无人船的初步设计毕业论文
2020-02-19 09:03:29
摘 要
论文以无人船为课题背景,研究了无人船设计领域的一些基础性问题。主要从无人船全自动舱底泵的安装,无人船远程操控平台设计,无人船监视系统的实现原理三个方面展开。无人船全自动舱底泵的安装包括泵的工作原理解析、技术参数介绍、安装过程和后期维护等内容。无人船远程操控平台的设计包括遥控原理的简介,上位机源代码解析以及使用Visual Studio对源代码进行二次开发过程的阐述。第三部分无人船监视系统的实现,介绍了视频从下位机回传到上位机解码再现的过程。并就系统的拍照功能的实现做了代码分析。
经过研究,完成了全自动舱底泵安装并对无人船的遥控原理,上位机操控平台设计以及指令发送和监视原理有了较为深刻认知。按照毕业设计任务要求,独立自主完成了无人船上位机平台的二次开发。实船实验表明,电脑端发出的控制指令能够准确及时地传达到无人船,无人船能根据指令做出相应的动作。监视系统视频传输正常,拍照功能正常。达到了预期效果。
关键词:无人船;上位机平台;遥控
Abstract
This paper studies some basic problems in the field of unmanned surface vehicle design.Mainly about the automatic bilge pump installation of unmanned surface vehicle , remote control platform design of unmanned surface vehicle and unmanned surface vehicle monitoring system.The installation of automatic bilge pump of unmanned surface vehicle includes the analysis of working principle, introduction of technical parameters, installation process and later maintenance, etc.The design of the unmanned surface vehicle remote control platform includes the introduction of remote control principle, source code analysis of the host computer and the description of the secondary development process of the source code using Visual Studio.The third part implements the unmanned surface vehicle monitoring system, introduces the process of video returning from the slave computer to the host computer, and analyzes the code of the camera function.
