10吨起重机旋转机构机构电气控制系统设计毕业论文
2020-02-18 11:42:38
摘 要
随着改革开放政策的持续执行,我国的现代化建设步入了一个快速发展的阶段,对于起重机的需求量也持续增长。1950年初期,中国开始在起重机方面进行研究。从1960年开始,由于人口的急剧增长,我国建起了一座座高楼大厦,为了适应工作条件,我国普遍应用了适应能力强、工作效率高的门座式起重机,并且对其持续地进行改造,比如在起重机的作业设备中使用较为先进的配置,如利用可控硅进行调速、利用直流电机进行调速、使用涡流制动器等,在旋转结构里加入液力偶合器等。正是在这个时候,我国初步步入了独立研究与制作塔式起重机的时期。
本文写的是10吨起重机旋转机构电气控制系统设计。从确定门座式起重机旋转电机的型号入手,根据设计图确定各个元器件的型号,完成10吨起重机旋转机构控制电路的设计,并画出控制程序的PLC控制图和控制程序的文章[1]。
和使用PLC控制器的控制系统进行对比,使用继电——接触控制器构成的电气控制系统的环境适应力比使用PLC控制器的电气控制系统高,然而对塔式起重机自身的构造作用力更大,只契合于小型的塔式起重机,本次设计针对的是契合于港口作业的门座式起重机,所以本文采用PLC控制系统。
本次毕业设计的题目是10吨起重机旋转机构电气控制系统设计,基本上包含旋转机构的电气控制系统设计,电器部件的选型,PLC的设计等。
关键词:起重机;旋转结构;PLC
abstract
With the continuous implementation of reform and opening up policy, China's modernization has entered a stage of rapid development, and the supply of cranes continues to grow. In the early 1950's, China began to study cranes. Since 1960, due to the rapid growth of population, many high-rise buildings have been built in our country. In order to adapt to the working conditions, portal cranes with strong adaptability and high working efficiency have been widely used in our country, and they have been continuously reformed. For example, advanced configurations have been used in the operation equipment of cranes, such as using thyristor to adjust speed and using DC motor to enter. Row speed regulation, use eddy current brake, etc., add hydraulic coupling in the rotating structure, etc. It is at this time that our country has initially entered the period of independent research and production of tower cranes.
This paper describes the design of electrical control system for the rotating mechanism of 10 ton crane. Starting with the determination of the type of the rotary motor of portal crane, the type of each component is determined according to the design drawing, the control circuit of the rotary mechanism of 10 ton crane is designed, and the PLC control chart of the control program and the article of the control program are drawn.
Compared with the control system using PLC controller, the environmental adaptability of the electric control system using relay-contact controller is higher than that using PLC controller. However, the structural force of the tower crane itself is greater, which only fits for the small tower crane. This design is aimed at the portal crane suitable for port operation. This paper adopts PLC control system.
This graduation project is about the electrical control system design of the rotary mechanism of 10 tons crane. It basically includes the design of the electrical control system of the rotary mechanism, the selection of electrical components, the design of PLC, the design of electrical wiring diagram and so on.
