恶劣海况下船舶推进系统控制策略研究毕业论文
2020-02-19 09:03:05
摘 要
近年来,电力推进在船舶领域的应用越来越广泛,自然也就要求其推进系统在海上的安全性、便捷性和稳定性,尤其是在海上这种特殊环境中,常规的控制策略已经无法满足其需求,所以对推进系统的控制策略提出了更高的要求。本文主要针对恶劣海况下船舶的推进系统控制策略,使用Matlab/Simulink仿真方法对船舶推进系统相关控制策略进行性能分析和方案策划。
本文先对船舶阻力、推力系数的损失进行研究,并搭建船桨模型。先提出一般海况下船舶转速、转矩和功率控制策略,再分析恶劣海况下螺旋桨出入水现象对螺旋桨产生的推力和转矩的影响,基于一般海况下控制策略,提出恶劣海况下带动态限速模块的抗过旋控制策略(抗过旋控制策略#1)和带卷气识别模块的抗过旋控制策略(抗过旋控制策略#2),并在抗过旋控制策略#2中设计两种卷气效应识别器来侦测卷气效应。
关键词:恶劣海况;转速控制;转矩控制;功率控制;抗过旋控制;推力损失
Abstract
In recent years, the application of electric propulsion in the field of ships has become more and more extensive, and naturally it requires the safety, convenience and stability of the propulsion system at sea. Especially in the special environment of the sea, the conventional control strategy can not be used. To meet their needs, so put forward higher requirements for the control strategy of the propulsion system. This paper mainly focuses on the propulsion system control strategy of ships under severe sea conditions, and uses Matlab/Simulink simulation method to analyze the performance and plan of the ship propulsion system related control strategy.
This paper first studies the loss of ship resistance and thrust coefficient, and builds a ship paddle model. Firstly, the ship speed, torque and power control strategies under general sea conditions are proposed. The paper analysed the effect of the propeller in-and-out-of water phenomenon on the thrust and torque. In extreme sea conditions, the anti-spin controller with dynamic speed limit model (anti-spin controller #1) and the anti-spin controller with ventilation recognition model (anti-spin controller #2) based on combined controller have been proposed. In the anti-spin controller #2, three ventilation recognition methods have been designed to detect ventilation incident.
Key words: extreme sea conditions; speed control; torque control; power control; anti-spin control; thrust loss
目 录
第1章 绪 论 1
1.1 选题背景及研究意义 1
1.2 国内外研究现状 1
1.2.1 船舶电力推进系统国内外研究现状 2
1.2.2 船舶推进系统控制策略国内外研究现状 3
1.3研究内容及章节安排 4
第2章 船舶推进系统阻力及损失分析 6
2.1 引言 6
2.2 船舶阻力 6
2.1.1 摩擦阻力的计算 6
2.1.2 剩余阻力的计算 7
2.3 螺旋桨水动力分析 8
2.4伴流系数及推力减额系数 9
2.5 外界工况对推进系统的影响 11
2.5.1 进水量的影响 11
2.5.2 螺旋桨盘面积损失 12
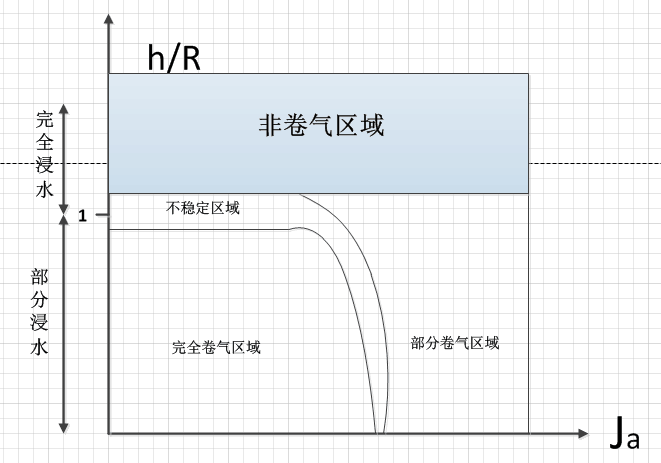
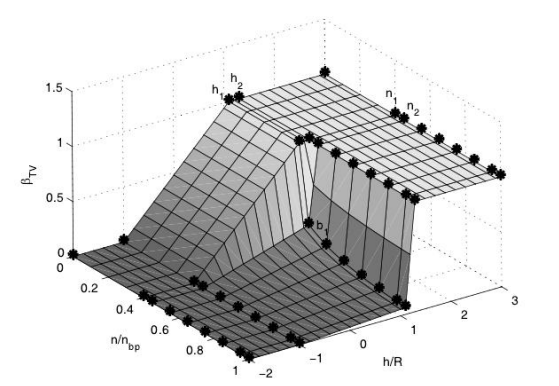
2.5.3 卷气效应 12
2.5.4 推力滞后效应 13
2.5.5 推力和扭矩总损失 14
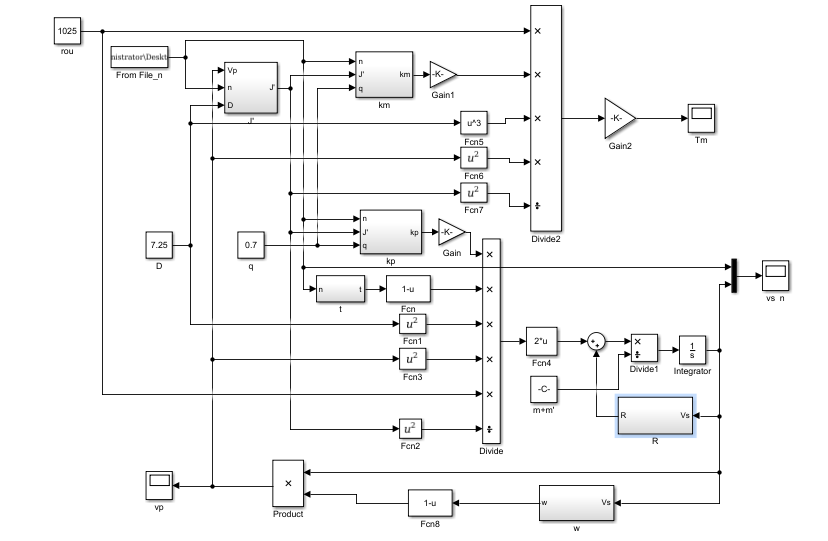
2.5.6 仿真模型 14
2.6船机桨运动模型 15
2.7 本章小结 17
第3章 一般海况下船舶推进系统控制策略研究 18
3.1 引言 18
3.2 船舶电力推进系统数学模型 18
3.2.1 电机动态数学模型 19
3.2.2 传动轴动态数学模型 19
3.3 推进系统常规控制策略 19
3.3.1 摩擦转矩和转动惯量补偿模块 20
3.3.3 转矩限制模块 21
3.3.4 转速控制策略 21
3.3.5 转矩控制策略 22
3.3.6 功率控制策略 22
3.4 小结 23
第4章 恶劣海况下船舶推进系统控制策略研究 25
4.1 引言 25
4.2 抗过旋与防抱死系统类比分析 25
4.3 抗过旋控制策略目标及原理 26
4.3.1 抗过旋控制策略目标 26
4.3.2 抗过旋控制策略原理 27
4.4 卷气效应识别器 27
4.4.1 实验图谱插值法 28
4.4.2 卷气效应估测法 29
4.5 抗过旋控制策略 31
4.5.1 抗过旋控制策略#1 32
4.5.2 抗过旋控制策略#2 33
4.6 本章小结 35
第五章 总结与展望 36
5.1 全文总结 36
5.2 不足之处与后续展望 36
参考文献 37
致 谢 39
第1章 绪 论
1.1 选题背景及研究意义
一直以来,船舶推进技术一直受到船舶领域内的研究,推进装置有柴油机带动的定距或变距螺旋桨,还有电推进装置。近几年来,电力推进技术一直都是船舶领域内研究的热点,船舶电力推进是指由燃气轮机或柴油机等动力机械驱动同步发电机向电网提供能量,然后供电动机驱动螺旋桨转动,从而推动船舶航行。由于船舶电力推进系统具有优越的操纵性能、较低的燃油消耗以及较高的安全可靠性等优点,已成为船舶行业的研究热点。且随着船舶电力推进系统相关技术不断突破,电力推进系统不仅在挖泥船、破冰船、科探船等工程船上的应用越来越广泛,而且在渡轮、游船、半潜船、海上钻井平台、豪华游艇等方面也显示出了广泛的应用前景[1,2]。
在大海上,海况不全是正常、平稳状态,大多时为海况恶劣,工况复杂多变,且船舶在实际运行中,螺旋桨负载波动频繁。船舶运行在海洋环境下,海况对其有极其重要的影响。一种海况分类方式是按照波的等级分类可以分为0-10级,波级定义为海面波动程度的强弱,波动程度越强,即波浪越高,则波级越大,0级表示无浪状态,10级表示极端恶劣状态。按船舶在任务海域的正常承载情况,可以将任务海域的海况分为灾害性海况、危害性海况、恶劣海况、一般海况。对风浪进行预报,可以对恶劣天气和海况提前预警,规避危险情况,避免损失,保证出海人员的生命安全,对航运安全具有着重要的指导意义。根据风的大小与海况对应的关系,我们可以将海况分为极端恶劣海况和正常平稳海况,以及介于他们之间的一种海况[3]。
在平静海况运行的船舶,可以平稳的运行,由于螺旋桨全部浸没在水里,所以基本上没有卷气损耗,这种是比较理想情况。但如果遇到恶劣海况,船舶在海上正常行驶及操作就变得困难,螺旋桨会出现出水,会有卷气效应产生,对船舶行驶安全会造成极大不良影响。而且在恶劣海况可能会突发断电,所以必须有足够的电力储备来满足电力高峰。除了推力和不良的瞬态功率损耗,如出现大的推力损耗就会导致推进装置的机械磨损严重,会产生严重的后果[4]。本文针对恶劣海况和一般海况研究不同海况下船舶推进系统控制策略,对船舶作业有着重要意义。
1.2 国内外研究现状
1.2.1 船舶电力推进系统国内外研究现状
目前美国、法国、德国等发达国家在船舶电力推进系统领域发展较快,早期的电力推进方式是采用推进电机 轴系螺旋桨,现在先进电力的推进方式有吊舱式推进器和无轴轮缘推进器。
图1.1展示的是1.5MW的Azipod吊舱式推进器,该吊舱式推进器是由ABB公司研制且是最早应用于船舶的吊舱式推进器。此后,德国Siemens公司和Schottel公司成功研制了Siemens-Schottel Propulsor(SSP)吊舱式推进器,法国Alstom和瑞典Kamewa公司合作研发了Mermaid吊舱式推进器,德国SAM和荷兰Wartsila公司合作研制了Dolphin吊舱式推进器。目前,这四种吊舱式推进器都有很多实船运营经验[5,6]。
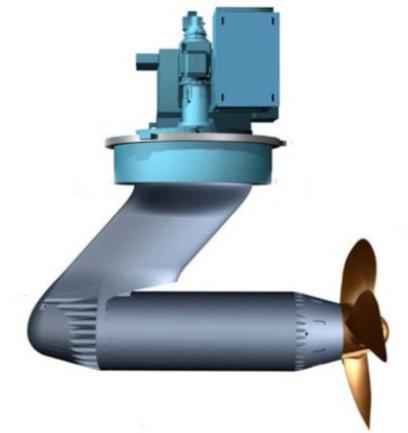 图1.1 ABB吊舱式推进器Azipod
图1.1 ABB吊舱式推进器Azipod
无轴轮缘推进器作为先进推进器代表之一,其具有推进效率高、振动噪声小、安全可靠、布置灵活等优势,引起了各个国家的广泛关注。美国、英国、荷兰、挪威等国家纷纷研制开发出无轴轮缘推进器相关产品。2003年,美国通用动力公司生产设计了89kW无轴轮缘推进器,并将其应用在一艘小型民用渔船上。2005年,英国Rols-Royc公司成功研制了800kW的无轴轮缘推进器(见图1.2),并将其成功应用于一艘小型近海军事支援船[7]。
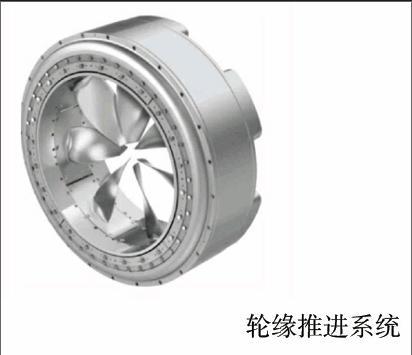 图1.2 无轴轮缘推进器
图1.2 无轴轮缘推进器
目前,我国船舶电力推进技术总体落后于发达国家,主要是由于我国电力推进相关技术研究起步较晚和我国制造业整体水平与国外发达国家还有一定差距。近几年,我国船舶电力推进系统相关研究发展较为迅猛,中船重工七一一研究所和七一二研究所在电力推进船领域都取得了较大的研究成果和工程应用成果。中国中车也开始将自身关于电力拖动领域的相关知识和丰富经验逐步应用于海洋工程领域。同时,武汉理工大学、海军工程大学、上海海事大学等船舶类院校也都纷纷设立了船舶电力推进实验室,攻克了许多船舶推进系统相关技术难题,获得了较多的研究成果。
2006年,烟大火车轮渡“中铁渤海1号”正式开通运营,该船是我国第一艘综合全电力推进系统滚装船,其配备了Azipod吊舱式推进器。在无轴轮缘推进器研制方面,国内海军工程大学马院士团队在无轴泵喷推进器技术的研发上,已经取得突破性进展,该推进器即将装配到某型核潜艇上。中船重工七〇二研究所也成功开发出无轴轮缘推进器的样机。
1.2.2 船舶推进系统控制策略国内外研究现状
船舶在一般海况作业时,由于螺旋桨浸水较深,基本没有螺旋桨出入海面的现象,这种海况可以使船舶平稳地作业,属于比较理想的海况。但是当船舶作业在恶劣海况时,螺旋桨可能会出现频繁进出海面的情况,从而导致螺旋桨负载瞬时变化,造成推进系统转速、转矩和功率剧烈振荡,严重时可能会导致系统机械机构损坏、全船失电等问题。此时若仍用一般海况下推进系统控制方法来操控船舶,将可能无法应对恶劣海况下随机的突发型干扰,会造成船舶危险事故。因此只有根据海况适时调整船舶推进系统控制策略,才能更好地保证船舶的稳定性和安全性。
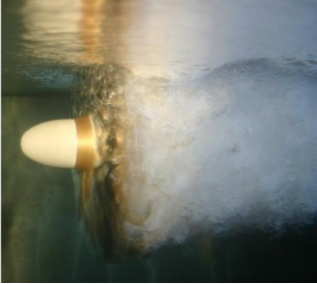
 目前,挪威科技大学(Norwegian University of Science and Technology, NTNU)的海洋控制实验室(Marine Cybernetics Laboratory, MC-Lab)对船舶推进系统相关控制策略进行了深入研究,如图1.3所示,该实验室分析了恶劣海况下船舶电力推进系统的动态变化,探讨了恶劣海况下船舶推进系统控制策略,并通过小比例的船池实验和仿真分析验证了所提出的控制策略的可行性,取得了相当多的研究成果[8,9]。
目前,挪威科技大学(Norwegian University of Science and Technology, NTNU)的海洋控制实验室(Marine Cybernetics Laboratory, MC-Lab)对船舶推进系统相关控制策略进行了深入研究,如图1.3所示,该实验室分析了恶劣海况下船舶电力推进系统的动态变化,探讨了恶劣海况下船舶推进系统控制策略,并通过小比例的船池实验和仿真分析验证了所提出的控制策略的可行性,取得了相当多的研究成果[8,9]。
图1.3 NTNU海洋控制实验室螺旋桨出入水实验
在国内,武汉理工大学、哈尔滨工业大学、上海交通大学等院校也都深入进行了恶劣海况下船舶推进系统相关控制策略的研究,武汉理工大学杨江、吴明学者分析了吊舱式电力推进器在风浪流影响下的运行状态[10,11],国防科技大学的高富东学者探讨了水下航行器在复杂海况下的关键技术[12],上海交通大学的颜瓅学者研究了不同海况下船舶的运动状态[13]。对于复杂海况下船舶推进系统控制策略的研究,由于涉及到机械磨损、整船能量消耗、系统鲁棒性等问题的优化,目前只有较少的文献关注于复杂海况下船舶推进系统控制策略的研究。
1.3研究内容及章节安排
本文利用NTNU MC-Lab的实验相关数据和电力推进系统相关数据,基于Matlab/Simulink仿真软件搭建船舶电力推进系统仿真模型,深入研究一般海况和恶劣海况下船舶推进系统控制策略。本文的章节安排如下:
1)第1章绪论介绍了本课题的研究背景及意义,并阐述了船舶电力推进系统和船舶推进系统控制策略的国内外研究现状。
2)第2章分析了船舶在行驶中受到的阻力及其算法,在其推进系数中各种因素的影响及其影响程度进行了分析,且对螺旋桨水动力进行了分析,为船舶在恶劣海况下控制提供了基础理论。
3)第3章探讨了一般海况下转速控制策略、转矩控制策略及功率控制策略的特性,提出转速、转矩和功率控制策略方案,为在恶劣海况控制策略方案奠定了基础。
4)第4章介绍了恶劣海况下船舶推进系统控制策略的目标及原理,提出了带动态限速模块的抗过旋控制策略(抗过旋控制策略#1)和带卷气识别模块的抗过旋控制策略(抗过旋控制策略#2),并在抗过旋控制策略#2中提出2种卷气效应识别器。
5)第5章对全文进行归纳和总结,并提出论文不足之处与后续展望。
第2章 船舶推进系统阻力及损失分析
2.1 引言
螺旋桨作为船舶推进系统的重要组成部分,一般装在艉部,与船体之间相互作用。螺旋桨的转动会影响船体周围的流场,同时船体造成的尾流对螺旋桨
也将产生干扰。这种现象使得船桨系统在实际运行时和理论分析有一定的区别。
在本章的讨论中,先把螺旋桨和船体作为孤立的系统,再研究两者之间的相互影响[14]。船舶航行时,将受到水的阻力,同时,水面上的建筑还将受到风的影响。那在本文在建模中,不考虑风对船舶上层建筑的影响,也对风的干扰无法进行仿真计算,因此仅研究浪流对船舶运动的影响。
在恶劣海况下,由于船舶的周期性运动及浪流的作用,螺旋桨将发生卷气效
应,导致螺旋桨推力和转矩的损失,本章将对恶劣海况下的螺旋桨水动力损失进行分析。
2.2 船舶阻力
船舶阻力可由两部分组成,一是船舶在无流场的水域中所受的裸船体阻力;二是由外界干扰形成的附体阻力。低速商船在常规海况下航行时,空气阻力通常只占总阻力的 2%-3%,因此不考虑风浪的情况下,裸船体阻力占据了总阻力的很大比例。为便于叙述,下文的“船体阻力”均指“裸船体阻力”。
按产生原因,船体阻力可分为粘压阻力、兴波阻力和摩擦阻力。常规工况下,对于低速航行的船舶,摩擦阻力可占到船舶阻力的 3/4,粘压阻力和兴波阻力在船舶阻力中比例较小;然而对于高速船舶,粘压阻力较小,船舶阻力主要是由摩擦阻力和兴波阻力组成,二者所占比例相差不大。将粘压阻力与兴波阻力相加,便得到剩余阻力 ,因此船体阻力可用式(2-1)表示:
(2-1)
2.1.1 摩擦阻力的计算
船体摩擦阻力的大小可由式(2-2)得知
(2-2)
式中,为海水密度;为船舶航速;为船舶平板摩擦阻力系数;为船体粗糙程度补贴系数;为船舶湿表面积。
- 船体湿表面积
根据瓦格宁根船池所总结的湿表面积计算公式可得:
(2-3)
其中,是船舶柱间长,是排水体积。
- 摩擦阻力系数
雷诺数,其中L为船长,ν为海水粘性系数。根据经验公式求得摩擦阻力系数:
(2-4)
3)船体粗糙程度补贴系数
船体粗糙程度补贴系数取决于船长。荷兰试验池给出了与船长的关系,如表2.1所示:
表2.1 值随船长变化资料
船长(m) | 船长(m) | ||
50 | 0.350.4 | 260 | 0 |
150210 | 0.2 | 300350 | -0.1 |
210260 | 0.1 | 350450 | -0.25 |
2.1.2 剩余阻力的计算
船舶剩余阻力计算公式如下:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: