多功能船混合动力的并联控制外文翻译资料
2022-08-23 15:31:52

英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
多功能船混合动力的并联控制
- D. Geertsma ;R. R. Negenborn;K. Visser; J. J. Hopman
赫兰兹国防学院,1780年,加利福尼亚·登·海尔德,
荷兰(电子邮件:r.d.geertsma@tudelft.nl)。
代尔夫特工业大学,荷兰代尔夫特2628CD
摘要:多功能船,特别是海军舰船,需要减少油耗同时保持机动性。混合动力推进系统,主要驱动柴油发动机和电动发动机并行驱动可以实现这一点。但是,需要开发并行控制策略。在在本文中,我们使用混合动力系统的仿真模型来研究两个平行多功能船上柴油机械和电力推进的控制策略。为了案例研究护卫舰,当使用两个4时,并行控制可以使船顶速度提高3 kts兆瓦电驱动器和两个10兆瓦主柴油机,与同一个基准混合动力车相比推进,无需并行控制。带电动扭矩的柴油机转速控制控制策略将船舶加速率提高了17%,并降低了平均发动机热量负载为150K。此外,带柴油机扭矩控制的电驱动速度控制
该策略可以将加速度提高40%,同时消除由于热负荷引起的波动到大洋,并且还将发动机的平均热负荷降低150K。未来的组合自适应变桨控制和最优电动驱动速度控制策略的比较动力分配策略可能会进一步提高混合动力推进装置的性能。
关键词:船舶系统船舶系统中的控制架构非线性和最优船舶系统控制,发动机建模和控制,混合动力和替代驱动车辆,发电厂的动态交互,控制系统设计,能源系统。
1.引言
电动推进器已经引起了人们的极大兴趣90年代的游轮业(Vie,1998),因为允许匹配连接的发电量船舶的总功率需求。从那时起,电动推进也已成功应用于渡轮中DP钻井船,电缆层,破冰船,拖船,海军船只,甚至在海军作战人员中(Moreno and
Pigazo,2007年; Hodge和Mattick,2008年; Loyd等,
- 。但是,发电机,变压器,变频器和电力机器导致满负荷时推进效率低下。因此,电力推进仅应用于船舶具有广泛的经营范围和重要的自由负载与推进负载的比例。
可替代地,混合动力推进实现了高效率直接驱动柴油发动机或燃气轮机时速度,同时允许选择类似的灵活性电力推进发电量和低船速下的自由负载(Geertsma等,2017)。此概念特别适用于一些工作模式需要很大的推进负载,在其他运行模式下需要一个该项目的“ ShipDrive:A”部分支持荷兰技术的混合船系统(项目13276)的集成建模,控制和优化的新方法STW基金会和荷兰皇家海军。
与船舶服务的等级相同(de Waard,2015)。例如,混合动力已经应用于海军护卫舰和驱逐舰(Castles和Bendre,2009年),
牵引船(Breijs和Amam,2016年),近海船(Barcellos,2013年)和游艇(van Loon和van Zon,2016)。
在目前大多数混合动力的应用中,船舶以直接机械模式或以
电气模式。这些应用程序尚未实现混合动力概念的全部潜力。第一,
当主机运转时,电驱动器可以非常有效地产生电力,而柴油因此可以关闭发电机。其次,电马达可以辅助主柴油机,例如提高加速性能,减少热负荷主机或提高最高速度。但是,要运行主机和电驱动并联,先进控制策略是必需的。