Key words: crane; rotary structure; PLC
目录
第一章 绪论 1
1.1 研究的目的及意义 1
1.2 门座式起重机概述 1
1.2.1 门座式起重机的发展 2
1.2.2 我国门座式起重机的控制现状 2
1.3 本文研究内容及章节安排 2
第二章 起重机方案设计 3
2.1 起重机的旋转机构 3
2.2 旋转机构的机构特点及特性分析 3
2.3设计要求 3
2.4 设计思路 4
第三章 主电路的设计及设备选型 5
3.1电路图纸设计 5
3.2 电气传动方案的选择 5
3.2.1变频调速的原理 6
3.2.2 变频调速的优点 6
3.2.3变频器接线图的设计 7
3.3 旋转机构设备选型 7
3.3.1 电动机选择 7
3.3.2 其他设备选型 7
第四章 PLC的选择与介绍 9
4.1 PLC的控制原理 9
4.2 门座式起重机的变频调速 10
4.3 旋转控制系统的思路 10
4.4 门座式起重机PLC控制系统设计 11
4.4.1 PLC的设计思路 11
4.4.2 PLC的I/O口对应关系 13
4.4.3 旋转机构 PLC 指令语句 14
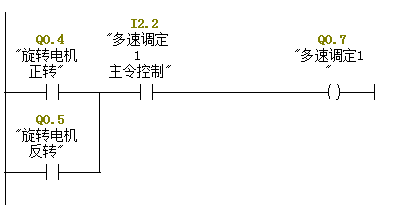
4.4.4门座起重机旋转机构的PLC程序 15
第五章 结论 20
参考文献 21
附录 22
致谢 31
第一章 绪论
1.1 研究的目的及意义
门座式起重机是立体结构,占地面积较小,为了能够在比较拥挤的地方进行工作,前人在设计时,考虑到了工作面积小的问题,设计了比较高的门架和比较长的伸臂,提升了它的起升高度和工作范围,完全可以满足港口的作业,较高的门架下方可以通过车辆,充分利用了空间;凭借着它较强的装卸能力和较小的占地面积,极大的提升了装卸生产率,向着解放人们的双手迈出了一大步。
门座起重机正朝着大型化,高速化,自动化方向发展[2]。随着港口运输行业的不断发展,门座起重机的安全可靠生产作业显得尤为重要。为了使装卸作业更加的稳定,需要我们对起重机在调速性能方面有更高的要求。
1.2 门座式起重机概述
门座式起重机是门型座架采用侧边支撑腿支撑在地基或者地面轨迹上的臂架型起重机[3]。是具备沿着地面轨迹行走,在起重机下方可以穿过工作的车子,上方有可以转动的旋转结构的起重装置,是一种臂架型起重机。起重机门形座架两侧的支腿下方可以供工作车辆通过。门座式起重机基本上都是沿着大地或建筑物上的起重机轨迹上工作,并且完成起重装卸作业。门座式起重机如图1.1所示。

图1.1 门座式起重机
1.2.1 门座式起重机的发展
随着港口事业的兴盛,门座式起重机也在持续地进行改造。1890年,人们在埠头上面的运行式半门座上装上幅度不可变的固定式可旋转臂架型起重机,初期的港用半门座起重机应运而生。随着码头的不断扩大,人们广泛使用俯仰臂架和水平变幅系统,门座和半门座起重机也不断地改善。经过了二战以后,为了增强效率,人们思考着如何使用数台起重机对同一个目标同时进行作业,转柱式门座起重机应运而生,它让旋转的部位与立体圆柱相连,有效地增强了起重机的作业效率;与此同时,滚动轴承式支承回转装置也逐渐被人接受,它的转动部分通过大轴承与门座相连,有效的缩短了旋转部位的尾径,还使用了相对占地面积较少的门座结构,也可以增强工作效率。在发展过程中,门座式起重机还逐步推广应用到作业条件与港口相近的船台和水电站工地等处[4]。
