基于多传感器的共享式自行车智能锁控管理系统外文翻译资料
2023-05-16 15:24:55
英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
基于多传感器的共享式自行车智能锁控管理系统
摘 要
共享单车作为一种更加环保的交通工具,在许多城市越来越受到人们的欢迎。然而,随意停车严重影响了城市的外观和交通安全。为了实现合理停车,本研究提出了一种基于多传感器的创新自行车智能锁。首先,将多传感器融合定位算法应用于本研究方案中,以判断停车场的位置和定位是否正确。其次,通过 RFID 技术,系统读取智能锁射频卡上的信息进行用户认证,并利用窄带物联网实现设备与服务器之间的通信。最后,通过在线监测和报警软件,系统可以实时监测自行车停放情况。为了提高事件判断的准确性,数据采用卡尔曼滤波算法进行处理。实验结果表明,合适的方向误差阈值为10度,自行车平均解锁成功率为98% ,平均延迟时间为4595.06 ms,不适当停车的判断准确率达到100% 。因此,该系统通过提醒和要求用户正确停放自行车,并在自行车摔倒时进行报警,可以使共享单车的停放更加整洁。自行车管理员也可以及时跟踪自行车状态信息。
Ⅰ 引言
共享单车是企业提供的自行车分时租赁服务。目的是解决现有公共交通站点与居住建筑之间的交通问题,提高资源利用率[1]。第一个自行车共享系统于20世纪60年代在荷兰的阿姆斯特丹推出[2]。目前,自行车共享作为智能城市的重要组成部分已经覆盖了世界各地的许多城市,使人们的旅行更方便有效,并促进节约能源和减少排放[3][4]。然而,由于共享单车数量过多,道路拥堵和自行车随意停放,严重影响了城市的外观和人们出行的安全。引导人们在合适的位置停车已经成为一个重要的问题。
在引导共享单车合理停放的研究中,已经取得了一些成果。Giken Seisakusho 公司设计了一个带有圆柱形地下车库的地下自行车停车系统,可容纳204辆自行车[5]。为了确保自行车上锁并且不影响公共秩序,欧洲公司 Dropbyke 要求用户将自行车停放在公共自行车停车位并上传照片。捷克共和国的一个城市 Hradec Kraacute;loveacute; 在地铁站附近建造了一个全自动自行车停车塔,共有7层,可以存放117辆自行车。虽然上述三种方法可以解决共享单车合理停放的问题,但增加了人力成本,降低了使用的便利性。为了提高 ofo 自行车的通信可靠性和降低能耗,ofo 公司与中国电信和华为合作,将窄带物联网技术应用于 ofo 自行车。为了调节自行车的停放位置,刘虎等人提出利用射频识别技术(RFID)建立一个射频网络,建立一个共享的自行车精确定位系统,使自行车上的标签只能与固定堆中的读者通信[6]。