主机和电驱动的并行控制几乎没有研究过日期(Geertsma等人,2017; Sul ligoi等人,2012; Topaloglou等人,2016)。 Sulligoi等。(2012)研究了运行轴带发电机驱动由FREMM护卫舰的主要燃气轮机提供。然而,他们的研究集中在并行速度和电压降控制电驱动和柴油发电机。因为燃气轮机主传动操作范围很广是推进动力对轴带发电机的相对较小的动力不敏感的原因。
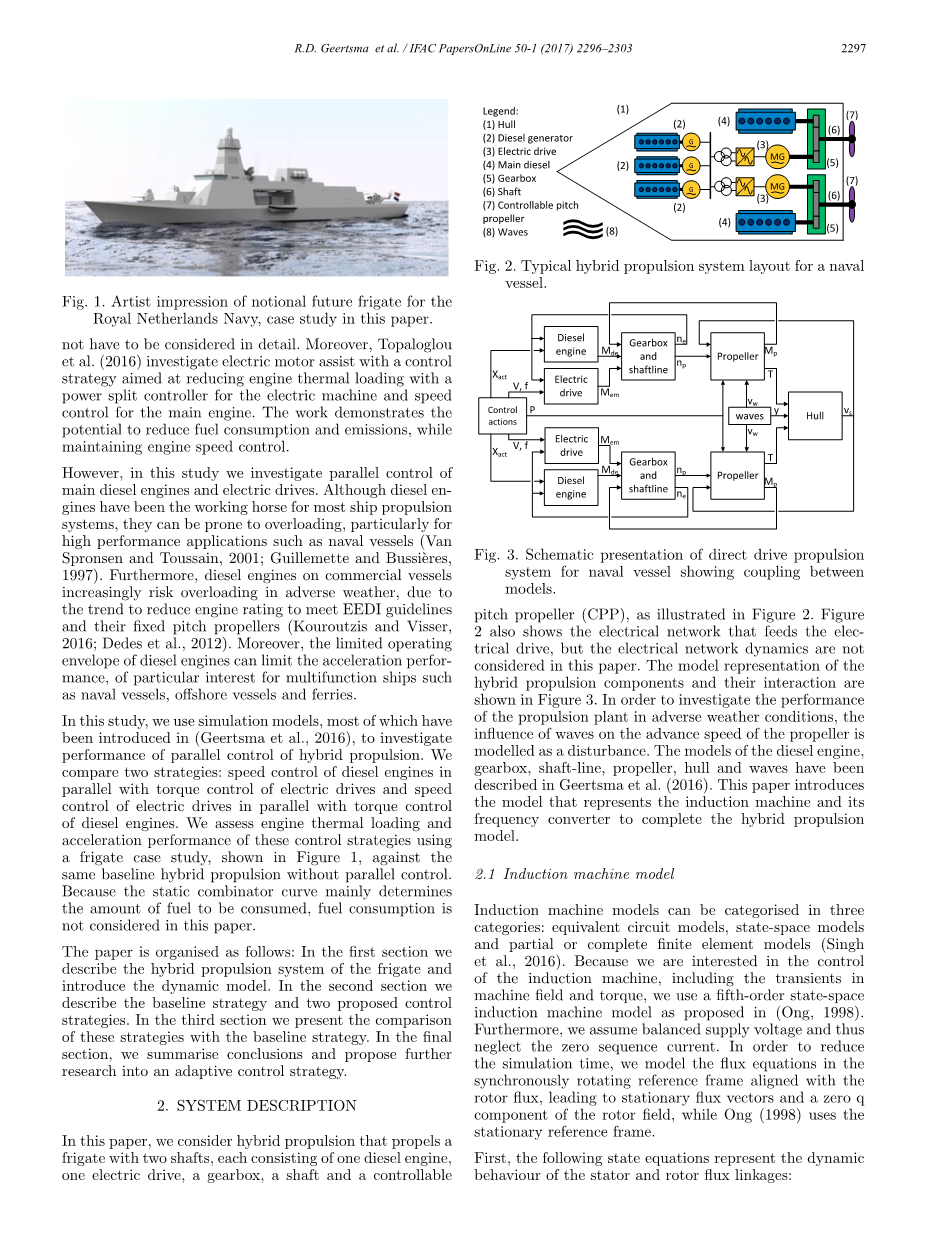
图1.科学家对未来护卫舰的印象荷兰皇家海军,本文进行案例研究。
不必详细考虑。 此外,托帕洛格等(2016)研究带有控制的电动机辅助旨在减少发动机热负荷的策略电机和速度的功率分配控制器
控制主机。 作品展示了减少燃油消耗和排放的潜力,而保持发动机转速控制。
但是,在这项研究中,我们研究了并行控制主要的柴油发动机和电力驱动器。 尽管柴油机一直是大多数船舶推进的主力军系统,它们可能易于过载,特别是对于高性能应用,例如军舰(范Spronsen和Toussain,2001; 吉列梅特和布西埃雷斯,1997)。 此外,商用船上的柴油发动机由于降低发动机额定值以满足EEDI准则的趋势
及其固定螺距螺旋桨(Kouroutzis和Visser,2016; Dedes等,2012)。 而且,操作受限柴油机的外壳会限制加速性能,这对于多功能船舶尤其如此作为海军舰船,近海船和渡轮。
在本研究中,我们使用仿真模型,其中大多数具有(Geertsma et al。,2016)中引入了混合动力的并行控制性能 我们比较两种策略:柴油机的速度控制与电驱动和速度的转矩控制并行与转矩控制并行控制电驱动柴油发动机。 我们评估发动机的热负荷并这些控制策略的加速性能使用一个护卫舰的案例研究,如图1所示,相同的基线混合动力,无需并行控制。因为静态组合曲线主要决定消耗的燃料量,燃料消耗为本文未考虑。
本文的组织方式如下:在第一部分中,我们描述护卫舰的混合动力系统介绍动态模型。 在第二部分中,我们描述基线策略和两个拟议的控制措施策略。 在第三部分中,我们将进行比较这些策略与基准策略。 在第四部分中,我们总结结论并提出进一步建研究自适应控制策略。
- 系统说明
在本文中,我们认为混合动力推动了两轴护卫舰,每个轴由一台柴油发动机组成,一个电驱动器,一个变速箱,一个轴和一个可控螺距螺旋桨。
图2.海军的典型混合动力系统布局容器。
图3.直接驱动推进的示意图舰船系统,显示了两者之间的耦合模型。
螺距螺旋桨(CPP),如图2所示。图2还显示了为电子驱动器供电的电网,但电网动态不是在本文中考虑过的模型表示混合动力组件及其相互作用是如图3所示。为了调查性能恶劣天气条件下的推进装置,波对螺旋桨前进速度的影响是建模为干扰。 柴油机的型号
变速箱,轴,螺旋桨,船体和波浪在Geertsma等人中描述。 (2016)。 本文介绍代表感应电机的模型及其变频器完成混合动力推进模型。
2.1感应电机型号
感应电机型号可分为三类类别:等效电路模型,状态空间模型和部分或完整的有限元模型(辛格等人,2016年)。 因为我们对控制感兴趣感应电机的瞬态变化,包括机器场和扭矩,我们使用五阶状态空间(Ong,1998)中提出的感应电机模型。此外,我们假设电源电压是平衡的,因此忽略零序电流。 为了减少在仿真时间,我们在模型中对通量方程建模同步旋转参考系,与转子磁通,导致平稳磁通矢量和零q转子场的组成部分,而Ong(1998)使用定参考系。