1.2.2 我国门座式起重机的控制现状
我国的港口起重机主要采用门座式起重机,从1950年开始,我国就持续地对起重机的设计、制造工艺、设备使用、维修管理等方面进行完善和革新,推动了技术的持续进步[5]。但是在现实世界中依然存在着许多难题,这需要我们坚持不懈的努力。
随着我国重型工业的高速发展,起重机设备的数量也在急剧上升,技术也不断完善,凭借着较强的起重机械生产制造能力,中国在小吨位的起重机生产制作方面早已达到了世界领先地位。但是由于中国研究大吨位的门座式起重机的时间还比较短,在大吨位的门座式起重机的研究和生产制作等地方,中国与欧美等国外发达国家还存在着不短的距离,可靠性和稳定性都不如国外发达国家,这也是国家交给我们年轻一代的重任。
由于发动机、液压件、高质量钢材等重点元件的主要技术被欧美等发达国家的工厂所控制,中国对门座式起重机的重点元件研究水平进展比较缓慢,很大程度上限制了我国门座式起重机的发展,减少了市场占有率[6]。这也是起重机研发方面和机械行业方面共同面临的挑战。
1.3 本文研究内容及章节安排
本文主要研究内容如下:
第一章:介绍选题的目的和意义,并查阅文献归纳总结门座起重机研究发展现状。
第二章:研究门座起重机的整体结构,旋转机构的机构特点、特性分析、设计要求、设计思路。
第三章:完成主电路的设计,变频调速的原理,设备的选型。
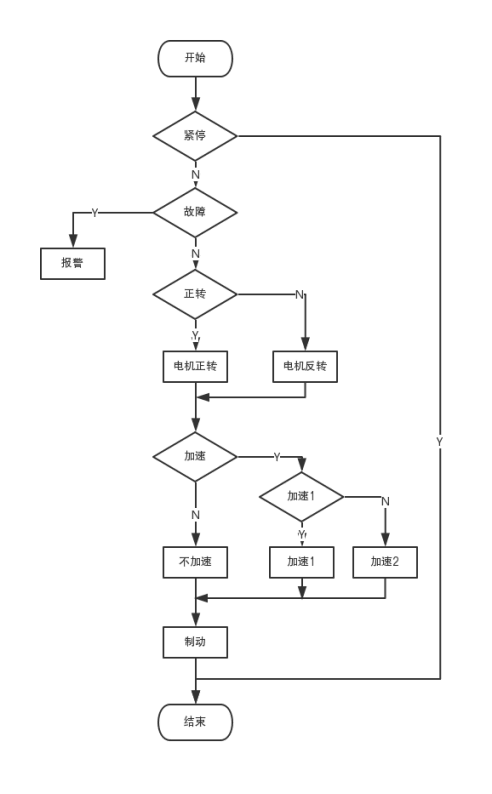
第四章:分析门座起重机PLC控制系统的控制思路、控制流程 ,归纳出PLC输入输出归纳点,进而设计出一套稳定可靠的PLC程序。
第五章:总结上述内容,反思论文不足之处并展望进一步研究方向。
第二章 起重机方案设计
2.1 起重机的旋转机构
旋转机构是起重机的旋转部分围绕旋转中心线进行整机旋转以适应不同工作方位的机构[7]。它的作用是控制货物绕着旋转中心线向指定方向移动。
旋转机构由支撑装置和驱动机构俩部分组成。旋转支撑装置将起重机的旋转部件和非旋转的机身连接起来,为旋转机构提供稳定的支撑。旋转驱动机构则是为旋转部件提供动力和速度,使旋转动作完成,属于传动装置。驱动装置是旋转机构的主要工作部件,这种装置可以让起重机做到低速正反转,而且制动稳定、安全可靠。在设计时,需要考虑受力方面的因素,旋转驱动机构必须克服自身旋转支承装置中的摩擦阻力矩、风阻力矩和由工作地点稍微倾斜造成的旋转阻力矩。
2.2 旋转机构的机构特点及特性分析
