独立VSCF船用轴带发电机无刷双馈电机控制设计外文翻译资料
2022-01-06 21:57:53
英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
独立VSCF船用轴带发电机无刷双馈电机控制设计
华中科技大学机械科学与工程学院,
武汉,中国
摘要
提出了一种基于无刷双馈电机(BDFM)的独立变速恒频(VSCF)船舶轴带发电机系统。该系统利用精心设计的电流矢量控制器对控制绕组(CW)电流进行调节,使BDFM的输出电压幅值和频率在转子转速和负载变化的情况下保持恒定。提出了控制方案,并对控制系统进行了硬件设计。在325 TEU集装箱船上进行了试验,试验结果表明,连续波电流矢量控制器和整个控制系统具有良好的动态性能。并对发电机系统进行了输出电压谐波分析和燃油消耗分析。最后,给出了不同转子转速和负载条件下发电机系统的总效率。
关键词:无刷双馈电机,控制方案,动态性能,硬件设计,节能性能,船用轴带发电机
- 介绍
近年来,为降低船舶的能源消耗,船舶发电系统的燃油经济性表现已成为航运企业关注的焦点。船舶轴带发电系统具有良好的节能性能,正成为研究热点。为保证船舶安全,船舶主机一般有10%~15%的功率冗余。船舶主发动机驱动螺旋桨时,船轴发电系统可以通过将发电机与主发动机耦合,利用主发动机的冗余功率发电。因此,一个船舶轴带发电机系统可以提高主机效率,降低燃油消耗。
目前,船舶轴发电系统主要有三种类型。第一种采用同步发电机和电力电子转换器要求与发电机[1]、[2]额定功率相同。这意味着系统成本非常高。第二种是基于双馈感应电机(DFIM),变换器仅向DFIM[3]、[4]转子提供滑差功率。该系统降低了变换器的额定功率,大大降低了系统的成本。然而,DFIMs具有电刷和滑环,增加了发电机的维护成本。第三种是基于无刷双馈电机(BDFM)的无刷双馈电机,是一种具有替代DFIM[5]、[6]潜力的新型电机。因为BDFMs没有刷子或滑环,所以它们更多比DFIGs简单可靠。
BDFM的定子包含两个不同磁极数的独立绕组(称为功率绕组,PW和控制绕组,CW)。因此,BDFMs避免了两个绕组之间的直接耦合。特别设计的转子允许两个定子绕组之间的间接耦合。
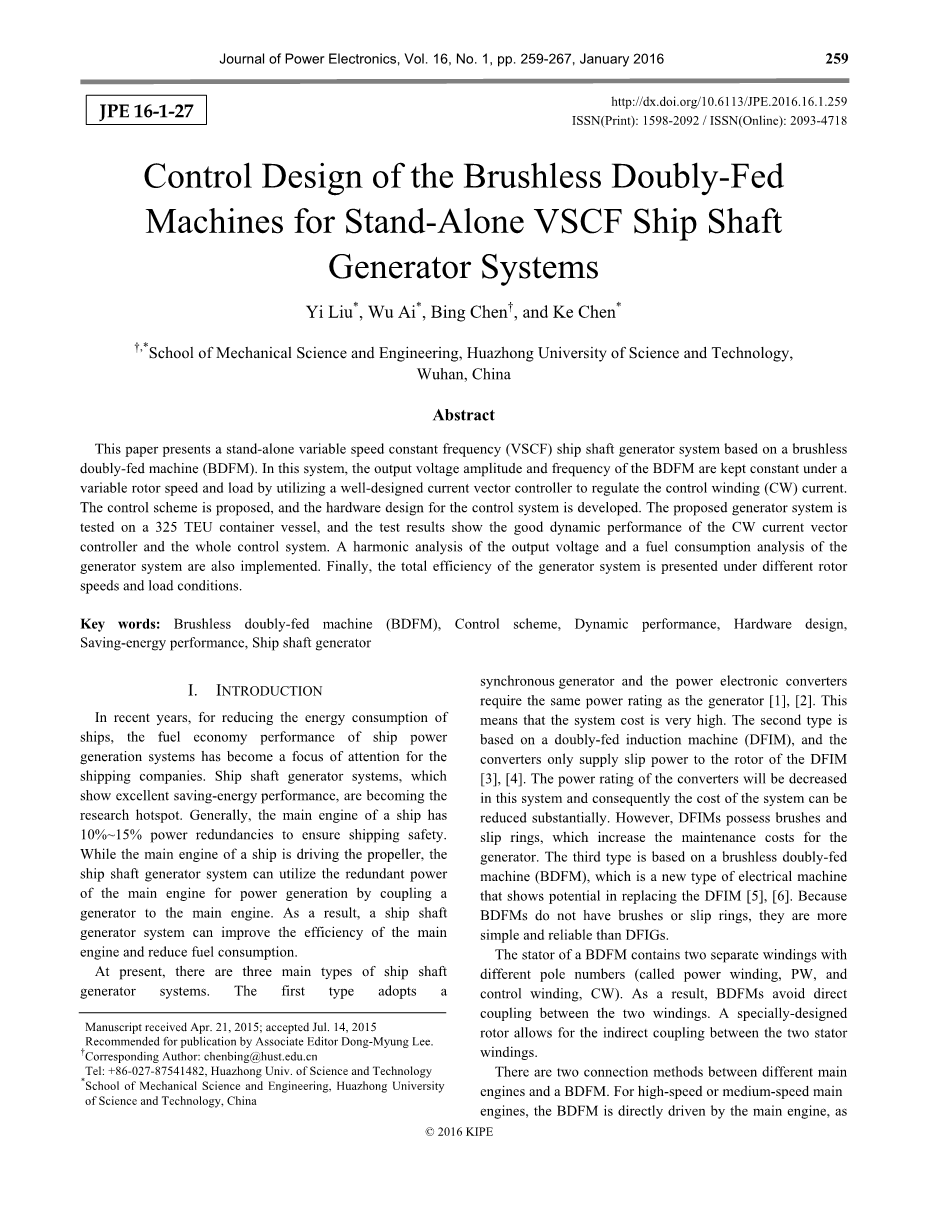
不同的主机与BDFM之间有两种连接方式。对于高速或中速主机,BDFM直接由主机驱动,如图1(a)所示。对于低速主机,BDFM是通过一个变速齿轮箱的连接来驱动的,如图1(b)所示。
针对BDFMs的变速驱动应用,提出了许多控制策略,如相角控制[7]、间接状态量控制[8]和直接转矩控制[9]。本文还研究了并网风力发电机组中BDFMs的一些控制策略,如S. Shao等人提出的stato -flux定向矢量控制。
一般来说,并网发电系统控制发电机的有功功率和无功功率。然而,在独立的发电机系统中,发电机输出电压的幅值和频率应在转速或负荷变化时保持稳定。因此,并网发电机组的BDFMs控制方案并不直接适用于独立的VSCF发电系统。对于独立的发电应用程序,可以进行一些控制开发了基于DFIMs的[13]-[16]系统。然而,目前还没有关于BDFM在独立生成系统中的应用的研究。
本文介绍了一种基于BDFM的独立VSCF船轴发电机系统。该系统在长江航运集团325 TEU集装箱船舶上进行了测试。试验结果验证了所提出的独立VSCF船用轴带发电机系统具有良好的动态性能。此外,还对不同转子转速和负载条件下发电机系统的输出电压、燃油消耗和总效率进行了谐波分析。
二、BDFM的基本工作原理
BDFM可以在多种模式下工作,包括同步模式、级联模式和感应模式[5]。同步模式,也称为双馈模式,是最优模式。在此模式下,转子转速可以表示为:
(1)
其中p 是电偶,对于下标1、2和r分别表示PW、CW和转子的角频率。
当是0, 转子以所谓的同步转速旋转。转子速度高于称为超同步速度, 转子速度低于称为次同步速度。当转子速度变化, 持续保持, 应随转子转速的变化而变化。, 并从表达式(1)可推导出的表达式:
(2)
如果忽略定子和转子的铜损耗,则PW和CW有功功率P1和P2的关系为[5]:
(3)
当BDFM在独立的VSCF发电机系统中使用时,PW总是输出功率。然而,在次同步运行中,CW会从PW中吸收能量,因为表达式(2)中是负的。根据表达式(3),PW和CW的能量流动方向是相反的。同理,超同步运行时,CW将输出功率给负载。
(a) BDFM连接高速或中速主机。
(b)低速主机BDFM连接。
图1、不同转速发动机与BDFM的连接方式。
- 控制方案设计
- 控制绕组电流矢量控制
缠绕转子的BDFM动态矢量模型表示为[6]、[10]:
(4)
(5)
(6)
(7)
(8)
(9)
其中,u,i,和psi;是电压、电流、流量;
R和L为电阻和自感;下标的1、2、r表示PW、CW、转子;L1r和L2r是定子绕组与电机之间的耦合电感转子;Wa是dq参考帧的角速度。
提出的连续波电流矢量控制器是基于连续波电流矢量方向。这意味着在表达式(4), (6), 和 (8) 应该设置为。表达式可以由表达式(2)导出。如果表达式(8)-(9)分为dq组件,带有转子电压u=0,那么:
(10)
(11)
(12)
(13)
其中s是微分算子d/dt。
将方程(12)(13)代入方程(10)-(11),得:
(14)
(15)
方程(14)的第一项可以写成:
这一项的零点和极限非常接近。所以它们可以相互抵消。然后方程(14)的第一项可以化简为.
在方程(14)的第二项的分母上所占比例较小,可以忽略不计。所以,式(14)中的第二项可简化为:
因此,方程(14)化简为:
(16)
同样的,方程(15)可以化简为:
(17)
考虑到,分解方程(6)-(7)可得:
(18)
(19)
(20)
(21)
将方程(16)-(17)代入方程(18)-(21)得:
(22)
(23)
其中:
其中是CW的泄漏常数。和表示和间的直接关系;和为PW与CW的交叉耦合,可视为随转子角速度变化的低频扰动。图2显示了连续波电流矢量的控制回路。
图2. 连续波电流矢量的控制回路。
B.总体控制方案
总体控制方案如图3所示,主要包括PW电压幅值控制、CW电流矢量控制、CW电流参考频率计算和实际PW电压幅值计算。
在PW电压幅值控制中,采用PI调节器对连续波电流幅值进行调节,使PW电压幅值在变转速和负载条件下保持恒定。PW电压幅值控制中的限幅块保证连续波电流指令不超过其额定值。在CW电流矢量控制中,CW电流q分量的参考值为零。这意味着CW电流d分量的参考值等于CW电流幅值参考值。CW电流矢量角获得通过一个集成的参考价值 CW当前角频率, 通过当前CW基准频率计算得到。最后,连续波电流矢量控制器可以在连续波中产生频率和幅值相对应的励磁电流。实际PW电压幅值是通过三相静态坐标到两相静态坐标的转换得到的。采用低通滤波器消除了PW电压幅值上的纹波。
- 硬件设计
- BDFM设计
为独立的VSCF船用轴带发电机系统,特别设计了一台带缠绕转子的60kw BDFM。转子绕组(RW)的设计利用了齿谐波和正弦绕组[17]的原理。RW由双层不等匝线圈构成,使一组三相对称绕组中的磁动势空间矢量主要包含两个不同磁极对的基本正弦磁场。与相同尺寸的网环笼式转子相比,转子谐波和基准转子泄漏电抗明显降低。此外,该BDFM的优化速度范围为375~700 r/min,这与325 TEU集装箱船的主机速度范围相匹配。BDFM中PW和CW的极对数分别为4和2。此外,在PW频率为50 Hz时,自然同步速度为500 r/min。表一列出了BDFM的详细参数。
表一、60千瓦BDFM规格
|
参数 |
值 |
参数 |
值 |
|
框架尺寸 |
Y315 |
定子外直径 |
520mm |
|
PW极对数 |
4 |
定子内直径 |
39.mm |
|
CW极对数 |
2 |
转子外直径 |
388.4mm |
|
自然同步转速 |
500 r/min |
定子齿宽 |
6.00mm |
|
速度范围 |
375~700r/min |
转子齿宽 |
8.4mm |
|
PW额定电压 |
400V |
轴直径 |
100mm |
|
PW额定电流 |
92A |
堆叠厚度 |
455mm |
|
PW频率 |
50Hz |
定子槽 |
72 |
|
CW电压范围 |
0-320V |
转子槽 |
54 |
|
CW电流范围 |
0-150A |
L1 |
0.2238H |
|
CW频率范围 |
-12.5-20Hz |
L1 |
0.2457H |
|
R1 |
1.43 Ω |
|
0.0216H |
|
R2 |
0.86 Ω |
|
0.0637H |
|
R3 |
0.112 Ω |
|
0.1228H |
B.控制电路设计
控制电路结构如图4所示。该船的主发动机直接驱动BDFM的转子。连续波侧变换器(CSC)为连续波提供频率可变的励磁电流。主动前端(AFE)(来自德国有限公司ARADEX)的主要功能是(a)稳定直流母线电压的定位点;(b)吸收了PW电力供应的连续波次同步速度;(c)反馈的连续波功率PW super-synchronous的速度;(d)维护统一AFE交流侧的功率因数。八个薄膜电容器并联在直流母线上,每个电容器的电容为4000uF,额定直流电压为800V。由于直流母线电容在独立BDFM系统启动前是不充电的,CSC无法运行或向CW提供励磁电流。因此,需要在系统中加入初始充电电路对直流母线电容进行预充电。初始充电电路中的限流电阻保证充电电流不会过大。此外,系统中还安装了直流撬棍装置,以防止在发生故障时过高的直流母线电压损坏电源设备或电容器
PW和直流母线的电压由LEM LV 100传感器测量,CW电流由LEM LT 208-S7/SP1传感器测量。转子位置由增量编码器(P F 公司的RHI90)测量,分辨率为1024 cycles/r。控制器板采用ARM(飞思卡尔MK60FN1M0VLQ12)和FPGA (Altera Cyclone IV)设计,控制器板上采用同步采样ADC芯片(AD7606)对电压和电流信号进行采样。控制器板向CSC输出PWM信号,调节连续波电流的幅值和频率。AFE由控制器板通过CAN总线通信进行控制。触摸屏作为人机界面(HMI),用于输入命令和显示系统状态信息。
图三、总体控
全文共7313字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[1995]