The results show that:fully automatic bilge pump installed correctly,In accordance with the requirements of graduation project, I independently completed the secondary development of the unmanned surface vehicle host computer platform.The experiment shows that the control command from the computer terminal can be transmitted to the unmanned surface vehicle accurately and timely, and the unmanned ship can make corresponding actions according to the command.Monitor system video transmission is normal, normal photo function.The desired effect was achieved.
Key words:Unmanned surface vehicle;host computer platform;remote control
目录
第1章 绪论 1
1.1 课题研究背景和目的 1
1.2 国内外研究现状 1
1.3 主要研究内容和意义 2
1.4 论文写作安排 3
第2章 无人船自动泵的安装 4
2.1自动泵的工作原理 4
2.2自动泵结构和参数 5
2.2.1 自动泵的结构 5
2.2.2 自动泵技术参数 7
2.3 自动泵的安装 8
2.4 自动泵的调试与维护 9
2.4.1 自动泵的调试 9
2.4.2 自动泵的维护 10
2.5 本章小结 10
第3章 无人船遥控平台的设计 11
3.1 无人船遥控原理 11
3.2 上位机源代码介绍 11
3.3上位机用户界面设计 15
3.4 控制指令的产生和发送 18
3.5 上位机调试实验 20
3.6 本章小结 21
第4章 上位机监视功能的实现 22
4.1下位机的视频回传 22
4.2 拍照功能的实现 23
4.3 上位机的录像功能 23
4.4 本章小结 24
第5章 总结与展望 25
5.1 毕业设计总结 25
5.2 展望 25
致谢 26
参考文献 27
第1章 绪论
1.1 课题研究背景和目的
无人船(USV,Unmanned Surface Vehicle),也称无人驾驶船舶,以有动力可远程通信和操作的船舶为平台,搭载特殊的功能模块,执行相关的工作[1]。功能模块在远程控制下执行了既定的工作之后,将工作结果以数据资料或者影像资料的方式通过无线通讯系统回传给控制中心,或者按照既定的程序存储数据继续工作,从而实现船舶无人驾驶,无人代替有人实现相关工作。
早在第二次世界大战时期,盟军在诺曼底登陆时就曾采用无人船释放烟雾弹[2],当时无人船也被用来进行海域排雷。到后来的五六十年代,美国采用无人船在进行核试验后的放射性水域采集水样。近几十年随着信息技术和远程控制技术的发展,无人船在水文监测,环境勘察,海上特种作业,港口安全等领域扮演着越来越重要的角色。各国纷纷把目光投向无人船领域,开展相关研究和实验。
目前,无人船的研究主要还集中在军用领域,但是随着工业科技发展和社会经济进步,民用船舶行业对于经济性和安全性有了更高的要求。船舶正朝着智能化、机动化、无人化、网络化方向发展。和无人机的发展相比,民用无人船领域还处在初期开发阶段,全世界只有几十家公司有能力生产无人船,中国也仅有几家科技公司能生产无人船。随着国家振兴海洋经济战略的实施,整个无人船领域将面临一个广阔的发展前景,正是基于这种考虑,本课题从无人船的初步设计着手,通过查阅相关资料学习相关理论知识,试着设计一艘可以远程遥控的无人船舶,来探求无人船发展的难点和应用前景。
1.2 国内外研究现状
国外无人船目前以美国和以色列的最为先进,美国、以色列的无人船主要是军事用途[3],而其他国家发展的无人船大多为民用或科研用途,比如航运、海洋环境保护、航道测量等。欧洲也有很多科研机构从事无人船的研发,日本在无人船研究领域也有投入。以下列出在无人船发展过程中比较著名的项目和有代表性的船舶(表1.1)。
国内无人船的研究起步较晚,目前市场上还没有集驾驶、遥控、自主航行等功能于一体的水面无人船。研究人员要根据无人船的任务需求、船体特征以及总体布局,还要考虑船舶系统功能、经济成本等因素,设计并构建无人船系统。国内也有一批从事无人船研究设计的院所和公司。其中以哈尔滨工程大学、上海大学、武汉理工大学、上海海事大学等高校,中国航天科工集团、沈阳新光公司、珠海云州智能公司、沈阳自动化研究所等单位为代表。这些院校和公司在国内无人船的研究和设计上已经迈出了实质性的步伐。
表1.1 国外著名的无人船
国 家 | 船 名 | 研制部门 | 年份 | 核 心 科 技 |
美 国 | Spartan Scout | 美国海军 | 2002 | 摇杆操纵和自主模式,反潜反水雷,情报收集,侦察 |
日 本 | Kan- Chan | 雅马哈公司 | 2003 | 水喷射动力、长续航远洋航行、海洋监测 |
英 国 | Springer | 英国普利茅斯大学 | 2004 | 双体船、环境监测、直流电机驱动、SLAM技术 |
以色列 | Silver Marlin | 埃尔比特系统公司 | 2006 | 自动避障、高速、固定式遥控武器、海用光电设备 |
美 国 | Sea Hunter | 美国海军 | 2016 | 远程控制、自动驾驶、自动避障、搭载先进光学设备 |
以色列 | Sea knight | 以色列海军 | 2017 | 长续航惯性控制、水面搜索雷达光电观察、激光测距 |
2017年12月5日,中船集团中国首艘智能船38800吨的“大智”号交付仪式代表着船舶行业正在向无人船的大变革时代迈进[4]。
2018年6月28日在深圳举办的“2018船舶和海工装备新技术深圳国际论坛”上,云航智能技术有限公司联合创始人介绍了国际上最新的无人船无人艇进展、国际智能船、智能航运动态和他们公司开发的筋斗云无人船以及筋斗云无人船的当前货运机会。云航正在研发沿海岛间货物运输无人船,该船长约50米,航速9节,续航50海里,船员2 0,即在航行过程中不需要人员上船,在靠泊的时候安排2人进行协助。该船主要用于万山群岛的陆岛货运[5]。
2019年2月25日,世界移动通信大会在西班牙巴塞罗那开幕。第五代移动通信技术(5G)成为本届大会最热门话题。会上,云洲智能携手爱立信、中国移动打造的最新5G无人船也在大会上亮相。[6]
1.3 主要研究内容和意义
研究内容包括:
(1)学习遥控原理。学习遥控系统理论知识,并进行分析比较,设计一个可操作性强易实现的技术方案。
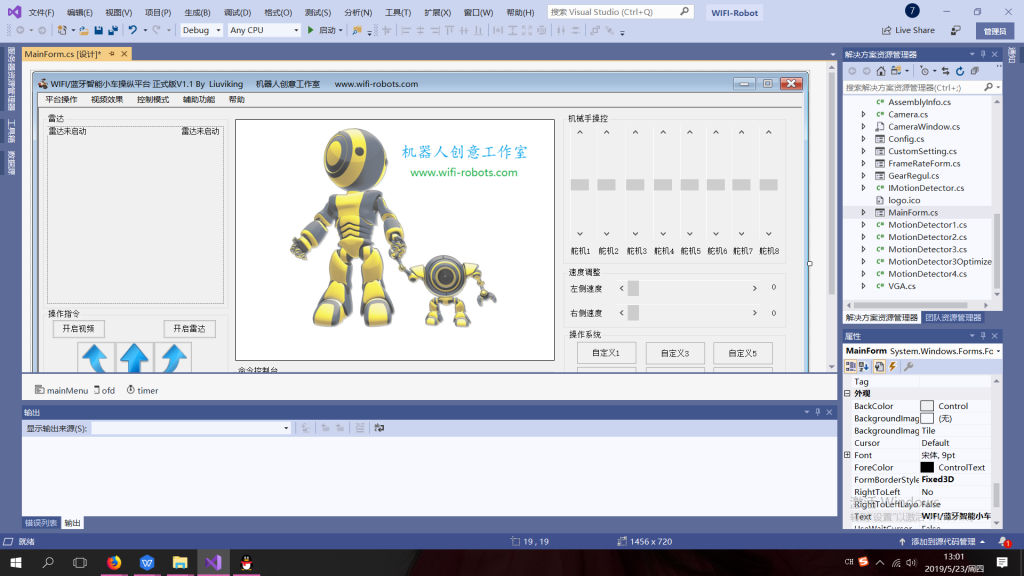
(2)学习Visual Studio等软件,设计简单的PC端无人船遥控系统上位机操作平台。实现无人船远程控制和视频监视功能。
(3)通过调试实验,验证上位机平台的有效性并解决一系列控制系统相关问题。
意义:无人船初步设计旨在探求无人船发展的前景和难点,通过把国内外一些成熟的典型无人船产品放在一起比较,可以明显感觉到无人船的复杂程度正在由易到难,随着信息科技的发展和进步,以及人工智能的出现,未来无人船将更加无人化、大型化、智能化。无人船可以更好地保证船舶的航行安全和效率,尽可能减少人为因素造成的事故,有很好的经济效益和社会效益[7]。无人船的自主控制与远程控制相结合,在不久的将来,无人船将可以做的更大,可靠性更高。从宏观上讲,无人驾驶船给航运带来的影响,就像智能手机给通讯行业带来的颠覆性的改变,在无人船技术和相关的法规等问题都克服之后,无人船将给海事带来变革,彻底改变船舶设计和运营的格局[8]。
1.4 论文写作安排
第1章 主要论述了无人船初步设计的课题研究背景和目的,并介绍了国内外无人船设计领域的研究现状,就本次课题研究的内容和意义做了基本阐述。
第2章 介绍了无人船自动泵的安装。对自动泵的作用、参数、工作原理、安装过程做了说明。
第3章 就无人船PC端操作平台的的控制部分的设计工作做了阐述。
第4章 介绍了无人船上位机平台视频监视以及拍照和录像的实现原理和过程。
第5章 对本次毕业设计的不足之处做了总结,提出设计的无人船遥控系统存在的弊端与有待改进的方面。并结合已有的基础和相关知识,对无人船设计的后续工作做出了展望。
第2章 无人船自动泵的安装
2.1自动泵的工作原理
全自动舱底水泵由舱底水泵和浮动开关组成,浮动开关可以根据感知到的液位情况控制舱底水泵的开启或者关闭,本次毕业设计用到的是12V直流电源驱动的全自动舱底水泵。以此为例,下面介绍一下全自动舱底水泵的工作原理:
如图 2.1所示,全自动舱底水泵有三根引线接出,分别为黑色线、棕色线、棕白色线,其中黑色线接12V/24V直流电源负极,棕色线接三路开关的的手动控制接线柱,棕白色线接三路开关的自动控制接线柱,并且三路开关的off接线柱要通过符合安全要求的保险丝再与直流电源的正极相连,这样当泵超负荷运行或者线路短路的时候,保险丝可以起到保护泵和电路的作用。实船安装的全自动舱底水泵,泵的黑色出线与直流电源的负极直接相连,泵的棕色线接驾驶室的舱底水泵开关,再通过保险丝与直流电源的正极相连。自动泵的棕白色出线直接通过保险丝与直流电源的正极相连。这样当船舱内因为降雨等状况而产生积水时,自动泵浮动开关的浮球上浮,自动控制电路接通,自动泵开始工作。当水位降低到浮球无法上浮足够高度,电路无法接通时,自动泵停止工作。整个过程不需要人的参与,完全由浮动开关控制自动泵的启停。在驾驶室有人的情况下,也可以手动打开舱底水泵开关,使其电路接通,舱底水泵开始排水作业[9]。
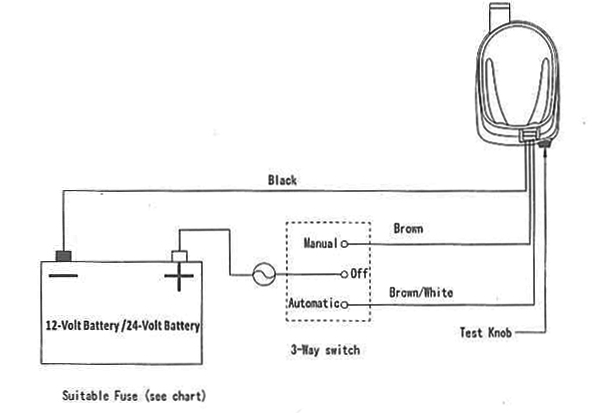
图2.1 自动泵接线图
图2.1中的Test Knob为测试旋钮,在安装泵的过程中会用到,其原理是当旋转旋钮时,会模仿出泵在被水浸没时水带给浮动开关浮球的力,如果在泵处于干燥状态下,接通自动控制电路,拨动旋钮,泵能正常工作,则说明泵的自动控制电路接线没有问题。当切断自动控制电路接通手动控制电路后,再拨动旋钮,此时如果开启驾驶室的舱底水泵开关,水泵仍然能正常工作,说明手动控制线路的接线正确。这样做的必要性在于,如果舱底水泵的一条控制线路在出现意外情况下停止工作,要确保另外一条控制线路仍然能使舱底水泵正常工作[10]。
2.2自动泵结构和参数
本次安装的为全自动舱底排水泵,由厦门汇力源进出口有限公司(SEAFLO)生产,考虑到本次毕业设计中无人船的尺寸和泵的经济性等因素,选购了型号为SFBP1-G1100-06的全自动舱底排水泵。
2.2.1 自动泵的结构
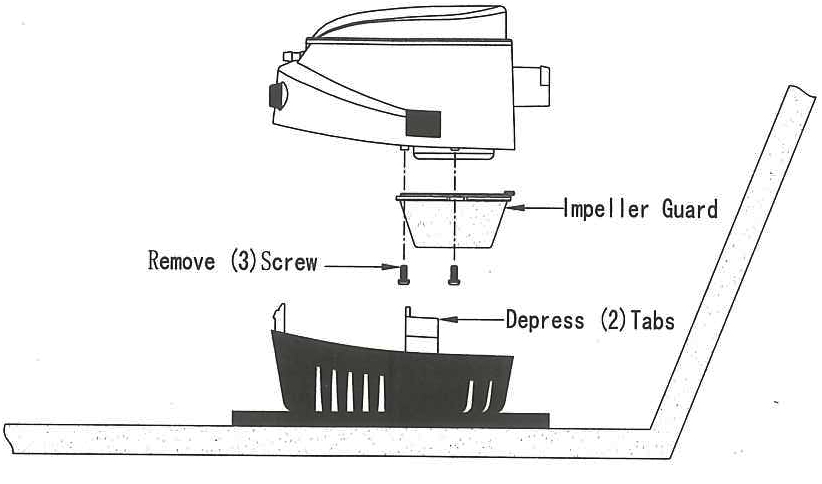
SEAFLO自动舱底排水泵由一台叶轮泵和一个非汞浮动开关组成。当水位上升时,浮动开关的浮球升起,与泵相连的自动控制电路接通,泵就开始工作,实现了全自动智能排水。泵的外观如图2.2,泵的结构组件如图2.3所示。
![@TWY_)NVU]88@FHEZL]G8AS](http://www.biyelunwen.org/wp-content/uploads/2020/02/lw1943_202021993276.png)
图2.2 自动泵的外观
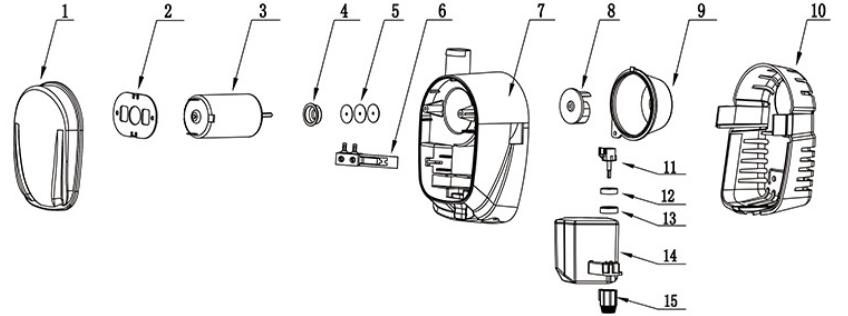
图2.3 自动泵的组件
各部件名称如表2.1 所列
表2.1 自动泵组件
序 号 | 组 件 名 称 | 数 量 |
1 | 上盖 | 1 |
2 | 电机固定支架 | 1 |
3 | 电机 | 1 |
4 | 电机固定座 | 1 |
5 | 平垫片 | 1 |
6 | 开关组件 | 1 |
7 | 泵体 | 1 |
8 | 叶轮 | 1 |
9 | 叶轮罩 | 1 |
10 | 过滤网 | 1 |
11 | 转子 | 1 |
12 | 泵体外壳 | 1 |
13 | 油封座 | 1 |
14 | 浮球 | 1 |
15 | 旋钮 | 1 |
由图2.3和表2.1可知,将零件组装起来之后会得到完整的自动泵如图2.2。从泵中引出的三根线,黑色线直接与泵内的直流电机相连,棕色线和棕白色线与浮球开关相连,浮球开关再通过导线与直流电机的另外一个接线柱相连,其中需要注意的是,泵内电机的转向问题,根据泵的流道设计情况来接线,使得泵的排水方向符合流道阻力最小,可以确保泵在工作时有一个较高效率[11]。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:


![SM[WS[)%`]$55HLL0@E%D$S](http://www.biyelunwen.org/wp-content/uploads/2020/02/lw1943_20202199327132.png)