旋转机构的作用是使起重机的旋转部分作旋转运动,控制货物绕着旋转中心线向指定方向移动,需要旋转机构可做200°旋转作业。这个机构需要2台旋转电机驱动,电动机功率为22KW。因门机需要在最短时间内达到目标,所以需要门机有正转和反转的功能,所以旋转电机也需要能够向着正反2个方向驱动;起动共分为4个档位,可以实现加减档1位或2位,对调速方面的需求较高,如今人们大多使用变频器完成分级起动和调速控制。旋转机构由电动机提供动力源,动力经过偶合器传达到减速器,使得齿轮组围绕旋转机构的中心轴线工作,带动大齿轮做回转运动。但是旋转机构的转动惯量比较大,虽然我们需要该机构运行的频率较高,但是它完成作业的时间需要少于起升机构,对工作效率的影响低于起升机构,本次设计不需要过载保护。
2.3设计要求
目前门座式起重机多用于港口货物装卸,起重量相较于其他工业较小,设计数据 10T,整机根据工作需求,可以变换吊钩和抓斗(特殊情况下亦可更换其他)两种吊具。臂架工作幅度较大范围较广,在带载的情况下可以完成旋转和变幅行走等工作。起重机使用 380V/50HZ 三相四线工业用交流电源,电机使用三相异步电动机,包含工作电机、风机等不同类型。起重机除去相关工作机构外,还应当有相应的电气和机械保护装置,以及部分辅助装置(如风机和照明等)。
控制系统采用 PLC 控制芯片,工作机构应当设置不同的工作挡位和保护控制,尽量保证高效稳定工作的同时,还能减少部件与功耗,在适应复杂工作的同时,也能做到安全可控。
2.4 设计思路
整机设计使用 380V/50Hz 交流电,在进线主线路设置总断路器开关,保证机器系统可以一次性关闭控制。主线上增加电流电压表和功率表,监控并记录工作状态,实时反馈给操作人员。
主线上接入四个工作结构,分别包含主工作电机、制动器、风机和变频器部件。根据工作需求的 10T 计算各个部件的最大功率,选择合适的主电机并进行校验计算。确定好主电机后选择相应的变频器和制动单元,按照工作条件选择制动电机功率和元件类型,根据工作环境条件选择散热风机。
PLC 的设计上,要有各个部件的断路器,保证检修工作的适宜工作条件。在临界工作位置添加限定位,保证工作部件的工作范围。旋转结构增加速度挡位,可以用于更多种类的工作需求。在主线上还接入有主控输入和输出电源,用以控制起重机工作机构的启动与关闭,同时添加屏幕实现人机交互,工作机构之外的机柜区间也设计有照明和散热风扇电路。机柜外置备外接插孔,将交流电变频变幅到合适的数值用以实现其他需求。
第三章 主电路的设计及设备选型
3.1电路图纸设计
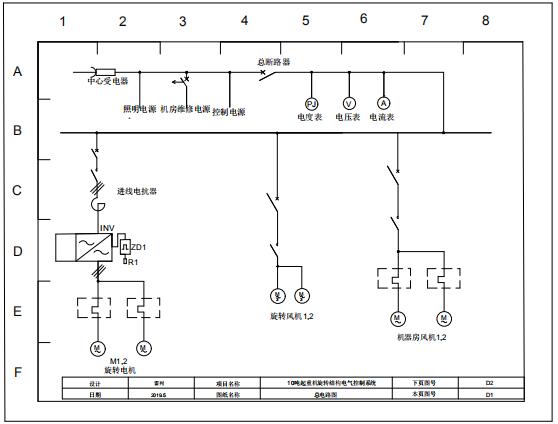
本次毕设设计为10吨起重机旋转机构电气控制系统设计,总电路图如附录图A1所示。工频电源经过中心受电器,为本次设计提供的照明电源、机房维修电源和控制电源,然后通过总断路器对整个系统进行通断控制,电度表、电压表和电流表对系统进行监控管理。最后电能经过断路器、接触器和电抗器到达旋转机构的变频器,由变频器进行变频处理才输出到旋转电机。旋转机构共有2台旋转电机,通过变频器制动单元进行制动。旋转风机和机房风机并不需要变频器进行调速,可以直接提供断路器和接触器进行控制。
工频电源为在照明单元提供电能时,直接通过变压器进行变压处理连接到外接插头上,通过外接插头对机房进行供电,作为整个机房的照明电源。
工频电源为在机房维修单元提供电能时,与照明单元类似,通过变压器进行变压处理连接到外接插头上,通过外接插头进行供电,作为整个机房的维修电源。
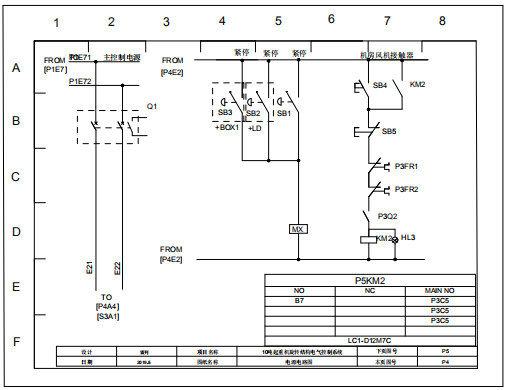
工频电源为在控制单元提供电能时,也需要通过变压器进行变压处理,与照明单元和机房维修单元不同的是,经过变压器变压处理后的电能不经过外接插头,而是通过断路器、变频器等直接连接到主控制单元、PLC输入单元以及输出单元。在主控制单元中,需要在控制交互部分添加紧停按钮,对异常情况进行紧急停机处理,防止发生意外。紧停装置如附录图A2表示。
工作电源经过电度表、电压表和电流表监测后,还需要在电压检测中连接相序检测装置,检测无误后才输出到旋转机构、旋转风机及机房风机处,与此同时,还需要保留一个接出线路作为备用线路,在其他线路出问题时可以直接使用,防止耽误工作。在这些电路中,都需要接入单独的断路器进行控制。如附录图A3表示。
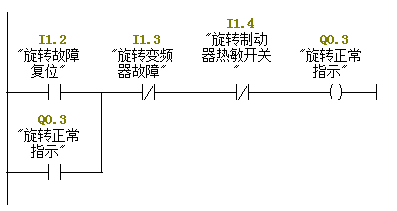
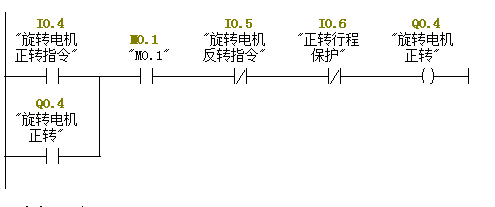
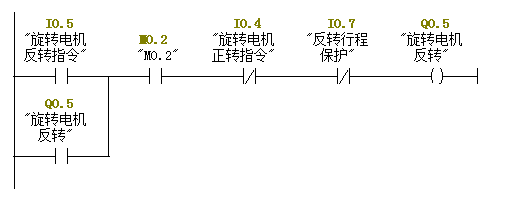
当电源接入到旋转机构电路时,需要经过断路器通断控制接入变频器,在PLC控制下进行变频处理,变频后的电流控制2台旋转电机工作,变频器与相应的制动单元相连,作为旋转电机的制动器。在变频器上需要连接诸多控制电路,比如左旋、右旋、故障复位、多速一、多速二、备用等。如附录图A4所示。
3.2 电气传动方案的选择
因为码头的货物比较繁多,工作环境也不是很好,为了满足人们在工作方面的要求,起重机需要有不同的速度档位。但是在工作中速度变化的频率较高,使用传统的机械调速不能满足工作要求,所以人们常用变频调速的方法实现换挡操纵。起重机调速的方法一共有两种,一种是直流调速系统,一种是交流调速系统[8]。人们在大型起重机电气控制系统常常使用交流变频调速的方式。
交流变频调速方式是通过改变电机的定子频率,从而改变电机同步转速的调速方法[9]。与其它起重机调速方式相比,优点较为明显:效率高,无附加损耗;应用范围广,可普遍用于笼型异步电机;调速范围大,精度高,适用于要求精度高,调速性能好的生产设备中。
3.2.1变频调速的原理
根据交流异步电动机的转速表达式:

(3.1)
由上式可以看出改变电动机定子电源的频率f、异步电动机的转差率s、电动机的极对数p都会影响电动机的转速,所以只是使用改变供电电源的频率的方法并不能获得较为理想的调速特性。使用变频调速的方法调节电动机转速,改变电动机的定子电压和定子频率可以达到较为理想的调速特性[10]。
3.2.2 变频调速的优点
使用变频调速和PLC(可编程控制技术)实现门座式起重机电气系统的控制,可以显著地提高门座起重机的安全性、可靠性,装卸效率也比较高,能源损耗较低,维修费用也低于直流调速系统,可以在很大程度上解放了人们的双手[11]。可以满足多种环境下的作业需求。其优点主要表现在以下5点:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: