流过正反双向的电流,尽管全桥驱动所使用的功率开关管更多,成本较高。但从转矩脉动等性能参数更为优异来考虑,选用全桥驱动方式是最佳方案。
 综上所述,星形连接全桥驱动三相无刷直流电动机具有最佳的性价比,因此实际应用也最多。下面就以两相导通星形三相六状态无刷直流电动机控制系统为模型,将其工作原理进行说明。
综上所述,星形连接全桥驱动三相无刷直流电动机具有最佳的性价比,因此实际应用也最多。下面就以两相导通星形三相六状态无刷直流电动机控制系统为模型,将其工作原理进行说明。
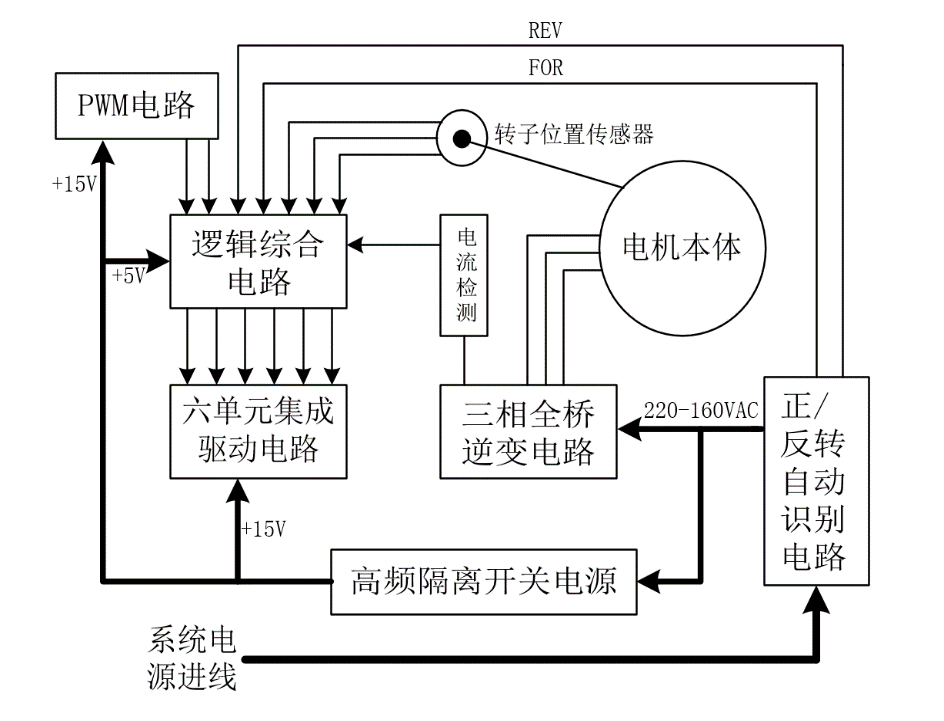
图2-2 控制系统原理框图
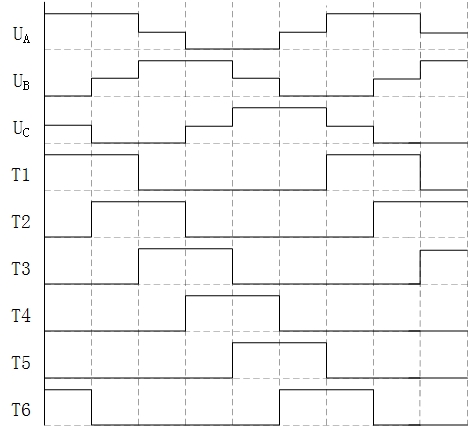
 控制系统原理框图如图2-2所示,外部给定的速度信号与转子位置传感器监测到的转子位置信号经控制电路进行逻辑合成后产生控制信号,控制信号经驱动电路放大进一步传输送到主功率逆变电路中T1至T6功率开关管的栅极,因此得以控制无刷直流电动机定子各相绕组按照一定顺序导通工作,从而在电动机气隙中产生跳变的旋转磁场,使得无刷直流电动机能够按照给定信号规定的方向旋转。
控制系统原理框图如图2-2所示,外部给定的速度信号与转子位置传感器监测到的转子位置信号经控制电路进行逻辑合成后产生控制信号,控制信号经驱动电路放大进一步传输送到主功率逆变电路中T1至T6功率开关管的栅极,因此得以控制无刷直流电动机定子各相绕组按照一定顺序导通工作,从而在电动机气隙中产生跳变的旋转磁场,使得无刷直流电动机能够按照给定信号规定的方向旋转。
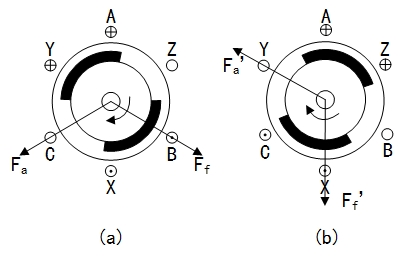
图2-3 无刷直流电动机运转时转子示意图
下面以极对数为一(p=1)的无刷直流电动机为例进一步对工作原理进行说明,其运转时定转子示意图如图2-3所示。在如图2-3(a)的状态下,即A、B绕组通电,电流由A绕组进、B绕组出,此时通电电枢绕组在电机空间产生的合成磁势为Fa。合成磁势产生原理是,首先由位置传感器监测到转子磁极位置信号,位置信号再传递至控制电路进行逻辑合成,最后合成逻辑信号经驱动电路放大驱动逆变桥中T1、T6功率开关管导通。在这个过程中电流流过的路径为:直流电源正极→T1功率开关管→A相绕组→B相绕组→T6功率开关管→直流电源负极。转子转过60°电角度后,就到达如图2-3(b)状态,A、C绕组通电,电流由A绕组进、C绕组出,此时合成磁势为Fa’,产生Fa’与Fa原理相似这里就不再作论述。此时在定子合成磁势和转子磁势的相互作用下,转子将会继续向顺时针方向转动。以此类推,转子若继续沿顺时针方向转动,每过60°电角度逆变桥中功率开关管有以下导通规律:T3T2→T4T3→T5T4→T5T6→T1T6→……,使得定转子间的相互作用总是在驱使转子沿顺时针方向连续转动。相同的,要使转子沿逆时针连续转动,逆变器中功率开关管导通规律为:T1T6→T5T6→T5T4→T3T4→T3T2→T1T2→T1T6→……。[10]
 定子绕组产生的合成磁场是一种跳跃式的旋转磁场。在图2-3(a)到(b)的60°电角度范围内,定子绕组产生的合成磁势Fa一直保持图2-3(a)的空间位置不变,直到转子磁势Ff受定子合成磁场的作用转过60°电角度到图2-3(b)的空间位置Ff’时,定子合成磁势Fa才顺时针跳变至图2-3(b)Fa’的空间位置。定子合成磁势跳变的电角度,与电机的极对数有关。
定子绕组产生的合成磁场是一种跳跃式的旋转磁场。在图2-3(a)到(b)的60°电角度范围内,定子绕组产生的合成磁势Fa一直保持图2-3(a)的空间位置不变,直到转子磁势Ff受定子合成磁场的作用转过60°电角度到图2-3(b)的空间位置Ff’时,定子合成磁势Fa才顺时针跳变至图2-3(b)Fa’的空间位置。定子合成磁势跳变的电角度,与电机的极对数有关。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: