主动隔振系统FxLMS控制算法研究毕业论文
2021-03-15 20:01:26
摘 要
随着现代技术的快速发展,被动隔振在某些领域已表现出了一定的局限性,在这些领域主动隔振技术逐渐成为了研究热点。本文主要研究了主动隔振技术的算法控制。隔振的主动控制是通过次级通道产生的反向作用力来抑制振动,运用较多的控制算法是FxLMS自适应算法。本文在simulink中设计了振动主动控制的仿真系统结构和FxLMS模块,并基于simulink对主动隔振系统中进行了仿真分析,在保证系统稳定的前提下改变系统内部参数来研究其对算法性能和控制效果的影响。
研究结果表明:FxLMS算法对主动隔振系统的控制效果良好,在保证系统稳定的前提下,适当的调节阶数和步长能取得更好的控制效果。
关键词:主动隔振;振动主动控制;FxLMS算法;simulink仿真
Abstract
With the rapid development of modern technology, passive vibration isolation in some areas has shown some limitations in these areas active vibration isolation technology has become a research focus. This paper mainly studies the algorithm control of active vibration isolation technology. The active control of vibration isolation is the reverse force generated by the secondary channel to suppress the vibration, and the more control algorithm is FxLMS adaptive algorithm. The simulation system structure and FxLMS module of vibration active control are designed in simulink. Simulink is used to simulate the active vibration isolation system. The internal parameters of the system are changed under the premise of ensuring the stability of the system to study the influence of the algorithm performance and control effect
The results show that the FxLMS algorithm has good control effect on the active vibration isolation system. In the case of ensuring the convergence of the system, the appropriate adjustment order and step length can improve the control effect.
Key Words:active vibration isolation;active vibration control;FxLMS algorithm;Simulink simulation
目录
第1章 绪论 1
1.1 课题研究的背景、目的及意义 1
1.2 主动隔振技术的国内外研究现状 3
1.3 论文的研究内容和结构 4
1.3.1 论文的研究内容 4
1.3.2 论文结构 4
第2章 主动隔振系统简述 5
2.1 主动隔振系统的组成和分类 5
2.2 主动隔振系统的工作原理 6
2.2.1 作动器 6
2.2.2 控制策略 7
2.3 隔振性能分析 8
2.4 本章小结 10
第3章 FxLMS算法 11
3.1 LMS算法 11
3.2 FxLMS算法结构 12
3.2.1 算法的基本结构 12
3.2.2 算法的推导过程 12
3.3 本章小结 15
第4章 主动隔振系统的仿真分析 16
4.1 仿真分析 16
4.2 算法性能分析 18
4.3 本章小结 20
第5章 总结与展望 21
5.1 论文总结 21
5.2 未来展望 21
参考文献 22
致 谢 23
第1章 绪论
1.1 课题研究的背景、目的及意义
随着现代科学技术的高速发展,诸多场合对振动环境的要求越来越高,人们在现代生产、生活中愈来愈重视振动控制技术,且取得了大量的理论研究成果。振动控制是振动工程领域内的一个重要研究点,它是使用消振、隔振、阻尼、吸振等手段来减轻机器设备或工程结构的振动。根据是否需要外界能源,振动控制可以分为被动控制和主动控制。
被动控制具有结构简单、造价低、易于维护且无需外界能源等优点,在许多场合下减振效果好,在诸多工程领域中已获得广泛地应用。但随着现代科学技术的高速发展,一些高精度设备和特定的场合对振动环境和结构振动特性提出了越来越高的要求。振动被动控制暴露出来了低频控制效果差、不能适应外界振动特性变化等缺点,在某些工程领域已表现出了一定的局限性。振动主动控制是指传感器检测到初始信号,控制器根据初始信号采用一定的控制策略,实时计算得到控制量,再根据控制量驱动作动器施加一定的作用在被控对象上,以抑制结构或系统的振动[1]。主动控制技术具有控制效果好,适应性强等优点,现在已成为了振动控制的研究热点。
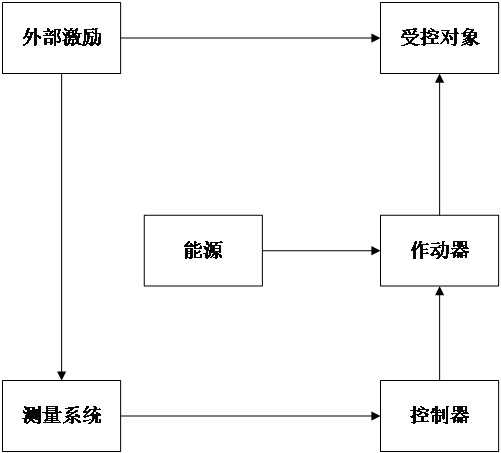
振动主动控制系统的形式多种多样,但任何一个完整的控制系统的组成都包括检测振动的传感器、对传感器检测到的信号进行控制的控制器和对系统机械响应施加影响的作动器。根据测量系统的位置,振动主动控制系统可分为前馈控制和反馈控制[2]。前馈控制系统是测量系统直接测量参考信号,将测量信号传给控制器,再驱动作动器施加作用在受控对象上。在干扰发生后被控量还没显现变化之前,控制器就产生输出信号起到了控制作用,即从传感器测到信号再到控制器产生作用的时间比干扰信号直接传到被控对象的时间短。其结构如图1.1所示。前馈系统的重点是要在被控量收到干扰信号前获取到参考信号,使系统的被控量对扰动完全不灵敏,这样才能完全实现对扰动的补偿。对于周期性干扰,这类信号有规律可循,获得参考信号相对较易。对于非周期性和随机干扰,获得干扰信号相对较难,所以有必要引入干扰预估测定来产生合适的抵消干扰,这样才能获得满意的参考信号。反馈控制系统是外部激励直接作用于被控对象,传感器再检测受控对象的输出,检测到的信号经过适调和放大等处理后传到控制器,控制器按一定的控制规律产生相应的控制信号,使作动器反过来对系统或结构施加力或力矩,其结构如图1.2所示。与前馈系统通过测量干扰信号获得控制信号不同的是,反馈控制系统通过比较系统输出和期望之间的偏差来获得控制信号,反馈控制系统在迭代过程中减小系统输出量和参考输入量的偏差,最终获得需要的控制输出。