金通公共自行车技术有限公司提出使用 RFID 技术代替蓝牙和二维码作为一种识别手段,以减少解锁时间[7]。袁旭等人提议使用北斗卫星导航系统(BDS)来指定某一特定区域的经纬度作为停车评估标准,并开发了电子围栏系统[8]。为了确保自行车只放在指定的位置,Ja Binhu 等人提出了将姿态传感器应用于共享自行车[9]。上述每种方法都有自己的优势,但需要进一步改进来解决这些问题。首先,在获得姿态数据后需要进行一些处理,以提高准确性,避免错误判断。其次,以往的研究没有考虑到自行车坠落对公共秩序的影响,这就需要开发一种报警系统,以便及时通知负责人员。最后,数据库服务器缺乏监测和可视化状态要求实时监控和数据分析,没有这些,就无法实现更好的服务。鉴于上述问题,没有相关的研究人员提出适当的解决方案。
因此,本研究提出了一种新颖的共享单车智能锁设计方案。该系统在解锁时调用 RFID 读写器,并通过 NB-IoT 将用户信息传输到系统服务器。在锁定过程中,系统从北斗模块和地磁模块获取数据,并对数据进行卡尔曼滤波处理,然后与服务器获取的信息进行比较。如果当前自行车的位置和姿势不符合要求,系统会提醒用户及时调整。在停车阶段,它判断自行车的状态,如果判断失误,它通过 NB-IoT 模块向服务器发送信号,并立即从后台派出相关人员处理遗失的自行车。
本文的其余部分组织如下。第二部分,根据物联网的三个层次给出了每个层次的软件设计和硬件设计。第三部分是系统测试和分析。第四部分总结全文。
Ⅱ 材料和方法
A.智能锁的总体结构
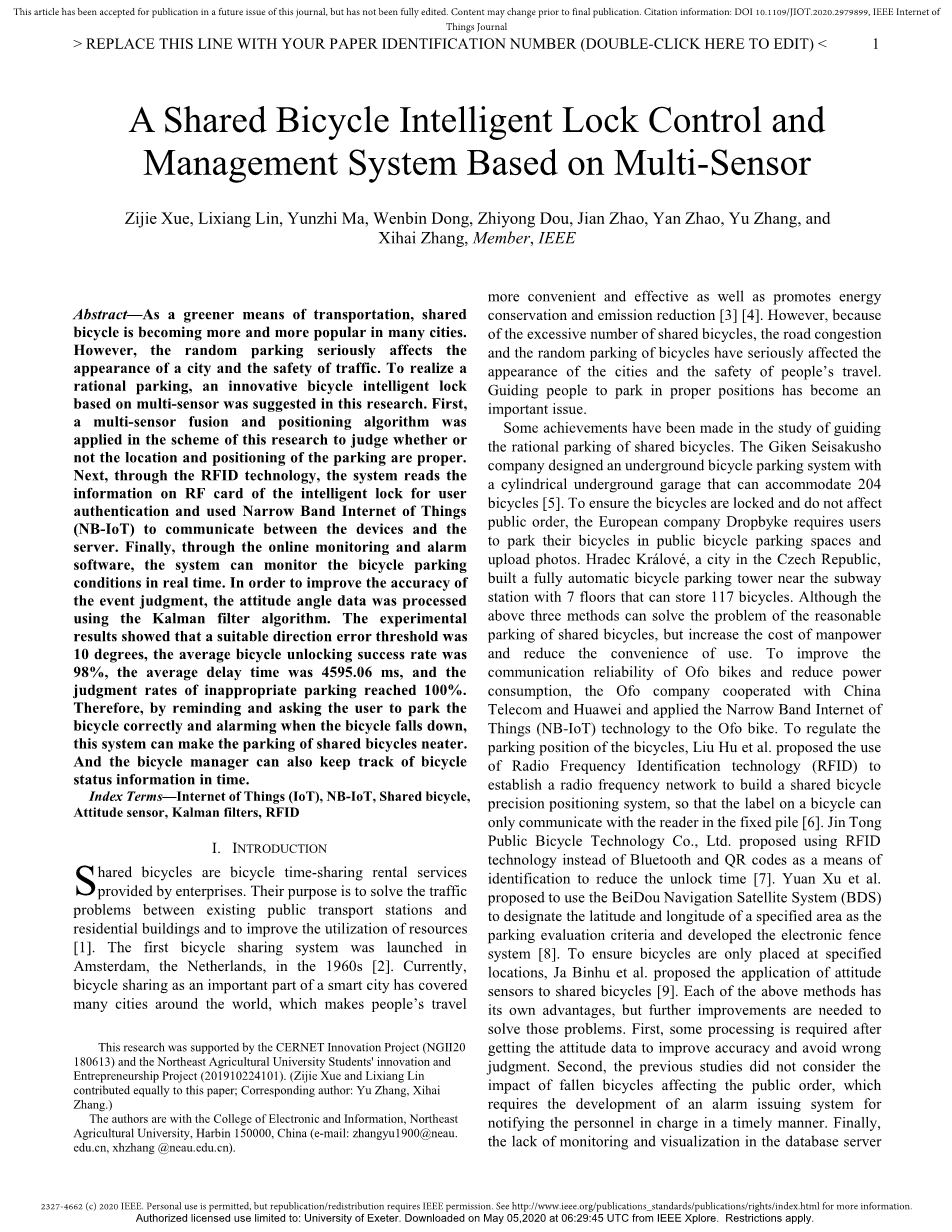
智能锁控系统采用分层设计思想,分为硬件层、传输层和应用层三个层次。该结构如下图1所示。
图1系统的总体结构
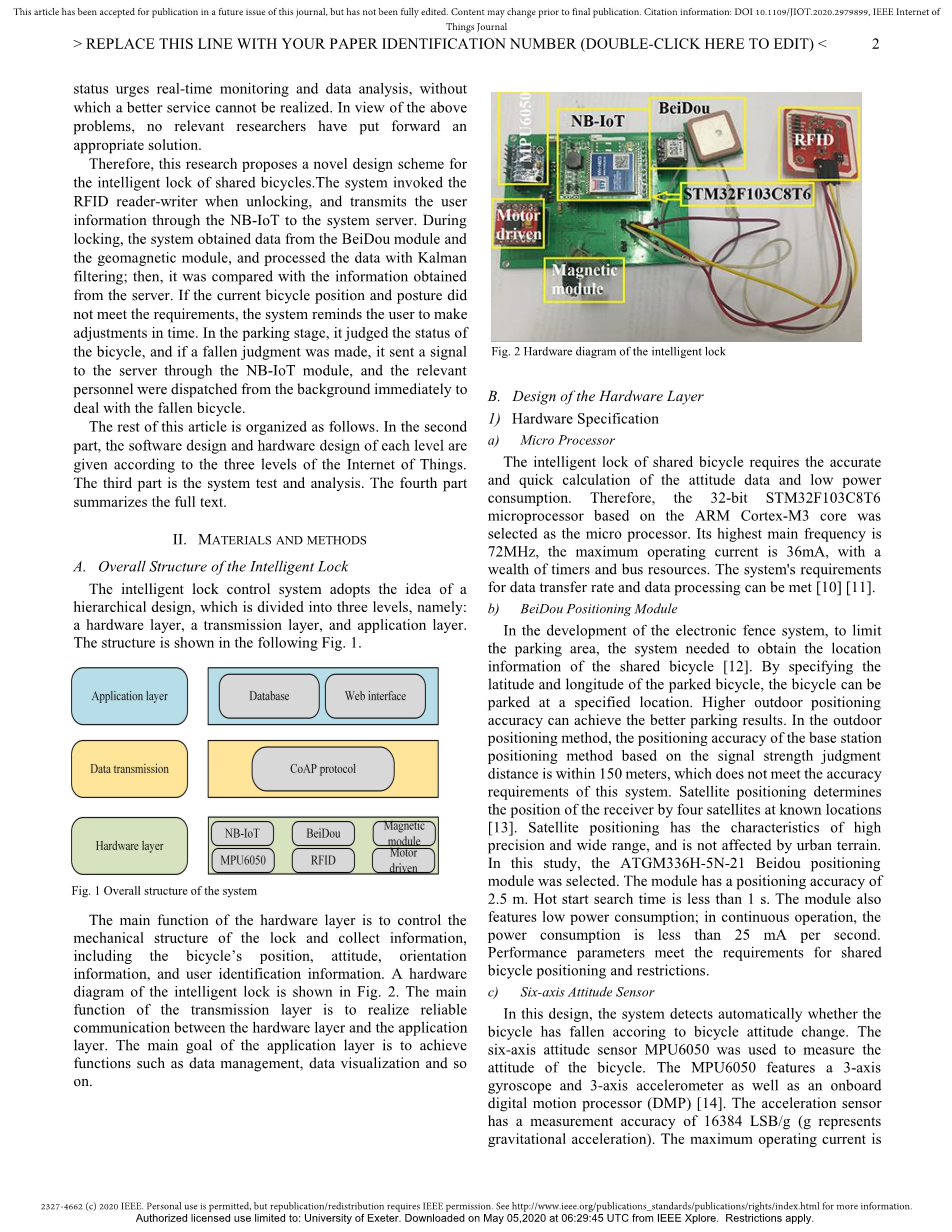
硬件层的主要功能是控制锁的机械结构,收集自行车的位置、姿态、方向信息和用户识别信息。智能锁的硬件图如图2所示。传输层的主要功能是实现硬件层和应用层之间的可靠通信。应用层的主要目标是实现数据管理、数据可视化等功能。
图2智能锁的硬件原理图
B. 硬件层设计
1)硬件设计
a)微处理器
共享式自行车智能锁需要对姿态数据进行准确、快速的计算,且功耗低。因此,基于 ARM cortex-m3核心的32位 stm32f103c8t6微处理器被选为微处理器。它的最高主频为72mhz,最大工作电流为36ma,配备了丰富的定时器和总线资源。系统对数据传输速率和数据处理的要求可以满足
b)北斗定位模块
在电子围栏系统的开发中,为了限制停车面积,系统需要获取共享单车的位置信息[12]。通过指定停放的自行车的经纬度,自行车可以停放在指定的位置。更高的户外定位精度可以达到更好的停车效果。在室外定位方法中,基于信号强度判断距离的基站定位方法定位精度在150米以内,不能满足系统的精度要求。卫星定位通过四颗卫星在已知位置确定接收器的位置[13]。卫星定位具有精度高、范围广的特点,不受城市地形的影响。在这项研究中,选择了 atgm336h-5n-21北斗定位模块。该模块的定位精度为2.5米。热启动搜索时间小于1秒。该模块还具有低功耗的特点; 在连续运行中,功耗低于每秒25毫安。性能参数满足共享自行车定位和限制的要求。
c)六轴姿态传感器
在本设计中,系统根据自行车的姿态变化,自动检测自行车是否已经跌落。六轴姿态传感器 mpu6050被用来测量自行车的姿态。Mpu6050具有三轴陀螺仪和三轴加速度计以及机载数字运动处理器(DMP)[14]。加速度传感器的测量精度为16384 LSB/g (g 代表重力加速度)。最大工作电流是3.8mA, I2C 传输高达400khz。通过数据融合解决方案,可以解决三轴欧拉角[15]。
共享自行车被简化为一个刚体,共享自行车从一个直立的姿态转换为任意的姿态,可以近似于一个定点刚体的旋转,如。图3。对于三维空间中的坐标系,任何坐标系的方向都可以用三个欧拉角表示。参考系统,也称为实验室参考系统,是静态和静止的。然而,坐标系是固定在刚体上并随着刚体的旋转而旋转的。Xyz 轴被设定为参考系的参考轴。Xy- 平面和 xy- 平面的交点被称为交线,由N. 一种欧拉角可以静态定义如下:
alpha;是 x 轴与相交线之间的夹角,beta; 是 z 轴与 z 轴之间的夹角,gamma;是相交线与 x 轴之间的夹角
根据 beta;的绝对值(z 轴垂直于水平面)的变化,他是判断自行车是否已经倒下的重要依据。
图3三个欧拉角
d)磁性传感器
由于不同地区的停车要求不同,因此有必要根据实际情况限制不同的自行车方向。在规定的区域内,为了确定自行车的方向,有必要准确地确定自行车的停放方向。方向可以根据传感器与地球磁感应强度线之间的夹角计算出来,方向可以根据传感器[16][17]上敏感元件的各向异性来判断。Honeywell 的 hmc5983磁传感器被用于这个设计来测量自行车的方向。地磁传感器 hmc5983是一个带有温度补偿的三轴集成电路罗盘传感器。路径角度测量的精度高达1 ° 到2 ° ,使用 I2C 总线可以输出高达200hz 的数据。因此,这种地磁传感器可以满足这种设计的需要。
e) RFID 射频模块
共享自行车用户身份验证的方法很多,如动态密码验证、二维码扫描验证、蓝牙连接验证等。然而,这些验证方法都是基于手机的,这给一些特殊用户带来了不便,比如学生和老年人。在这个设计中,RFID 被选为认证方法。RFID 阅读器模块通过射频信号获取存储在 RFID 电子标签中的身份信息,并将信息传输到服务器进行身份验证。本设计采用 PN532 RFID v3模块,读取距离可达5cm-7cm,支持 I2C 通信协议。低功耗模式下的电流为45ma。这种类型的验证使识别更加方便和有效[18]。
f) 通信模块
NB-IoT 是一种新的物联网通讯方式。因为它支持广域网中低功耗设备的蜂窝数据连接,所以它也被称为低功耗广域网(LPWAN)。运营商可以直接对现有的蜂窝基站进行改进,降低部署成本,实现平稳升级。
共享自行车在应用中有许多特殊性,比如广泛的活动领域,大量的部署,免费等等。由于 NB-IoT 具有易于连接、高覆盖、低功耗、低成本等优异性能,可以取代 GPRS 等传统通信方式来解决上述问题[19][20]。在本设计中使用 WH-NB75-B5 NB-IoT 模块作为通信模块。
WH-NB75-B5 NB-IoT 通信模块的通信带宽为850mhz。通过一个简单的 AT 指令配置,它可以实现数据从串口到网络的双向透明传输。它支持双向 UDP 连接,以及定制的注册包和心跳包功能。它特别适用于电池供电的场景,峰值功耗为0.5 a/3.8 v,休眠功耗为20mu;a/3.8 v。该设备可以使用电池供电,电池可以在合理的运行情况下使用多年。
2) 软件设计
a)设计原理
软件设计采用了模块化的思想。基于不同的功能,软件设计分为解锁过程、锁定过程和监控过程。在 Windows 操作系统中,MDK Version 5用 c 语言编写系统程序到 STM32,最后用串行刻录工具刻录单片机。
解锁过程
外部中断按钮用于进入解锁程序。首先,stm32微处理器发送命令来激活 PN532 RFID 模块,RFID 模块不断发出卡片搜索指令。然后,如果 pn532模块在规定时间内没有接收到 RFID 卡信息,则模块进入休眠模式,否则激活 NB-IoT 模块向服务器发送用户查询指令并立即跳转。在发送后跳出中断子程序,等待通信模块检索服务器数据。最后,如果它从服务器接收到许可命令,它就会驱动马达完成解锁任务。解锁过程的伪代码如图4所示。
图4解锁过程的伪代码
b) 锁定程序
锁定过程的伪代码如图5所示。锁定程序是由一个外部中断按钮启动的。Stm32微处理器首先从北斗模块读取原始信息,解析当前位置的经纬度,然后激活 NB-IoT 模块向服务器发送位置查询指令,发送后立即跳出中断子程序。下一步,服务器根据查询指令中的位置信息查询数据。如果没有相关的定位数据,数据不会返回。如果相应的方向信息被查询,相应的信息将返回给模块。最后,stm32微处理器将接收到的方向信息设置为指定信息。当用户调整自行车的方向到一定范围内的指定方向,stm32驱动电机,用户可以手动锁定自行车。
图5 上锁过程的伪代码
c) 监察程序
监控过程的伪代码如图所示。微处理器以10秒的周期被定期唤醒,以进行状态查询。首先,stm32微处理器通过 I2C 通信协议从 mpu6050模块读取当前状态的四元数,并将其与姿态信息进行融合,得到三个欧拉角,即俯仰角、偏航角和滚转角。然后,对旋转角度进行卡尔曼滤波,结果成为自行车的当前姿态数据。最后,如果自行车姿态的滚转角数据在一段时间内超过阈值,则启动 NB-IoT 模块向服务器发送警报信息。
图6监控过程的伪代码
3)卡尔曼滤波算法设计
卡尔曼滤波和互补滤波是姿态传感器中常见的数据处理算法[21]。卡尔曼滤波比互补滤波具有更高的精度和更快的速度[22] ,因此本研究采用卡尔曼滤波算法对姿态传感器数据进行优化。
假设系统的状态方程和测量方程如下:
测量公式是:
在方程(1)中,x 是系统在时间上的状态,系统在时间 k 的控制量。A 和 b 是系统参数,是过程噪声项。在方程(2)中,yk 表示在时间上的测量值。 h 是测量系统的参数,是测量噪声信号测量噪声信号。
假设输入噪声和观测噪声遵循正态分布,卡尔曼滤波推导过程如下。
状态预测公式是:
在方程(3)中,Xk 是 k 矩的估计值,k 矩是一个二维的列向量, roll 是滚动角,A 代表 a二维方阵, dt 是采样时间. xk-1是 k-1矩的最佳估计,B 是一个二维列向量。
C. 传输层的通信协议
Wh-nb75的工作模式有三种: CMD 指令模式、 CoAP 透明通信模式和简单透明通信模式。在 CMD 指令模式中,采用参数配置命令。UDP 通信命令和 CoAP 通信命令都通过频繁的 AT 命令进行操作,需要进行数据解析。CoAP 透明通信是一种固定的收发机制,易于操作。通过配置相关的服务器地址和端口号,可以实现设备和服务器之间的透明通信。通过创建 UDP 套接字实现了简单的透明通信模式,并通过简单的参数设置实现了设备与服务器之间的数据透明通信。
为了使系统简单、可靠和便携,本研究选择了 CoAP 模式作为 wh- nb75的工作模式。通信流程图如
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[591351],资料为PDF文档或Word文档,PDF文档可免费转换为Word