首先,以下状态方程表示动态定子和转子磁链的行为:
其中,方位角Psi;eqs是定子磁通的正交分量旋转参考帧中的每秒链接数,以V为单位,omega;b是以rad / s为单位的基频,uqs是正交定子电压的分量,单位为V,rs为定子s,xs中的电阻是Omega;,selfe中的定子自感,平方米是互通链的正交分量以V为单位的旋转参考系每秒的速度,omega;e为旋转参考系的频率,以弧度/秒为单位,Psi;ds是每个定子磁链的直接分量在V旋转参考系中的第二个,uds是定子电压的直接分量,单位为V,Psi;emd是每秒互通量链接的直接分量旋转参考坐标系,V,Psi;eqr是正交的转子磁链中每秒的分量以V为单位的旋转参考系,rr为以Omega;,xr是in中的转子自感,omega;r是电转子速度rad / s,Psi;edr是旋转参考中每秒的转子磁链V和rho;e中的帧是旋转参考的角度相对于定子a相的框架。电气转子转速omega;r由感应电机确定轴速omega;i如下:
其中Pp是电机的极对数。
- 互通与定子和转子的磁通可以表示如下:
其中xM是Omega;中的等效电感,xm是中的互感。
三,定子和转子的正交电流和直流电流
在同步旋转参考系中,即iqs,即ids,即iqr。idr可用以下方程式表示:
然后可以通过Park的变换获得电流的相位值(Ong,1998,第5页,第142页)。 这些当前值用作控制器的反馈。最后,在感应机可描述如下:
2.2变频器型号
这项研究调查了混合动力的并行控制的机械动力学。 这项研究无意研究电网的动力学。 因为现代变频器的响应时间在毫秒级,机械动态响应为假设感应电机为0.1 s的量级供给理想的电压源。 变频器因此被建模为理想的电压源,提供了向感应电机请求的电压和频率。提供电压和频率的控制策略参考将在第3节中讨论。
3.控制策略
3.1基线控制策略
在基准控制策略中,主柴油机在高船速下提供推进力。 首要的
控制目标是根据要求提供推进虚拟轴转速nvirt(以rpm为单位),是引入的变桨比P和轴转速ns(rpm)(Vrijdag et al。,2008),如下所示:
其中P0是螺旋桨输出的螺距比推力为零时,Pnom为标称螺距比。
虚拟轴转速设定值之间的关系,发动机转速设定值和桨距比设定值在Martelli中讨论的组合曲线中确定(2014)和Geertsma等。 (2016)。 该组合曲线应确保发动机的静态工作点在设计条件下对发动机有足够的余量工作范围。 组合中使用的组合曲线基线控制策略如图4所示。注意,基线的标称螺距比Pnom控制策略低于(1.48)
并行控制策略(1.8),因为总可用最大轴转速下的功率降低。
图4.柴油机械和混合动力的组合器曲线基线和并行控制策略的推进。
图5.用于速度的机械推进的控制回路控制和转矩控制。
而且,螺旋桨与混合动力装置的匹配是通过柴油的总可用功率完成的
发动机和电驱动器根据匹配Stapersma(2005)中提出的程序。
基准控制器的主要控制策略是发动机转速控制,使用来自
组合器曲线。柴油的示意图发动机转速控制如图5所示。算法定义如下:
Xset是燃油泵设定点的百分比,KPS是速度控制的比例增益,KIS是复位率对于速度控制,nref是以%为单位的参考速度,nnom是标称发动机转速,单位为转/秒。
为了防止柴油机的热过载,可以按照以下方法限制加速速度:
Vrijdag等。(2010)。 虚拟轴速度加速率为0.75转/秒时,发动机负载保持在工作范围,如第4节所示。表1列出了最终的速度控制参数。
在所有控制策略中,变桨控制器和相关液压回路的行为都得到了简化具有Geertsma中所述的一阶时间延迟等(2016)。 考虑到的替代建模策略CPP系统中由于非线性导致的延迟行为,如Godjevac等人所述(2009),在Wesselink等人中提出(2006),Martelli(2014)和Martelli等(2014)。
图6.面向间接场的示意图控制策略
3.2与电驱动扭矩平行的发动机转速控制控制
在这种控制策略中,次级控制目标是协助柴油发动机的主推进器
保持船速并增加加速度,同时保持提供所要求的虚拟物品的主要目的
轴速度。 我们维持发动机转速控制并提供电动机的轴向附加扭矩。
电动机转矩由直接磁场控制Blaschke(1974)和Hasse提出的定向控制(1969年),并在Sudhoff等人的文章中进行了深入探讨。 (1998),Trzynadlowski(2001)和Ong(1998)。 图6说明
磁场定向控制的示意图本研究中使用的策略。
同步旋转参考系中的正交和直流参考,即*iqs和ieA中的ids lowast;是由转矩和直接转子磁通参考值确定T *em in Nm和Psi;elowast;V中的idr,如下所示:
同步旋转参考系中的实际正交和直流,即*iqs和ie lowast;A中的ids可以是由测得的定子电流确定通量omega;slip,单位为rad / s,如下所示:
随后,应用PID控制获得正交并直接参考Q *和D *,如下所示:
其中KP T,KIT,KPD和KID是增益和重置费率,这是通过手动调整确定的表1中定义。
最后,如(Ong,1998年,第 9,第448页),用于获取直接和
正交参考电压vs *qs和vs lowast;qs,如下所示:
然后可以得到电压的相位值使用克拉克的变换(Ong,1998,Ch。5 p。142)这些相电压用作参考电压理想的变频器电压源。
转矩控制的相对转矩设定值T lowast;Nm中的em是虚拟轴速度的函数,如图所示图4中的组合曲线。因为我们打算研究发动机转速控制之间的区别和电驱动速度控制,我们使用相等的功率使用螺旋桨法在发动机和电动驱动器之间进行分配。 两种提议的并行控制策略都可以与更高级的优化功率分配相结合针对汽车应用提出的控制策略在Sciarretta等。 (2014),Koot等。 (2005)和席尔瓦斯等。 (2015年)以及在Grimmelius等人的船舶中的应用。(2011年)和Breijs和Amam(2016年)。此控制策略的设置与基线策略,如图4所示。
3.3与发动机扭矩平行的电驱动速度控制控制
在这种控制策略中,主要目标还是以要求的虚拟轴速推进船舶
以下主要目标:<!--
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[237389],资料为PDF文档或Word文档,PDF文档可免费转换为Word



